

2.4. Расчет главного электропривода
Наиболее сложным вопросом при проектировании механических прессов является задача автоматизации расчета мощности главного электродвигателя, которая определяется заданной технологической операцией. Для упрощения расчета и обеспечения возможности штамповки на проектируемом прессе широкой гаммы деталей берутся типовые графики технологического нагружения, показанные на рис. 23.
Существующая в настоящее время методика, применяемая в традиционном проектировании, предполагает определение площади графика крутящего момента вручную, при ручном же перестроении графиков с учетом заданной жесткости проектируемой кузнечно-прессовой машины.
|
|
|
а) вырубка |
б) вырубка при увеличенном ходе |
в) вырубка на прессе двойного действия |
|
|
|
г) гибка |
д) горячая объемная штамповка |
е) горячее выдавливание |
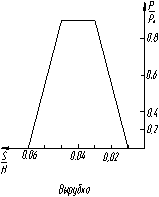

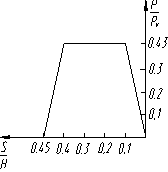


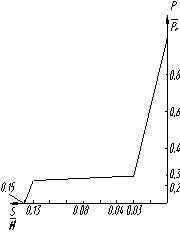
Рис. 23. Типовые графики технологической нагрузки
Для расчета мощности электродвигателя, муфты и тормоза пресса находится суммарный момент инерции разгоняемых (при включении муфты) и тормозимых (при включении тормоза) деталей привода.
Момент инерции деталей цилиндрической формы вычисляется по зависимости:
 ,
кНм2,
(2.57)
,
кНм2,
(2.57)
где Ji - удельный вес материала элемента i в кН/м3 (для стали Ji=78,50 кH/м3, для чугуна Ji=74 кH/м3);
Biширина элемента i в м;
Di и diнаружный и внутренний диаметры элемента i в м;
Aiрасстояние от оси, относительно которой вычисляется момент инерции Ji элемента i ,до центральной оси элемента в м (для эксцентричных деталей).
Согласно кинематической схеме при включении муфты происходит разгон блока эксцентрика, промежуточного вала и приводного вала с ведомыми деталями муфты и тормоза.
Момент инерции JT эксцентрика с деталями вычисляется на основании рис. 6 Вычисления момента инерции JT сведены в табл. 6.
Момент инерции Jп промежуточного вала вычисляется на основании эскиза, данного на рис., и приведен в табл..
Момент инерции JP приводного вала вычисляется на основании рис. 8, и приведен в табл. 8.
Момент инерции Jм маховика с деталями муфты и тормоза вычисляется по эскизу, данному на рис. . Значение момента инерции Jм дано в табл. .
Суммарный момент инерции разгоняемых и тормозимых деталей, приведенный к валу муфты:
![]() ,
кНм2,
(2.58)
,
кНм2,
(2.58)
где Кп=1,1 коэффициент, учитывающий момент инерции ползуна и кривошипноколенного механизма,
uT и uB передаточные числа тихоходной и быстроходной зубчатой передачи.
Суммарный, приведенный к валу маховика, момент инерции деталей привода,:
![]() ,
кНм2
(2.59)
,
кНм2
(2.59)
Момент инерции ведущих деталей привода, приведенный к валу муфты
![]() ,
кНм2
(2.60)
,
кНм2
(2.60)
Момент инерции ведомых деталей привода, приведенный к валу муфты
![]() ,
кНм2
(2.61)
,
кНм2
(2.61)
Мощность электродвигателя пресса и необходимый момент инерции маховика определяются с учетом особенностей технологической операции, для которой проектируется механический пресс. Обычно это учитывается построением типового графика нагружения в зависимости усилий Р штамповки от пути S ползуна, которые представлены на рис. .
Далее, определим работу, затрачиваемую на штамповку, без учета деформации системы “пресс-штамп”.
Поскольку этот процесс довольно трудоемкий, то предлагается выполнить его автоматизацию. Поставленная задача значительно упрощается, в силу того, что графики состоят из трех участков прямых линий, как показано на рис. 24.

