

y |
0 |
= |
f |
0 |
(u, y, t) = G[u, y, t]; |
|
|
|
|
|
|||
y |
|
= |
f |
|
(u, y, t); |
|
1 |
|
1 |
|
|
||
. . . . . . . . . . |
||||||
y |
n |
= |
f |
n |
(u, y, t), |
|
|
|
|
|
|||
или в общем виде
yn = fi (u, y, t)
(i
=
0, ...,
n)
.
(8.39)
Важную переменные ψ
роль в
0 |
(t), , |
|
принципе максимума играют вспомогательные ψn ((t) и функция
H
n
= ψi (t) fi (u, i =0
y,
t)
.
(8.40)
Функции
Важно
определением
ψi (t) определяются из дифференциальных уравнений |
|||
dψi dt = −H yi |
(i = 0, ..., n) |
. |
(8.41) |
|
|
|
|
подчеркнуть, что уравнение (8.41) |
является |
||
функций ψi (t) , и на |
вопрос «Что такое |
функции |
|
ψ |
(t) |
i |
|
?» исчерпывающим
ответом будет: «Это функции, которые
удовлетворяют уравнению (8.41)».
H |
из (8.40), то получим |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
dψ |
i |
|
n |
|
f |
k |
|
|
= − |
ψk (t) |
|
|||
|
dt |
|
|
|
|||
|
|
k |
=0 |
|
|
|
|
|
|
|
|
|
|
||
Если в (8.41) подставить функцию
(u, |
y, t) |
(i = 0, ..., n) . |
(8.42) |
y |
|
||
|
|
|
|
i |
|
|
|
Это равенство можно использовать как иную формулировку определения функций ψi (t) .
Кстати, из (8.39) и (8.40) следует, что
dy |
dt = H ψ |
i |
(i = 0, |
|
i |
|
|
|
|
Действительно, так как |
H ψi = |
|||
..., fi ,
n
) .
то
(8.43)
уравнения (8.43)
эквивалентны уравнениям (8.39).
Если уравнения (8.43) и (8.41) записать совместно dψi  dt = − H
dt = − H  yi ;
yi ;
dyi  dt = H
dt = H  ψi ,
ψi ,
то можно заметить определенную симметрию в этой системе уравнений. Уравнения такого вида называют канонически сопряженными.
Теперь сформулируем основную теорему рассматриваемого метода (принцип максимума):
213

для оптимальности управления |
u(t) |
и |
траектории |
y(t) |
с |
|||
координатами соответственно |
u1 |
(t), ..., ur |
(t) |
и |
y1(t), ..., yr |
(t) |
||
необходимо существование такой ненулевой непрерывной функции
ψi (t) |
с координатами ψ0 |
(t), ..., ψn (t), соответствующей функциям |
||||
u(t) |
и y(t) в силу уравнений (8.42), что при любом t |
(t0 |
t T ) |
|||
функция |
H [ψ(t), y(t), u] |
переменного |
u достигает |
в |
точке |
|
u = u(t) максимума: |
|
|
|
|
||
|
|
H [ψ(t), y(t), u] = max |
u . |
|
|
|
Рассмотрим максимума его воздействием u(t
)
отличительную особенность вывода принципа авторами. Ограничимся одним управляющим
.
Как и экстремали
при
u(t)
выводе уравнения Эйлера, добавляется вариация
к
η(t)
предполагаемой
,вычисляется
соответствующая первая вариация функционала
δQ
и из равенства
этой вариации нулю выводятся необходимые условия оптимальности u(t) . Характерна форма вариации при выводе принципа максимума
(рис. 8.8). Это импульс в момент τ бесконечно малой длительности ε , но конечной, произвольной высоты u(τ) . Единственное условие,
которое наложено на величину
u(τ)
, – это требования ограничения
u(τ)
. Например, если
 u
u 
1
,
то −1 u(τ) +1. Вариация такого
вида названа игольчатой вариацией.
