

Учебное пособие 1692
.pdfИтак, для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из двух координатных осей в плоскости этих сил равнялась нулю, и чтобы сумма моментов всех сил относительно любой точки, расположенной в плоскости этих сил, также равнялась нулю.
Следует отметить, что вместо уравнений равновесия (8.8) для плоской системы сил можно использовать уравнения
|
|
|
X k 0; |
M O1( Pk ) 0 |
M O2 ( Pk ) 0 , (8.9) |
при условии, что ось х - не перпендикулярна отрезку O1O2;
|
|
|
M O1( Pk ) 0, |
M O2 ( Pk ) 0, |
M O3 ( Pk ) 0 , (8.10) |
при условии, что точки O1, O2, O3 не лежат на одной прямой.
При решении задач можно пользоваться тремя видами систем уравнений равновесия (8.8), (8.9), (8.10) исходя из конкретных условий задач. Выбор вида системы уравнений равновесия зависит в первую очередь от особенностей задачи, уровня знаний, опыта, желания и вкуса решающего.
Использование уравнений равновесия в виде (8.9) и (8.10) иногда позволяет существенно упростить решение задачи.
Известно, что момент силы, отличной от нуля, относительно данной точки равен нулю, когда линия действия силы проходит через данную точку. Отсюда следует практически важный вывод: если при определении неизвестных сил нужно составить уравнения, в которые входят моменты этих сил, то за центр моментов О выгодно брать точку, через которую проходят линии действия неизвестных сил. Подобный подход позволяет иногда получить вместо системы уравнений равновесия совокупность уравнений, каждое из которых содержит только одну неизвестную величину и избежать решения системы уравнений равновесия. Это обстоятельство очень важно
146
для уменьшения влияния отдельных ошибок вычислений на все решение.
8.2.5.Система параллельных сил, расположенных
водной плоскости.
Если все параллельные силы лежат в плоскости х, у, то, выбирая оси так, чтобы ось Ox была перпендикулярна силам,
получим, что все Xk = 0, a Yk = Pk, где Pk – проекция силы на
ось у силы Pk . Из системы (8.8) остаются два уравнения
|
|
|
Pk 0; |
M0 ( Pk ) 0 . |
(8.11) |
Итак, для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы были равны нулю сумма проекций всех сил на ось, параллельную силам, и сумма величин моментов всех сил относительно любой точки, расположенной в плоскости этих сил.
Для плоской системы параллельных сил вместо уравнений (8.11) можно записать
|
|
|
M01( Pk ) 0; |
M02( Pk ) 0 , |
(8.12) |
при условии, что отрезок O1O2 не параллелен силам.
Эта система получится из (8.9), если ось Ox направить перпендикулярно силам.
Для плоской системы сходящихся сил докажем две теоремы, позволяющие пользоваться еще двумя видами систем уравнений вместо системы уравнений (8.6).
Теорема 8.3. Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы выполнялись условия
|
|
|
X k 0; |
M0 ( Pk ) 0 , |
(8.13) |
где ось Ox не перпендикулярна ОС (С - точка схождения сил).
147

Доказательство необходимости. Пусть плоская система сходящихся сил находится в равновесии. Надо доказать, что выполняются условия (8.13). Ранее доказаны необходимые и достаточные условия (8.6). Первое уравнение (8.13) совпадает с первым уравнением (8.6). Кроме того, при равновесии сил
равнодействующая R = 0, поскольку система сходящихся сил всегда эквивалентна одной силе - равнодействующей. По тео-
|
|
реме Вариньона (§ 7.6), M 0 ( R ) |
M0 ( Pk ) . Момент силы, |
|
|
модуль которой равен нулю, равен нулю: |
M0 ( R ) Rh 0 . |
|
|
Поэтому M 0 ( Pk ) 0 . Получено второе уравнение (8.13).
Таким образом, при доказательстве необходимого условия не пришлось воспользоваться требованием о том, чтобы ось Ox не была перпендикулярна ОС.