Рис. 24. Разделение графиков технологических процессов на участки, подлежащие аппроксимации
Аппроксимация выполняется на основе уравнения прямой, проходящей через две точки.
Что выполняется следующим образом.
Вначале определяются действительные координаты, т.е. отношения S/H и P/PH замещаются S и P, после чего имеем следующие координаты
-
Первый участок
x1 =
3
y1 =
0
x2 =
7,5
y2 =
5000
Рис. 25. Действительные координаты точек графика
Далее вычисляется
шаг изменения аргумента
![]() ,
где K
– число точек, на которые разбивается
интервал x1…x2.
,
где K
– число точек, на которые разбивается
интервал x1…x2.
Для получения координаты по оси абсцисс следующей точки, необходимо прибавить полученное значение к координате x предыдущей точки. Координата y для текущей точки вычисляется следующим образом |
Рис. 26. Окно рабочей книги Microsoft Excel |

![]() (2.62)
(2.62)
Далее цикл повторяется до установленного ранее числа K и окончательно таблица рассчитанных координат без учета жесткости пресса выглядит следующим образом

Рис. 27. Вычисление координат точек графика функции
Для удобства построения графика по вычисленным значениям сведем их в промежуточную таблицу
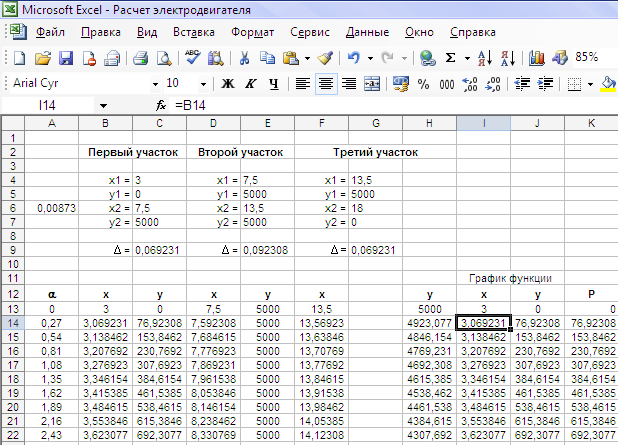
Рис. 28. Промежуточная таблица построения графика
Последний столбец в поле «График функции» соответствует первому столбцу в этом же поле, только его значения выстроены в «обратном» расчетному порядке с целью сохранения начальной формы графика. Результатом выполненных действий является получение графика технологического нагружения машины с учетом действительных значений усилия и полного хода ползуна (рис. 29).
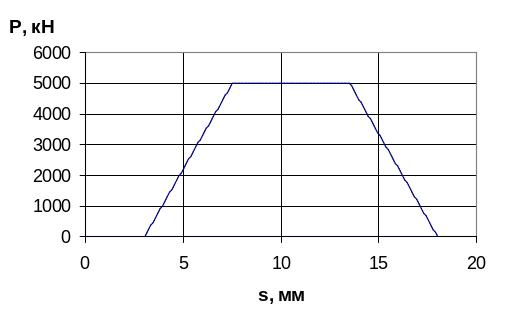
Рис. 29. Перестроенный график операции «Вырубка» в действительных координатах
Величина жесткости кузнечно-прессового оборудования может определяться исходя из следующего соотношения
![]() ,
(2.63)
,
(2.63)
где K – поправочный коэффициент, зависящий от вида проектируемого оборудования и определяющийся из имеющегося опыта; PH – номинальное усилие проектируемой машины.
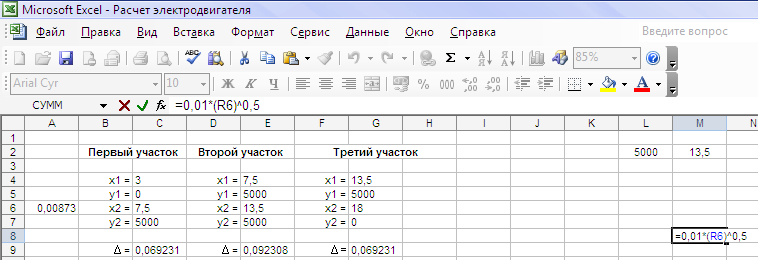
Рис. 30.Расчет величины жесткости
Текущий график жесткости для рассматриваемой операции «вырубка» представлен на рис. 31. Перестроенный график с учетом полученной деформации пресса можно построить, прибавляя или вычитая на соответствующих участках графика величину деформации (рис. 32).
Для построения графика функциональной зависимости вида Mk = f(), где Mk – величина крутящего момента, кНм; – угол поворота эксцентрикового или коленчатого вала, град. Выполнить это можно, если за перемещение ползуна принять аргумент получившегося после перестроения графика технологического нагружения (рис. 33).
Рис. 31. График жесткости |
Рис. 32. Алгоритм перестроения графика технологической операции |
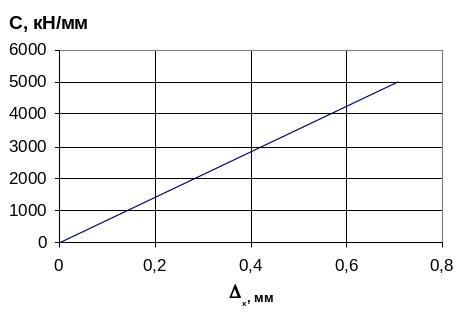
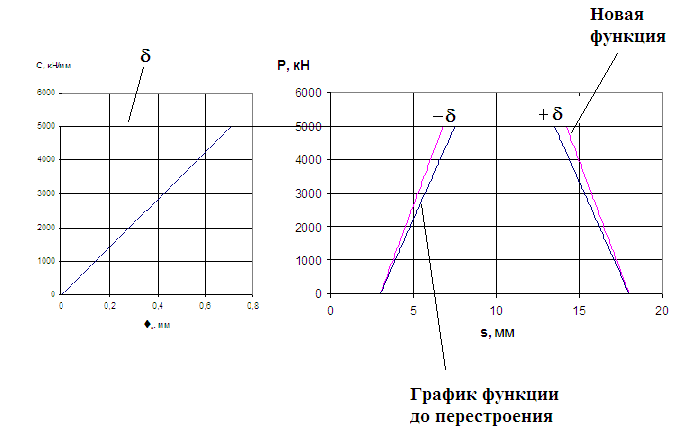
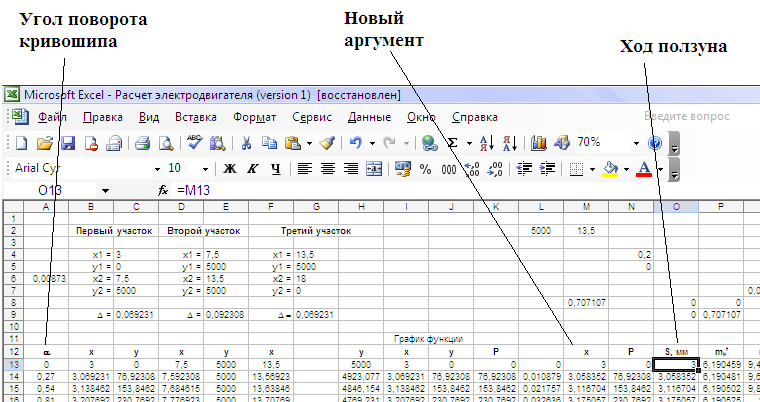
Рис. 33. Таблица промежуточных значений
Величина крутящего момента состоит из двух частей – идеального плеча и плеча трения с учетом действующей технологической силой и определяется следующим образом
![]() (2)
(2)
Таким образом, становится легко построить два графика P=f() и Mk=f().
-