Рис. 8.8
Важно отметить, что игольчатая вариация существенно отличается от вариаций, с помощью которых выводится уравнение
214

Эйлера. Последние должны были представлять собой гладкие функции, в то время как игольчатая вариация является «скачкообразной». Использование скачкообразных вариаций позволяет включить в класс отыскиваемых экстремалей кусочнонепрерывные функции. А между тем, именно кусочно-непрерывные функции являются экстремалями во многих задачах оптимального управления, как это мы увидим из последующих примеров.
Прежде чем перейти к примерам, наметим план решения задачи
спомощью принципа максимума.
1.Записываем уравнения объекта в виде системы уравнений первого порядка (8.39), не забыв уравнения для функционала (8.38):
yi = fi (u,
2. Составляем функцию H
y, t)
:
(i
=
0, ...,
n)
.
H
n
= ψi (t) fi (u, i =0
y,
t)
.
3. Определяем значение
H
u =
, максимизирующее функцию
max |
u |
, ..., u |
. |
|
r |
||
|
1 |
|
H
:
(8.44)
4. Составляем уравнения (8.41) для определения ψi (t) :
dψi |
dt = −H yi (i = 0, ..., n) . |
|
||
Через функции |
ψi (t) |
выражается искомое |
оптимальное |
|
управление. |
|
|
|
|
Особенностью принципа максимума является то, что |
||||
вариационная задача нахождения функции |
u(t) |
доставляющей |
||
экстремум функционалу |
Q , заменена гораздо более простой задачей |
|||
математического анализа – задачей нахождения параметра u ,
доставляющего максимум вспомогательной функции |
H (u) . Отсюда |
понятно и название метода – принцип максимума. |
|
Пример 8.1. Решим с помощью принципа максимума задачу 8.1 об оптимальном по быстродействию управлении объектом с уравнением y = u при ограничении на управление u 1.
Решение. Составим систему уравнений первого порядка,
описывающих объект, вводя обозначения |
1 |
|
; |
|
2 |
= y |
: |
|
|
|
y |
= y |
|
y |
|
|
|
y1 = y2 , |
y2 = u . |
|
|
|
|
|
(8.45) |
|
215

Функционалом является длительность процесса
Q = T
=
T 1dt
0
,
поэтому дифференциальное уравнение для функционала вид
y0 =1.
(8.38) имеет
(8.46)
Добавляя (8.46) к (8.45), получим полную исходную систему уравнений объекта
y |
0 |
= 1; |
|
|
|
|
|
|
|
y |
|
= y |
2 |
; |
1 |
|
|
||
y |
2 |
= u. |
|
|
|
|
|
|
|
Составляем функцию
H
:
2
H = ψi fi i =0
= ψ |
0 |
1+ ψ y |
2 |
|
1 |
+ ψ |
u |
2 |
|
.
(8.47)
В (8.47) только последнее слагаемое
можно обеспечить максимальное значение |
H |
|||
|
|
|
|
|
этого слагаемого, т.е. необходимо, чтобы |
|
|||
ψ |
2 |
(t)u = max |
u 1 |
. |
|
|
|
||
зависит от , добившись
u , поэтому максимума
(8.48)
Значения u, максимизирующие (8.48), следует брать на
границах, т. е. |
u = +1 или u = −1. Очевидно, что при |
ψ |
2 |
(t) 0 |
следует |
|||||||
брать |
u = +1, |
а при |
ψ |
2 |
(t) 0 |
необходимо |
u = −1. |
Этот закон |
||||
|
|
|
|
|
|
|
|
|
|
|
||
управления можно записать с помощью функции sign :
u = sign |
2 |
(t) |
. |
|
|
Для определения функций ψi (t) составим
уравнения типа (8.41):
dψ0  dt = − H
dt = − H  y0 = 0; dψ1
y0 = 0; dψ1  dt = − H
dt = − H  y1 = 0; dψ2
y1 = 0; dψ2  dt = − H
dt = − H  y2 = −ψi .
y2 = −ψi .
