

экзамен / Voprosy_k_ekzamenu
.docx
Экзамен
Физика
Физические основы механики.
Блок 1. Элементы кинематики.
1) Материальная точка – тело, размерами которого можно пренебречь.
2) Абсолютно твердое тело – механическая система, обладающая только поступательными и вращательными степенями свободы.
3) Поступательное движение – это движение твердого тела, при котором прямая, соединяющая две любые точки тела, остается параллельной самой себе.
4) Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
5) Тело отсчета – тело, относительно которого задается система отсчета.
6) Декартова система координат – это прямоугольная система координат, в которой единицы измерения по всем осям равны друг другу.
7) Цилиндрическая система координат – трехмерная система координат, являющаяся расширением полярной Системы координат путем добавления третьей координаты, которая задает высоту точки над плоскостью.
8) Сферическая система координат – используется для упрощения решения некоторых навигационных задач. Землю принимают за шар и пользуются сферическими координатами.
9) Естественная система координат – это оси подвижной прямоугольной системы координат с началом в движущейся точке.
10) Радиус вектор – это вектор, идущий из начала координат в эту точку (для произвольной точки).
11) Траектория – это линия которую описывает тело при движении относительно выбранного тела отсчета.
12) Перемещение – это самая короткая длина, измеренная от исходного положения до конечного положения движущегося тела.
13) Путь – это расстояние, которое прошло тело (длина траектории).
14) Средняя скорость – это скорости, определяемая отношением перемещения (S) при неравномерном движении к промежутку времени, за который это перемещение произошло.
15) Среднее ускорение – это отношение изменения скорости к промежутку времени, за который это изменении произошло.
16) Мгновенная скорость – скорость тела в данный момент времени или в данной точке траектории.
17) Мгновенное ускорение – физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю.
18) Векторный способ задания движения – заключается в задании положения точки радиусом-вектором, который является векторной функцией времени, относительно выбранной точки отсчета.
19) Координатный способ задания движения – основан на том, что положение точки относительно некоторой системы отсчета всегда может быть определено при помощи некоторой совокупности чисел, называемых ее координатами.
20) Естественный способ задания движения – состоит в том, что задаются:
- траектория движения;
- начало и положительное направления отсчета;
- закон движения точки по траектории.
21) Прямая задача кинематики – состоит в определении пространственного положения и ориентации характерной точки, как правило, рабочего инструмента манипулятора робота по известным значениям обобщенных координат.
22) Обратная задача кинематики – это вычисление углов по заданному положению рабочего органа и опять же известной схеме его кинематики. (обратная задача – как нужно «вывернуться» манипулятору, чтобы его рабочий орган оказался в заданном положении.
23) Путь при неравномерном движении – чтобы найти путь, надо среднюю скорость тела умножить на время его движения.
Блок 2. Динамика материальной точки.
1) Граница применимости классической механики – фундаментом классической механики служат экспериментальные факты, которые относятся к медленным движениям тел, обладающих макроскопическими размерами.
2) Первый закон Ньютона – существуют системы отсчета, называемые инерциальными, в которых любое тело находится в состоянии покоя или движется равномерно и прямолинейно, если на него не действуют другие тела или действие этих тел скомпенсировано.
3) Инерциальные системы отсчета – это система, в которой выполняется закон инерции если на тело не действуют внешние силы, то оно находится в состоянии покоя или прямолинейного равномерного движения.
4) Инертная масса - это масса, которая характеризует способность тела приобретать то или иное ускорение под действием приложенных к нему сил негравитационной природы.
5) Гравитационная масса - характеристика тел в классической механике, являющаяся мерой их гравитационного взаимодействия.
6) Принцип эквивалентности - состоит в том, что однотипные элементы можно заменять одним эквивалентным, при этом токи и напряжения в ветвях, не затронутых преобразованием, должны остаться неизменными.