Доказательство достаточности. Даны условия (8.13). Нужно доказать, что система сил находится в равновесии.
|
|
Предположим противное, что равно- |
|
|
|
весия нет и поэтому равнодейст- |
|
|
|
|
|
|
|
вующая R |
0 . Тогда, согласно (8.13) |
|
|
|
|
|
|
M 0 ( R ) |
M0 ( Pk ) 0 . Если рав- |
|
|
нодействующая не равна нулю, но ее |
|
|
|
момент равен нулю, то линия дейст- |
|
|
|
|
|
|
|
вия R проходит через точку О, (см. |
|
|
|
|
|
|
|
(7.23)). Однако R имеет начало в |
|
|
Рис. 8.5 |
точке схождения сил (рис. 8.5, а). Та- |
|
|
|
ким образом, прямая ОС и линия |
|
|
|
|
|
действия R совпадают. Согласно теореме о проекции вектор- |
|||
ной суммы (7.10) с учетом первого уравнения (8.13), |
|||
R |
X k 0 . Если сила не равна нулю, а ее проекция на ось |
||
Ox равна нулю, то сила перпендикулярна оси Ox. Тогда ось Ox перпендикулярна ОС, что противоречит условию (8.13), согласно которому  90° (см. рис. 8.5, а). Полученное противо-
90° (см. рис. 8.5, а). Полученное противо-
148
речие доказывает теорему, т. е. ошибочность предположения
R 0 . Поэтому R = 0 и система сил находится в равновесии.
Теорема 8.4. Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы выполнялись условия
|
|
|
MO1( Pk ) 0; |
MO2 ( Pk ) 0 , |
(8.14) |
где прямая O1O2 не проходит через точку С схождения сил.
Доказательство необходимости. Пусть плоская система сходящихся сил находится в равновесии. Надо доказать, что выполняются условия (8.14). Однако, условия (8.13) уже доказаны, а уравнения (8.14) совпадают по виду со вторым уравнением (8.13). Следовательно, при доказательстве необходимости не понадобилось ограничивающее условие, требующее чтобы прямая O1O2 не проходила через точку С схождения сил.
Доказательство достаточности. Даны условия (8.14). Надо доказать, что плоская система сходящихся сил находится в
|
|
|
|
равновесии. Предположим противное, что R |
0 . Тогда, со- |
||
гласно теореме Вариньона и (8.14), получаем |
|
||
|
|
|
|
MO1( R ) |
MO1( Pk ) 0 , MO2 ( R ) |
MO2 ( Pk ) 0 . |
|
Следовательно, точки O1 и O2 лежат на линии действия |
|||
|
|
|
|
равнодействующей R , но, как известно, R проходит через |
|||
точку С схождения сил, т. е. три точки O1, O2 |
и С лежат на од- |
||
ной прямой (рис. 8.5, 6), что противоречит (8.14). Следова- |
|||
|
|
|
|
тельно, предположение о том, что R |
0 было неверным, и R = |
||
0, т. е. система находится в равновесии. Теорема доказана.
Следует обратить внимание на то, что для каждой системы сил число уравнений равновесия строго определено, хотя системы этих уравнений могут иметь различный вид. Например, для произвольной плоской системы сил имеем три урав-
149
нения равновесия, объединенных в системы одного из видов; (8.8), (8.9) или (8.10). Поэтому в задачах, рассматривающих равновесие одного тела под действием системы сил, произвольно расположенных в плоскости, не должно быть больше трех неизвестных величин, иначе задача не может быть решена методами статики абсолютно твердого тела. Такие задачи называются статически неопределимыми. Для плоской системы параллельных сил имеем два уравнения равновесия в виде системы (8.11) или (8.12). Для плоской системы сходящихся сил также имеем два уравнения равновесия в виде систем (8.6), (8.13), (8.14). Таким образом, при решении задач для плоской системы параллельных или сходящихся сил число неизвестных величин не должно быть больше двух. Если число неизвестных величин больше числа уравнений равновесия, то такие задачи рассматривают в сопротивлении материалов.
§ 8.3. Распределенная нагрузка
По способу приложения к телу нагрузки делятся на сосредоточенные и распределенные. Выше предполагалось, что нагрузки приложены к телу в точках тела, то есть нагрузки считались сосредоточенными. Сосредоточенная сила - абстракция, так как всякая реальная нагрузка приложена к какому-то участку линии, площади или объему, то есть в бесконечном количестве точек тела. Например, даже сила, передаваемая по нити, распределена по площади поперечного сечения нити. Однако, во многих
случаях, схематизируя (идеализируя) явление, можно считать нагрузку сосредоточенной. Так можно поступать при малости
150

размеров области приложения нагрузки к телу в сравнении с размерами тела или его поверхности.
