

Статические системы
Рассмотрим простейшую схему автоматического прямого регулирования (рис. 7.1).

Чем больше нагрузка, т. е. расход Оттока, тем больше будет открыта задвижка на притоке и, следовательно, тем ниже будет находиться поплавок в состоянии равновесия. А это значит, что с возрастанием нагрузки в данной схеме значение уровня воды, т.е. регулируемой величины, будет уменьшаться.
Регулирование называется статическим, если установившееся после окончания переходного процесса значение регулируемой величины при различных постоянных значениях нагрузки будет принимать также различные постоянные значения, зависящие от нагрузки.
Регулятор, осуществляющий статическое регулирование, называется статическим регулятором.
Для характеристики степени зависимости отклонения регулируемой величины от нагрузки в теории регулирования пользуются понятием неравномерности или статизма регулирования.
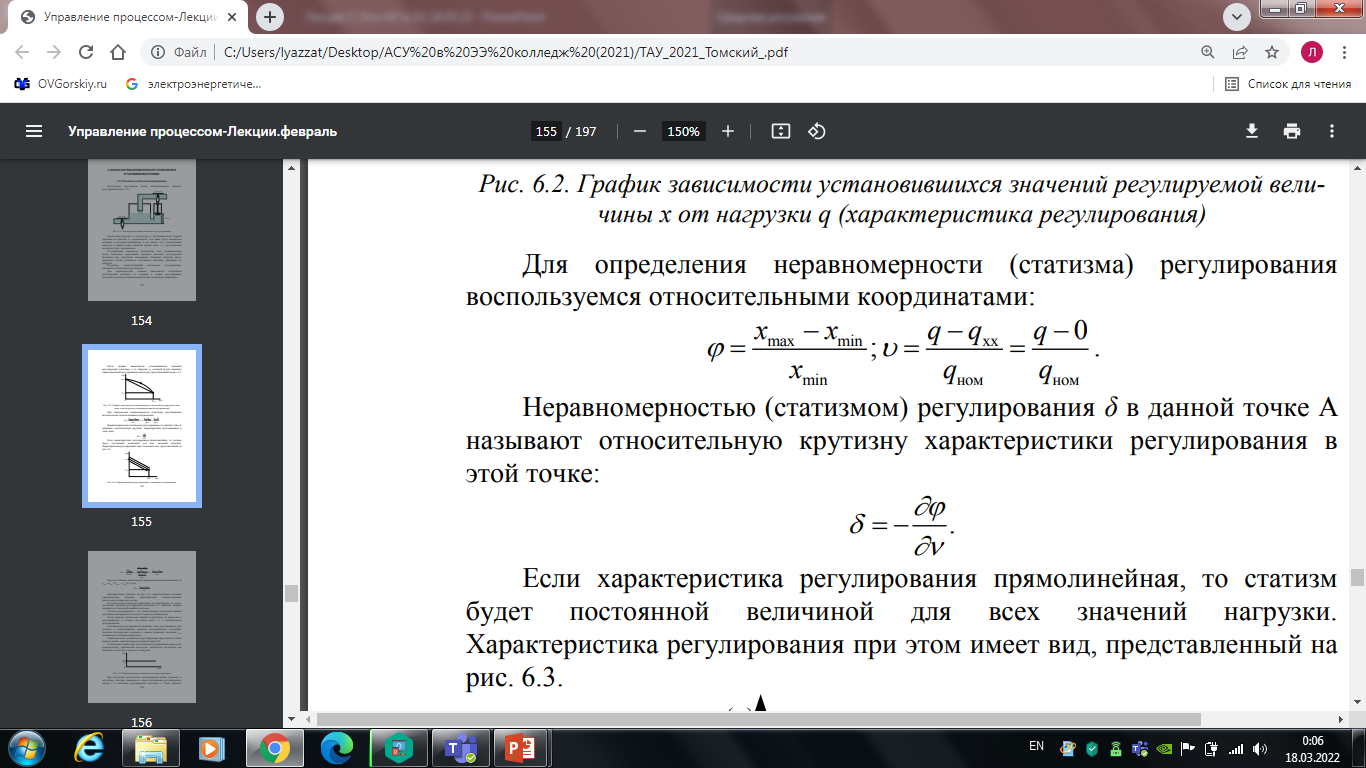
Пусть график зависимости установившихся значений регулируемой величины x от нагрузки q, который будем называть характеристикой регулирования, имеет вид, представленный на рис. 7.2.