7) Свойства массы - Масса характеризует два свойства тела: Инерция. Тело изменяет состояние своего движения только под воздействием внешней силы. Тяготение. Между телами действуют силы гравитационного притяжения. Эти свойства присущи не только телам, т.е. веществу, но и другим формам существования материи (например излучению, полям).
8) Сила - векторная физическая величина, которая является мерой взаимодействия тел и приводит к изменению скорости движения тел или их частей.
9) Свойства силы:
- изменение скорости или направления движения тела;
- изменение формы или размеров тела.
10) Правила подсчета сил, действующих на тело, в поле сил тяжести Земли – чтобы определить силу тяжести, действующую на тело, нужно постоянную для данной местности величину = 9,81 умножить на массу тела, выраженную в килограммах: Но притяжение существует не только между Землей и телами на ней или вблизи неё.
11) Импульс тела – векторная величина, равная произведению массы тела на скорость тела.
12) Второй закон Ньютона – в инерциальной система отсчета ускорение тела прямо пропорционально равно действующей сил, приложенных к телу и обратно пропорционально его массе.
13) Уравнения движения в различных системах координат - Дифференциальные уравнения движения материальной точки в теоретической механике - формулы и определения с примерами (evkova.org)
14) Прямая задача динамики - определение координат тела и его скорости в любой момент времени по известным начальным условиям и силам, действующим на тело. Для её решения необходимо знать координаты и скорость тела в некоторый начальный момент времени и силу, действующую на тело в любой последующий момент времени.
15) Обратная задача динамики - определение действующих на тело неизвестных сил по координатам тела в любой момент времени. Для её решения необходимо, исходя из координат, определить скорость и ускорение тела в любой последующий момент времени и, зная массу тела, на основе второго закона Ньютона, определить действующую на него силу.
16) Третий закон Ньютона – силы с которыми тела взаимодействуют друг с другом, равны по модулю и направлены вдоль одной прямой в противоположные стороны.
17) Принцип относительности Галилея – это принцип физического равноправия инерциальных систем отсчёта в классической механике, проявляющегося в том, что законы механики во всех таких системах одинаковы. Отсюда следует, что никакими механическими опытами, проводимыми в какой-либо инерциальной системе, нельзя определить, покоится ли данная система или движется равномерно и прямолинейно.
18) Преобразования Галилея – в классической механике (механике Ньютона) и нерелятивистской квантовой механике: преобразования координат и скорости при переходе от одной инерциальной системы отсчёта (ИСО) к другой.
19) Инварианты преобразования Галилея:
- Преобразования Галилея
x' = x - v*t
y' = y
z' = z
t' = t
Инвариантами являются размеры тела и течение времени.
- Преобразования Лоренца
(x - v*t)
x' = --------------
√(1 - v^2/c^2)
y' = y
z' = z
t - (v*x)/c^2
t' = ---------------
√(1 - v^2/c^2)
Инвариантом является пространственно-временной интервал, который равен
ds = √[c^2*(t'-t)^2 - (x'-x)^2 - (y'-y)^2 - (z'-z)^2]
Интервал - это промежуток между двумя событиями, учитывающий и расстояние между ними, и прошедшее время.
20) Привило сложения скоростей – скорость тела относительно неподвижной СО равна геометрической сумме скорости тела относительно подвижной СО и скорости подвижной СО относительно неподвижной СО.
21) Виды взаимодействий – сильное (1), электромагнитное (10^-2), слабое (10^-13), гравитационное (10^-40). Они перечислены в порядке убывания интенсивности. Интенсивность взаимодействия принято характеризовать так называемой константой взаимодействия альфа, которая представляет собой безразмерный параметр, определяющий вероятность процессов, обусловленных данным видом взаимодействия.
22) Фундаментальная сила – это притяжение или отталкивание между объектами, описанное посредством взаимодействий между полями и частицами.
23) Сухое трение – трение, возникающее при соприкосновении двух твердых тел при отсутствии между ними жидкой или газообразной прослойки. Силы сухого трения всегда направлены по касательной к соприкасающимся поверхностям. Сухое трение, возникающее при относительном покое тел, называют трением покоя.