а) P=f()

б) Mk=f()
Рис. 34. Графики функций усилия и крутящего момента в зависимости от угла поворота кривошипного или эксцентрикового вала
Работа на эксцентриковом валу с учетом потерь на трение в кривошипно-шатунном механизме определяется по зависимости:
![]() (2.65)
(2.65)
Работа, затрачиваемая на разгон деталей при включенной муфте равна:
![]() (2.66)
(2.66)
Необходимая мощность электродвигателя при работе пресса на одиночных ходах с заданным графиком усилий определяется по формуле:
![]() (2.67)
(2.67)
Далее осуществляем выбор электродвигателя. Для главного электропривода пресса выбираем электродвигатель соответствующей серии (см. табл. ) со следующими необходимыми параметрами: NH, nH, n0, H.
Для уменьшения необходимого момента инерции маховика в ротор устанавливаемого электродвигателя включается дополнительное сопротивление, повышающее номинальное скольжение до величины s.
При новом скольжении действительные значения частоты вращения n и мощности N электродвигателя определяются по зависимостям:
![]() (2.68)
(2.68)
![]() (2.69)
(2.69)
Среднюю мощность за цикл найдем из следующей формулы:
![]() (2.70)
(2.70)
Для определения необходимого момента инерции маховика вычислим вспомогательный коэффициент по следующей зависимости:
 (2.69)
(2.69)
где - угол поворота кривошипа за время выполнения технологической операции, найденный по графику крутящих моментов;
![]() - коэффициент
запаса мощности.
- коэффициент
запаса мощности.
Необходимый момент инерции маховика вычисляется по формуле:
![]() ,
(2.71)
,
(2.71)
где
![]() - коэффициент, учитывающий
- коэффициент, учитывающий
неравномерность вращения маховика;
- поправочный коэффициент, зависящий от коэффициента запаса мощности;
Sp - величина скольжения клиноременной передачи;
- угловая скорость маховика.
В заключении расчета произведем проверку достаточности мощности выбранного двигателя для выполнения заданной операции.
Суммарный момент инерции деталей привода, был определен ранее. Правильность выбора электродвигателя определяется выполнением следующих условий: NP < N и JC > JН.