Рис. 7.2. График зависимости установившихся значений регулируемой величины x от нагрузки q (характеристика регулирования)
Для определения неравномерности (статизма) регулирования воспользуемся относительными координатами:
Неравномерностью (статизмом) регулирования δ в данной точке А называют относительную крутизну характеристики регулирования в этой точке:
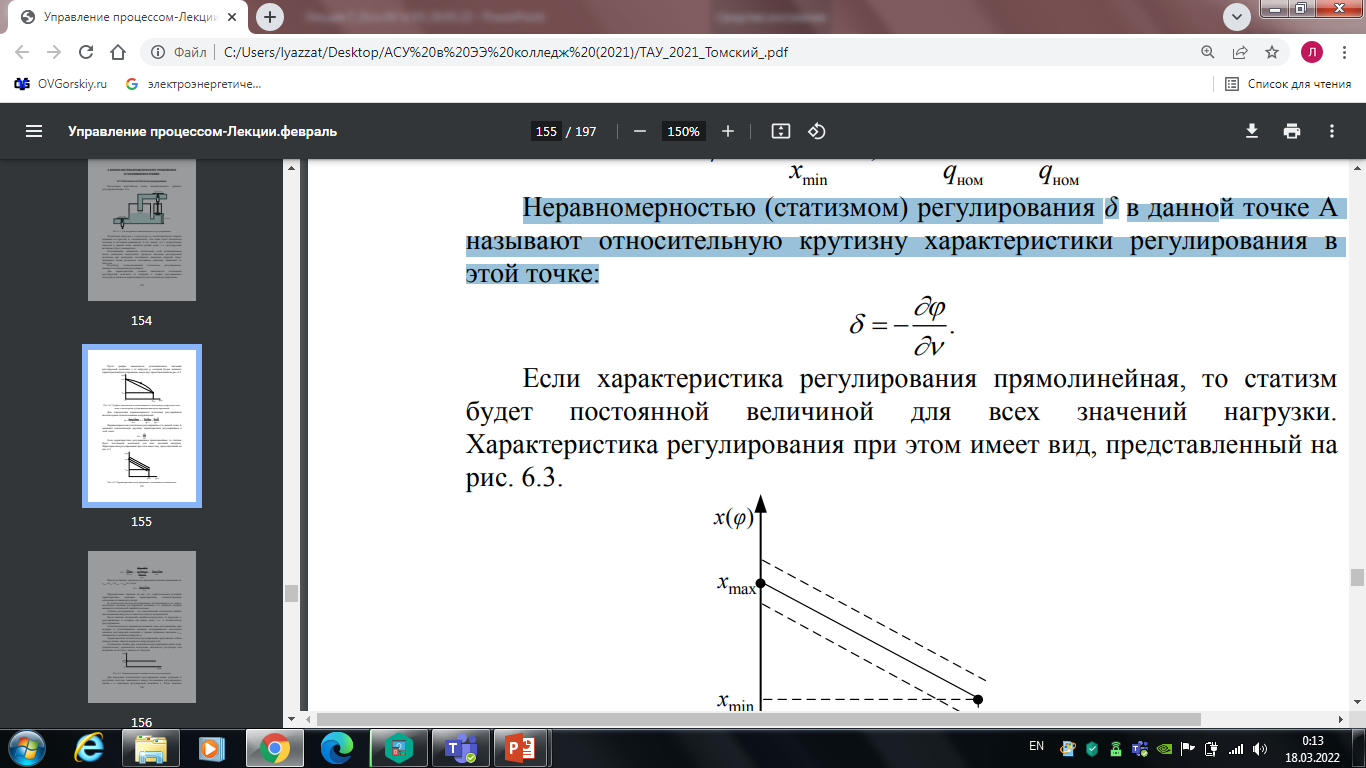
Если характеристика регулирования прямолинейная, то статизм будет постоянной величиной для всех значений нагрузки. Характеристика регулирования при этом имеет вид, представленный на рис. 7.3.