24) Силы трения:
- покоя, сила действующая на тело со стороны соприкасающегося с ним другого тела вдоль поверхности соприкосновения тел, если тела покоятся относительно друг друга.
- скольжения, трение, возникающее при поступательном перемещении одного тела по поверхности другого.
- качения, сила трения качения возникает при условии, когда одно тело катится по поверхности другого.
25) Жидкое трение – называется трение между твердым телом и жидкой или газообразной средой или ее слоями.
26) Силы тяжести и вес – это сила, с которой Земля действует на тело, а вес – сила, с которой тело действует на опору. Это значит, что у них будут разные точки приложения: у силы тяжести к центру масс тела, а у веса – к опоре.
Блок 3. Закон сохранения импульса системы точечных тел.
1) Связь законов сохранения со свойствами пространства и времени – эти законы тесно связаны с основными свойствами пространства и времени. В основе закона сохранения энергии лежит однородность времени, т. е. равнозначность всех моментов времени (симметрия по отношению к сдвигу начала отсчета времени). Равнозначность следует понимать в том смысле, что замена момента времени t 1 на момент времени t 2, без изменения значений координат и скорости частиц, не изменяет механические свойства системы.
2) Однородность и изотропность пространства - однородность пространства и времени означает, что наблюдаемые физические свойства и явления должны быть одинаковы в любой точке пространства и в любой момент времени. Не существует выделенных в каком-либо отношении точек пространства и моментов времени. Изотропность пространства означает, что все направления в пространстве равнозначны. Физические явления в замкнутой системе не должны изменяться при ее повороте в пространстве.
3) Однородность времени – означает, что все моменты времени равноправны, то есть что если в два любые момента времени все тела замкнутой системы поставить в совершенно одинаковые условия, то начиная с этих моментов все явления в ней будут проходить совершенно одинаково.
4) Внутренние и внешние силы – внешними называются силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе. Внутренними называются силы взаимодействия между материальными точками (телами) рассматриваемой системы.
5) Замкнутая система – система тел, находящаяся на столь большом расстоянии от всех остальных тел Вселенной, что можно пренебречь их воздействием на тела рассматриваемой системы. Тела, входящие в замкнутую или изолированную систему, могут взаимодействовать только между собой и не могут взаимодействовать со всеми остальными телами Вселенной.
6) Закон изменения импульса в дифференциальной и интегральной формах:
- Теорема об изменении количества движения. в интегральной форме. Изменение количества движения (импульса) системы за некоторый промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени: Закон сохранения количества движения (импульса) Если сумма всех внешних сил, действующих на систему, равна нулю, то вектор количества движения системы будет постоянным.
7) Импульс силы – это временная характеристика действия силы, равная произведению силы и длительности ее действия.
8) Закон сохранения импульса – закон, утверждающий, что сумма импульсов всех тел системы есть величина постоянная, если векторная сумма внешних сил, действующих на систему тел, равна нулю.
9) Центр масс – воображаемая точка, положение которой характеризует распределение массы рассматриваемой системы.
10) Теорема о движении центра масс системы – одна из теорем динамики, следствие законов Ньютона. Утверждает, что ускорение центра масс системы не зависит от внутренних сил взаимодействия между телами системы, и связывает это ускорение с внешними силами, действующими на систему.
11) Ц-система – невращающаяся система отсчёта, связанная с центром масс механической системы.
12) Движение тела переменной массы – называется реактивным движением. Переменная масса – это масса тел, которая может меняться при медленных движениях из-за частичных приобретений или потерь составляющего вещества.
13) Уравнение Мещерского -

Блок 4. Закон сохранения полной механической энергии.
1) Элементарная работа силы – равна скалярному произведению вектора силы на вектор перемещения ее точки приложения.