Однако часто бывает невозможно пренебречь тем, что к рассматриваемому телу приложена нагрузка, распределенная по линии, части поверхности или объема тела. Примерами распределенных нагрузок могут служить нагрузки, создаваемые снегом, ветром, землей, песком, давлением жидкости в резервуаре и пр. Нагрузку, распределенную по длине стержня, характеризуют интенсивностью нагрузки.
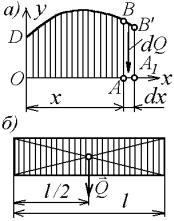
Пусть прямолинейный горизонтальный стержень нагружен распределенной нагрузкой, перпендикулярной его оси. Такой стержень называется в технике балкой. Направим ось х по длине стержня, а начало координат расположим в левом конце балки (рис. 8.6, а).
Обозначим равнодействующую сил тяжести распределенной нагрузки от начала стержня до точки А через Qx. Если прибавим малый элемент длиной dx, то прибавится вес dQx элемента распределенной нагрузки, лежащей на участке dx. Нагрузка на единицу длины стержня на расстоянии х от ее левого конца определяется отношением
qx |
dQx |
(8.15) |
|
dx |
|||
|
|
т. е. производной от величины распределенной нагрузки по координате х. Величину qx называют интенсивностью распределенной нагрузки. Она имеет размерность, получаемую делением размерности силы, на размерность длины, например Н/м.
На рис. 8.6, а дано условное графическое изображение интенсивности распределенной нагрузки. Принято условно изображать распределенную нагрузку над стержнем, если она действует сверху вниз, и изображать ее под стержнем, если она действует снизу вверх. Так как dQx =qxdx , то dQx представляет собой площадь фигуры ABB1A1. Равнодействующую
151

распределенной нагрузки получают интегрированием функции qx по длине участка
Qx |
qx dx |
(8.16) |
|
l |
|
Итак, равнодействующая распределенной нагрузки определяется площадью ODBA, называемой грузовой площадью. Линия действия равнодействующей проходит через центр тяжести грузовой площади (см. гл. 10). Так, центр тяжести рав-
нодействующей равномерной распределенной нагрузки, изображаемой прямоугольником, находится в точке пересечения диагоналей (рис. 8.6, б). Центр тяжести равнодействующей нагрузки, распределенной по закону треугольника, находится в точке пересечения медиан этого треугольника.
§ 8.4. Трение
Трение - широко распространенное явление как в технике, так и в повседневной жизни. Различают трение скольжения и качения.
8.4.1. Трение скольжения Трением скольжения называют сложный физико-
химический процесс, происходящий в области контакта тел при наличии сдвигающих сил или относительного движения тел, и приводящий к появлению силы сопротивления относительному перемещению этих тел. Если к телу, покоящемуся на
горизонтальной плоскости (рис. 8.7), не приложить сдвигаю-
щую силу P , параллельную этой плоскости, то шероховатая опорная плоскость не будет испытывать в горизонтальном на-
правлении никакого действия и, следовательно, не окажет про-
тиводействия, т. е. не возникает сила трения T . Если прило-
152

жить сдвигающую силу |
|
то возникнет противодействующая |
|
P |
|||
|
|
|
|
сила трения T , которая согласно уравнению равновесия |
|||
|
|
|
|
T |
+ P = 0 будет равна сдвигающей силе по величине и проти- |
||
воположно ей направлена. С возрастанием сдвигающей силы
возрастает сила трения. Однако опыт показывает, что при воз- |
|||
|
|
|
|
растании |
P |
наступает момент, когда сила трения T |
достигает |
наибольшего (для данных условий контакта) значения и больше не возрастает. С этого момента увеличение сдвигающей силы приводит к нарушению равновесия и появлению скольжения тела. Наибольшее значение силы трения скольжения называют силой трения покоя или статической силой трения и
|
|
обозначают TS . |
|
Закон Кулона. Сила трения покоя пропорциональна нор- |
|
мальной реакции N опорной поверхности |
|
Ts=f N. |
(8.17) |
Термин «нормальная реакция» означает, что реакция, направлена под углом 90° к опорной поверхности. Сила трения покоя, при прочих равных условиях, не зависит от размеров соприкасающихся поверхностей, в чем легко убедиться экспериментально, при скольжении прямоугольного параллелепипеда по горизонтальной плоскости различными гранями. Коэффициент f, называемый коэффициентом трения скольжения, зависит от физических свойств тел, шероховатостей их соприкасающихся поверхностей, от материалов тел (сталь, стекло, пластмасса и т.д.) и других факторов. Коэффициент f определяют опытным путем, и его значение по справочнику следует выбирать с известной осторожностью, учитывая значительное влияние условий эксперимента на величину измеряемого коэффициента трения.