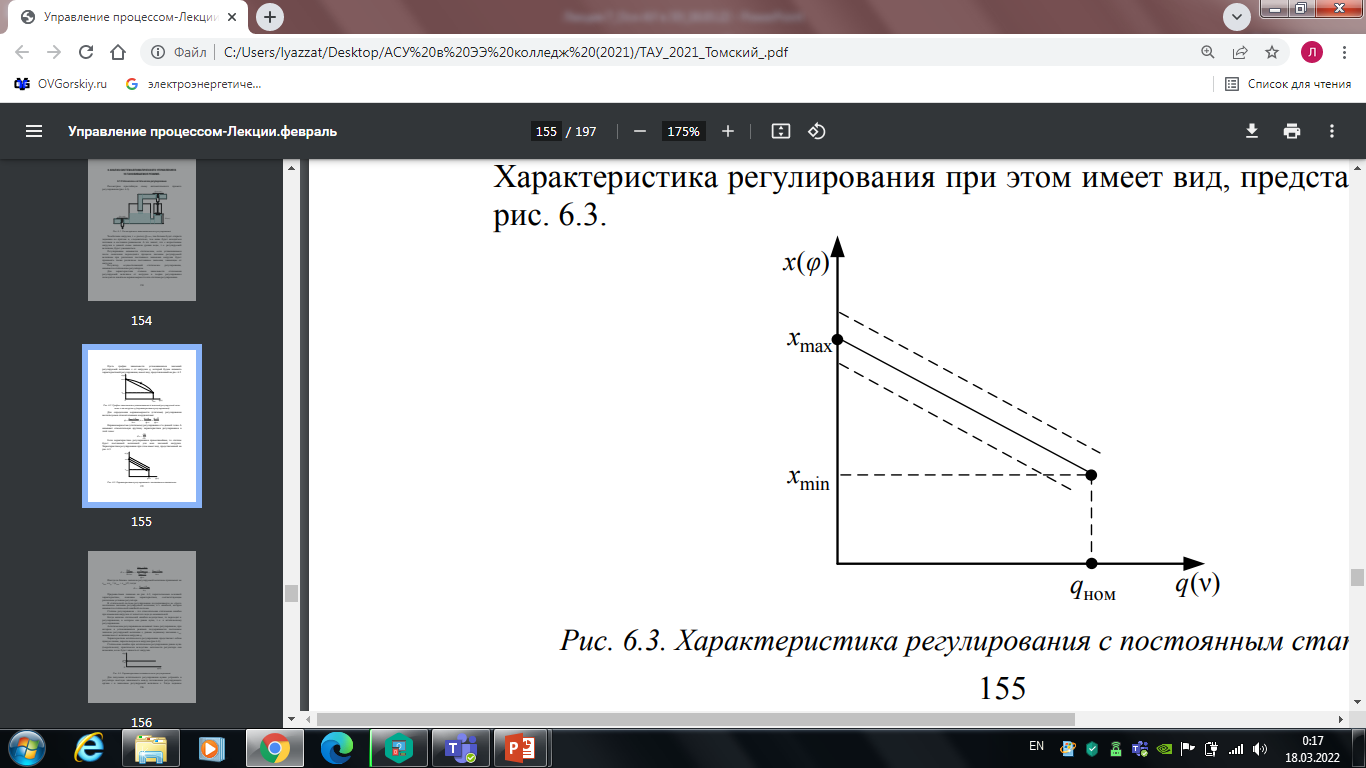
Рис. 7.3. Характеристика регулирования с постоянным статизмом
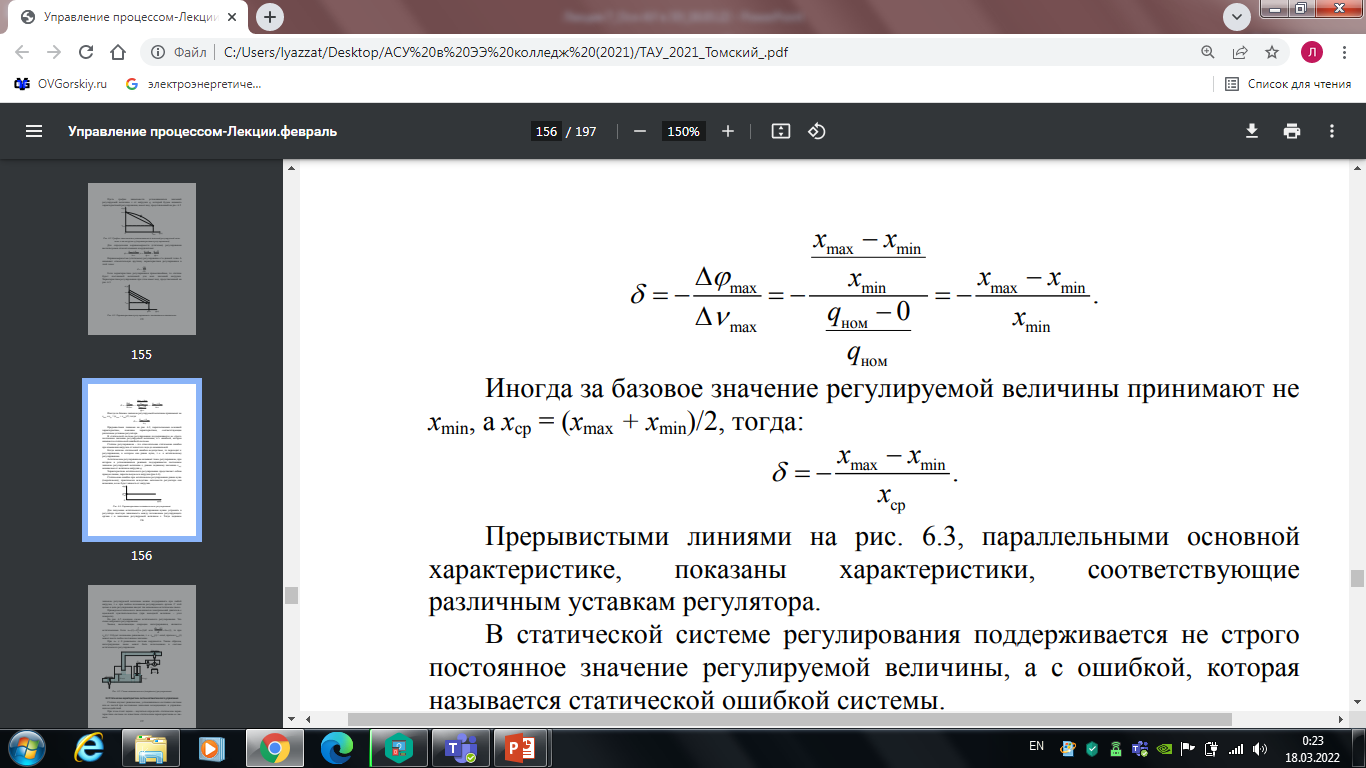
Иногда за базовое значение
регулируемой величины принимают не
 ,
а
,
а
 ,
тогда:
,
тогда:
Прерывистыми линиями на рис. 7.3, параллельными основной характеристике, показаны характеристики, соответствующие различным уставкам регулятора.
В статической системе регулирования поддерживается не строго постоянное значение регулируемой величины, а с ошибкой, которая называется статической ошибкой системы. Статизм регулирования – это относительная статическая ошибка при изменении нагрузки от холостого хода до номинальной.
Когда наличие статической ошибки недопустимо, то переходят к регулированию, в котором она равна нулю, т. е. к астатическому регулированию.
Астатические системы
На рис. 7.4 показана схема астатического регулирования. Это схема непрямого регулирования.
Примером астатического звена является электрический двигатель с идеальной чувствительностью (при выходной величине – угол поворота).
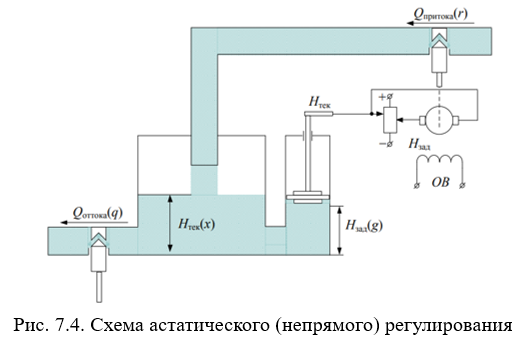
Астатическим регулированием называют такое регулирование, при котором в установившихся режимах поддерживается постоянное значение регулируемой величины x, равное заданному значению xзад, независимо от величины нагрузки q.
Характеристика астатического регулирования представляет собою прямую линию, параллельную оси нагрузки (рис 7.5). Статическая ошибка при астатическом регулировании равна нулю (теоретически); практически вследствие неточности регулятора она возможна, но не будет зависеть от нагрузки.