(8.49)
дифференциальные
Решения этих уравнений имеют вид
ψ |
0 |
= const = C |
0 |
; |
|
|
|
ψ |
1 |
= const = C |
; |
||
|
|
|
1 |
|
|
ψ |
2 |
= C |
2 |
− C t. |
|
|
|
1 |
|
||
Подставляя (8.50) в (8.49), получим окончательно u = sign C2 − C1t) .
(8.50)
(8.51)
216

Так как функция
ψ |
2 |
= C |
2 |
− C t |
|
|
1 |
может менять знак не более
одного раза, то оптимальное управление (8.51) представляет собой кусочно-постоянную функцию, принимающую предельные значения
+ 1 |
или −1 |
и имеющую не более двух интервалов постоянства. |
Такое же решение было получено в разделе 8.3 при синтезе оптимальной системы.
На основе рассмотренного примера можно заметить, что
функцию |
y0 = f0 , а |
следовательно, ψ0 (t) |
можно |
не |
включать в |
||
выражение |
|
для |
H , |
если функционал не |
содержит |
в |
явном виде |
управления |
u , |
так как в этом случае слагаемое ψ0 f0 |
не влияет на |
||||
максимизацию
H
.
Пример 8.2. Рассмотрим задачу 8.6 об оптимальной по быстродействию встрече двух движущихся объектов. Закон сближения объектов описывается уравнением второго порядка (8.23) T x + x = u − b с начальными условиями (8.24), которые записываются
x(0) = −a;
x(0) =
−b
. Здесь
T
– постоянная времени управляемого
объекта; |
|
b |
– скорость движения неуправляемого объекта; |
a |
|
– |
||||||||
начальное рассогласование между объектами. Все три величины: |
T |
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b , a – заданные постоянные числа. |
|
|
|
|
|
|||||||||
Решение. Поскольку функционалом является время процесса, то |
||||||||||||||
уравнение |
x0 |
= f0 не включается в число уравнений задачи. |
|
|
|
|||||||||
Запишем систему |
уравнений типа (8.39), обозначив |
|||||||||||||
1 |
|
2 |
= x |
: |
|
|
|
|
|
|
|
|
|
|
x = x; |
x |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
x |
|
= x |
2 |
; |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
(8.52) |
||||
|
|
|
|
|
x |
|
= (1/ T )(−x |
|
+ u − b). |
|||||
|
|
|
|
|
2 |
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Составим функцию
H
:
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H = |
|
ψ |
i |
f |
i |
= ψ x |
2 |
+ ψ |
2 |
(1/ T )(−x |
2 |
+ u − b) = |
|
||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
i =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ψ1x2 − |
1 |
ψ2 x2 |
+ |
b |
ψ2u − |
b |
ψ2. |
(8.53) |
|||||||||
|
|
T |
T |
T |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
От управления u |
|
в (8.53) |
зависит только последнее слагаемое, |
||||||||||||||||
поэтому H = max |u| 1, |
|
|
когда |
|
|
1 |
ψ2u = max |u| 1 , откуда |
получаем |
|||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
||
очевидный закон управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
u = sign [ψ2 (t)]. |
|
|
|
(8.54) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
217 |

Составим дифференциальные уравнения для функций
dψ |
/ dt = − H / x |
= 0; |
1 |
1 |
|
ψ |
(t) |
i |
|
:
dψ |
2 |
/ dt = − H / x |
2 |
= −ψ |
+ (1/ T )ψ |
2 |
. |
|
|
1 |
|
|
|||
Из первого уравнения следует |
|
|
|
|
|||
|
|
ψ1 = const , |
|
|
(8.55) |
||
а из второго с учетом (8.55)
ψ |
2 |
(t) = C + |
|
1 |
Подставляя (8.56) в (8.54), оптимального управления
C2e |
t / T |
. |
(8.56) |
|
|||
запишем |
окончательно закон |
||
u = sign (C1 + C2e |
t / T |
) . |
|
На рис. 8.9 показаны графики функции сочетаний постоянных интегрирования: кривая
кривая 2 – для |
|
1 |
|
|
, |
|
2 |
|
; кривая 3 – для |
|
1 |
||||||
– для |
1 |
|
, |
|
C |
|
0 |
|
C |
|
0 |
|
|
C |
|||
|
|
|
2 |
|
|
. Как видно, функция |
|
2 |
|
||||||||
|
C |
0 |
|
C |
|
0 |
|
|
|
|
|
|
ψ |
|
(t) |
||
|
2 |
|
|
|
|
|
|
|
(8.57) |
|||
ψ |
(t) |
для различных |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
1 для |
|
C |
0 |
, |
C |
2 |
0 |
; |
||||
|
1 |
|
|
|
|
|||||||
0 |
, |
C |
2 |
|
0 |
и кривая 4 |
||||||
|
|
|
|
|
||||||||
не более одного раза
меняет знак, следовательно, оптимальное управление содержит не более двух интервалов постоянства.