На рис. 8.7 под углом s к нормали к поверхности прохо- |
||||
дит линия действия полной реакции |
|
|
|
, состоящей из |
R |
N |
T |
||
нормальной реакции N и силы трения. Непосредственно пе-
153
ред появлением скольжения (на пороге равновесия) полная ре-
|
|
|
|
|
|
акция |
RS |
N |
TS . |
|
|
Углом трения |
s называют угол отклонения реакции |
|
|||
RS |
|||||
шероховатой поверхности от общей нормали к поверхности тел в точке их контакта на пороге равновесия. Из рис. 8.7 видно
tg |
T / N ; tg s TS / N . |
|
Так как T <TS, то tg <tg s, и, следовательно, |
< s. |
|
Поэтому на пороге равновесия полная реакция имеет наи- |
||
большее отклонение от нормали. |
|
|
Пусть к телу в горизонтальной плоскости прикладывают- |
||
|
|
|
ся по всевозможным направлениям сдвигающие силы |
P , та- |
|
кие, что тело находится в равновесии. Тогда линия действия
полной реакции RS опишет конус. Этот конус будет круглым,
если коэффициент f имеет одинаковые значения независимо от направления сдвигающей силы.
Конусом трения называют множество линий действия
полных реакций RS шероховатой поверхности, соответст-
вующих различным направлениям сдвигающей силы. Из из-
ложенного следует, что если тело находится в равновесии, то
полная реакция R заключена внутри конуса трения или, в
крайнем случае, совпадает с одной из его образующих, когда
|
|
|
достигается порог равновесия и сила трения TS |
становится |
|
максимальной. |
|
|
С учетом (8.17) tg s Ts |
N f N N f |
или |
f= tg |
s. |
(8.18) |
Следовательно, коэффициент трения скольжения равен тангенсу угла трения. Согласно (8.18) коэффициент f - величина безразмерная.
154

8.4.2. Трение качения
Опыт показывает, что цилиндрический каток радиуса r и
веса G можно перекатывать по горизонтальной поверхности
не при всякой величине движущей силы P , приложенной в его центре и направленной параллельно опорной поверхности катка. Лишь в том случае, когда эта сила достигает некоторого предельного значения Рmах (рис. 8.8), каток начнет движение.
Это явление указывает на наличие сопротивления перекатыванию катка, условно называемого трением качения.
Чтобы объяснить возникновение трения качения, допустим,
что опорная поверхность под цилиндром, который будем счи-
тать абсолютно твердым, деформируется. Реакция R опорной поверхности смещается в точку В на некоторое расстояние k от вертикали ОС,
проходящей через центр цилиндра, в сторону качения цилинд-
ра. Разложим эту реакцию на вертикальную и горизонтальную |
||||
составляющие: |
|
|
|
и, считая цилиндр находящимся на |
R |
N |
F |
||
пороге равновесия, составим уравнения его равновесия в проекциях на горизонтальную и вертикальную оси (см. рис. (8.8)):
X 0; Pmax F 0; Y 0; N G 0 .
Отсюда следует, что Pmax = F; G = N.
Таким образом, цилиндр находится в равновесии под
действием двух пар сил: перекатывающей ( Pmax ,F ) и пары сил
сопротивления ( G,N ) с противоположными по знаку моментами. Уравнение равновесия моментов всех сил относительно точки В имеет вид -Рmax ОС + GBC = 0. Вследствие малой де-
формации опорной плоскости можно положить ОС |
r и ВС = |
k. Тогда |
|
Pmax kG / r . |
(8.19) |
155 |
|