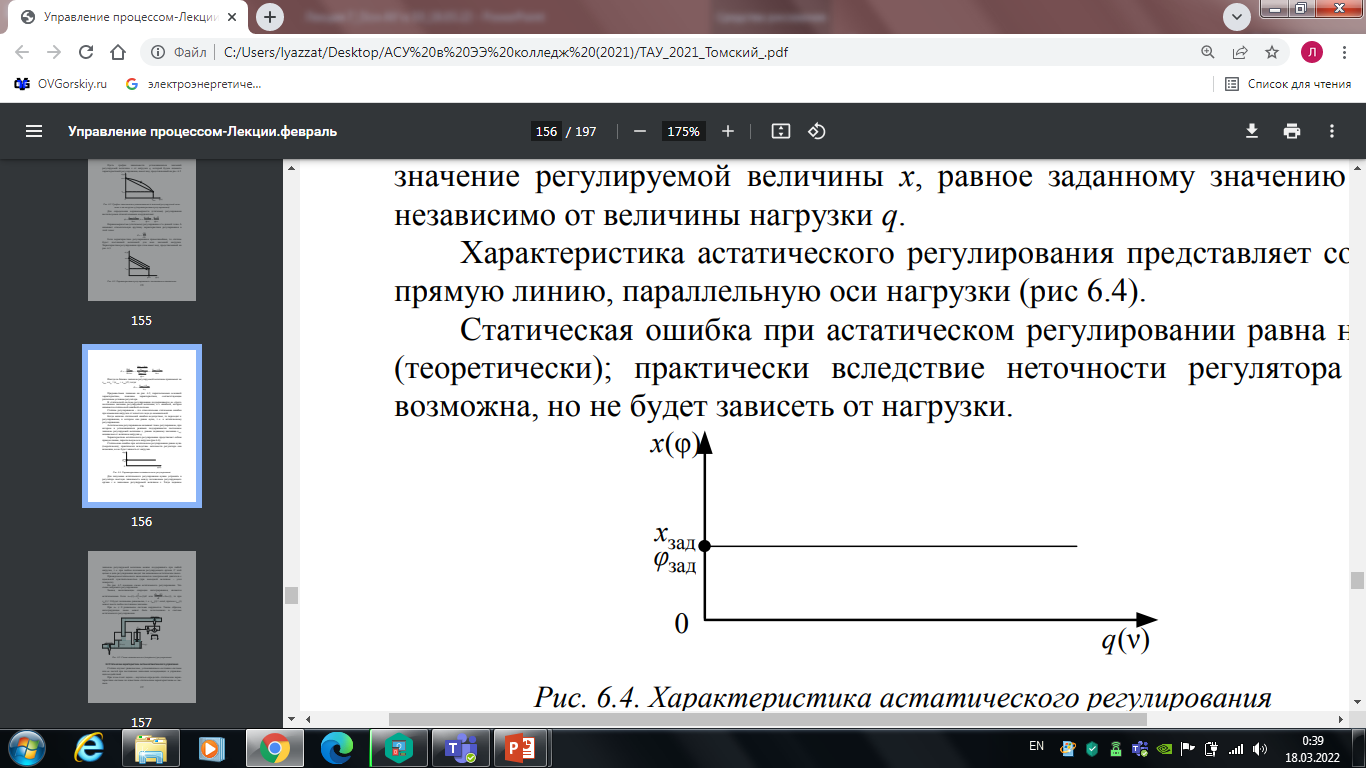
Рис. 7.5. Характеристика астатического регулирования
Для получения астатического регулирования нужно устранить в регуляторе жёсткую зависимость между положением регулирующего органа r и значением регулируемой величины x. Тогда заданное значение регулируемой величины можно поддерживать при любой нагрузке, т.е. при любом положении регулирующего органа. С этой целью в цепь регулирования вводят так называемое астатическое звено.
Звенья, выполняющие операции
интегрирования, являются астатическими.
Если
 или
или
 ,
то при
будет положение равновесия, т. е.
,
то при
будет положение равновесия, т. е.
 причём
причём
 может иметь любое постоянное значение.
может иметь любое постоянное значение.
При
 равновесие системы нарушается. Таким
образом, интегрирующее звено может быть
использовано в системе астатического
регулирования.
равновесие системы нарушается. Таким
образом, интегрирующее звено может быть
использовано в системе астатического
регулирования.