Рис. 8.9 |
Рис. 8.10 |
Из физического смысла задачи (см. траектории объектов A и B на рис. 8.4, а ясно, что вначале управление должно обеспечить разгон объекта B , а затем его торможение. С учетом результата (8.57) и физического смысла задачи можно утверждать, что управление
должно состоять |
из |
двух интервалов (рис. 8.10): на первом для |
||||
0 t t1 |
u = +1, |
а |
на |
втором для |
t1 t t2 управление u = −1. |
|
Моменты |
переключения |
ti и окончания процесса сближения |
t2 |
|||
составляют неизвестные |
параметры |
закона управления. Для |
t t2 |
|||
218
движение объектов будет проходить одинаково, если положить u = b.
При этом, как следует из закона сближения объектов (8.23), |
x = x = 0 . |
Определим |
t1 и t2 |
, используя уравнения системы и граничные |
|
условия. Принимая за единицу времени постоянную T , т. е. вводя |
|||
нормированное |
время |
= t / T , перепишем |
дифференциальное |
уравнение (8.23) закона сближения |
|
||
|
|
dx2 / d + x2 = u − b . |
(8.58) |
Граничные условия примут вид
x1(0) = −a; |
x1(τ2 ) = 0; |
|
x2 (0) = −b; |
||||||
Подставляя для |
|
отрезка |
времени |
[0, τ1] |
|||||
(8.58), имеем |
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 |
+ x |
2 |
= 1 − b |
, |
|
|
|
|
|
|
|
|
|||
откуда |
|
|
|
|
|
|
|
|
|
x |
|
= (1 − b) + Ce |
−τ |
(0 τ |
|||||
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
x2 (τ2 ) = 0 .
управление
τ1) .
(8.59) u = +1 в
(8.60)
|
Постоянную C |
интегрирования найдем из начального условия |
||||||||||||||||||||||||
x2 |
= −b . Подставляя в (8.60) |
|
τ = 0 |
, получим |
|
C = −1, а закон изменения |
||||||||||||||||||||
x2 |
(τ) можно записать в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
x2 = (1 − b) − e |
−τ |
|
(0 τ |
τ1) . |
|
|
(8.61) |
||||||||||||||
|
Интегрируя |
|
|
|
условий |
|||||||||||||||||||||
|
(8.86), с учетом |
|
начальных» |
1 |
||||||||||||||||||||||
определим закон изменения |
|
|
1 |
|
|
на отрезке |
1 |
|
: |
x (0) = −a |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
x |
(τ) |
|
|
|
|
|
|
|
|
|
[0, τ ] |
|
|
||||
|
|
|
x1 |
(τ) = −(a +1) + (1 − b) + e |
−τ |
|
|
|
(0 τ τ1) . |
(8.62) |
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
|
Подставляя в уравнения (8.61) и |
|
|
|
(8.62) |
|
τ = τ |
вычислим |
||||||||||||||||||
|
|
|
|
|
1 , |
|||||||||||||||||||||
значения x |
(τ ) |
и x |
2 |
(τ |
2 |
) , являющиеся начальными условиями для |
||||||||||||||||||||
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
дифференциального |
|
уравнения |
|
|
движения |
на |
|
втором |
интервале |
|||||||||||||||||
τ |
τ τ |
2 , где u |
= −1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
x (τ ) = −(a +1) + (1 − b) + e−τ ; |
|
|||||||||||||||||||||
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
(8.63) |
|||||
|
|
|
|
|
|
(τ ) = (1 − b) − e−τ . |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
x |
2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Запишем уравнение движения для τ1 τ τ2 : |
|
(8.64) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
2 |
+ x |
2 |
= −(1 + b) |
. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Интегрируя (8.64) с учетом начальных условий (8.63), получим |
|||||||||||||||||||||||||
|
|
|
x2 (τ) = −(1 + b) + |
(2 − e |
−τ |
1 |
)e |
−(τ-τ |
|
) |
τ1 τ τ2. |
(8.65) |
||||||||||||||
|
|
|
|
|
|
1 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Закон изменения x1(τ1) |
|
для отрезка времени τ1 τ τ2 найдем, |
|||||||||||||||||||||||
проинтегрировав (8.65) с учетом начальных условий (8.63) |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
219 |
x |
(τ |
2 |
1 |
|
x1 По ) =
(τ) = (1 − a + условию
x2 (τ2 ) = 0 ,
2τ1) − (1 + b)τ − (2 − e |
−τ |
1 |
)e |
−(τ-τ |
) |
τ1 |
τ τ2. |
(8.66) |
|
1 |
|
||||||
|
|
|
|
|
|
|
||
задачи в момент окончания процесса |
||||||||
поэтому, подставляя |
|
в |
(8.65) и |
(8.66) |
τ = τ2 |
|||
получим систему уравнений для определения моментов времени
τ2 |
: |
− (1 + b) + (2 − e |
−τ |
|
)e |
−(τ |
|
-τ |
) |
= 0; |
|
1 |
|
2 |
1 |
|
|||
|
|
|
|
|
|
τ1
и
(1 − a + 2τ |
) − (1 + b)τ |
|
− (2 − e |
−τ |
1 )e |
−(τ |
|
-τ |
) |
= 0. |
2 |
|
|
2 |
1 |
|
|||||
1 |
|
|
|
|
|
|
|
|
|
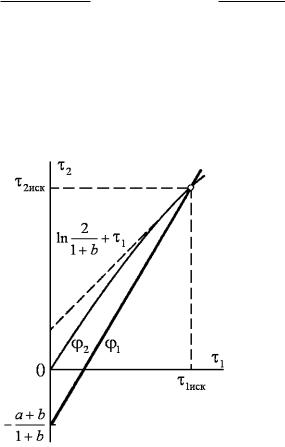
Путем несложных преобразований от этой системы уравнений можно перейти к другой более простой паре уравнений
τ2
=
|
|
|
|
|
|
2τ |
− a − b |
|
|
2 − e |
−τ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
τ2 |
= |
|
1 |
|
; |
τ2 = τ1 + ln |
|
|
. |
|
|
|
|
|
|
|
|
1 + b |
1 + b |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рассматривая |
эти |
уравнения |
как функции |
вида |
τ |
2 |
= |
|||||||||
|
|
|||||||||||||||
|
2 |
1 |
|
, можно построить на плоскости с координатами |
||||||||||||
|
|
(τ |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
(8.67)
1 |
|
1 |
|
и |
|
(τ |
) |
|
|
τ1 |
и |
τ2 |
||
соответствующие графики (рис. 8.11), определяет искомые моменты времени
точка пересечения которых и
τ1иск и τ2иск .
Рис. 8.11
8.6.Контрольные вопросы
1.Какую функцию называют кусочно-непрерывной?
2.Какие функции называют функционалами, а какие экстремалями?
220
3.Какие примеры постановки оптимального управления вы
знаете?
4.Какой вид имеет функционал при оптимальном быстродействии?
5.Что необходимо для реализации оптимального процесса в разомкнутой системе?
6.Что вы знаете о методе динамического программирования?
7.Назовите четыре основных метода в вариационном исчислении, используемых для решения задач оптимального управления?
8.Сформулируйте основную теорему принципа максимума.
9.Назовите план решения задачи с помощью принципа максимума.
10.Особенности применения принципа максимума.
221