2) Работа силы вдоль траектории – Работа силы вдоль какой-либо траектории, как это следует из ее определения, зависит, вообще говоря, от длины этой траектории, ее формы и значения вектора F в каждой ее точке (мы рассматриваем стационарные, т. е. не зависящие от времени, силы).
3) Графическое представление работы – Механическая работа. Мощность. | Объединение учителей Санкт-Петербурга (eduspb.com)
4) Мгновенная мощность – это скалярная физическая величина, равная отношению работы, выполненной за бесконечно малый промежуток времени, к величине этого промежутка.
5) Средняя мощность – это скалярная физическая величина N, равная отношению работы А, совершаемой силой, к промежутку времени, в течение которого она совершается: в СИ единицей мощности является ватт (Вт).
6) Кинетическая энергия – это энергия движения тела. Простейший пример - пуля. Пуля какой-то массы летит с какой - то скоростью. Врезавшись в какое - либо твердое тело она сдвинет его (или, возможно, пробьет) с большей вероятностью в том случае, если у нее больше скорость. E = mu^2 / 2
7) Теорема об изменении кинетической энергии - Согласно теореме об изменении кинетической энергии работа равна разности конечной и начальной кинетических энергий, при этом начальная кинетическая энергия равна 0, поскольку начальная скорость равна 0, и тогда: Следовательно, кинетическая энергия тела массой, движущегося со скоростью, равна работе, которую нужно совершить, чтобы сообщить телу эту скорость.
8) Консервативные силы – это силы, работа которых по любой замкнутой траектории равна нулю. ( это силы, работа которых не зависит от вида траектории, точки приложения этих сил и закона их движения, и определяется только начальным и конечным положением этой точки ).
9) Поле сил – это векторное поле в пространстве, в каждой точке которого на пробную частицу действует определённая по величине и направлению сила (вектор силы).
10) Потенциальная энергия – это энергия взаимодействия. Потенциальная энергия тела, поднятого над землей, определяется массой тела, ускорением свободного падения и расположением тела относительно земли. E = mgh
11) Потенциальная энергия поля сил:
- тяжести, она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень. В то же время она равна работе внешних сил на перемещение тела с нулевого уровня на требуемую высоту.
- упругости, это энергия, запасенная в результате приложения силы для деформации упругого объекта. Энергия сохраняется до тех пор, пока сила не будет снята, и объект не вернется к своей первоначальной форме, выполняя работу в процессе.
- центральных сил, сила, линия действия которой при любом положении тела, к которому она приложена, проходит через точку, называемую центром силы.
12) Связь потенциальной энергии и силы – Связь между потенциальной энергией и силой. Каждой точке потенциального поля соответствует одной стороны, некоторое значение вектора силы F, действующей на тело, с другой стороны, некоторое значение потенциальной энергии тела U. Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
13) Полная механическая энергия системы – это сумма кинетической и потенциальной энергий. Математически этот закон описывается так: Закон сохранения энергии Еполн.мех. = Еп + Eк = const Еполн.мех. — полная механическая энергия системы [Дж] Еп — потенциальная энергия [Дж] Ек — кинетическая энергия [Дж] const — постоянная величина.
14) Законы изменения и сохранения полной механической энергии:
- сохранения, сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и силами упругости, остается неизменной.
- изменения, изменение полной механической энергии системы тел равно работе внутренних диссипативных сил и внешних сил, действующих на систему.
15) Собственная энергия – тела, энергия тела, измеренная в собственной системе отсчета, т. е. в системе, в которой тело покоится. то же, что энергия покоя тела. равна Е0 = mcІ, где m — масса тела (масса покоя), c — скорость света в вакууме.
16) Консервативная система – физическая система, для которой все действующие на неё внешние и внутренние непотенциальные силы не совершают работы, а все потенциальные силы стационарны, все связи стационарны, силы не зависят от времени. Для такой системы верен закон сохранения энергии. Примером консервативной системы служит солнечная система.
17) Внутренняя механическая энергия системы – это сумма кинетической энергии хаотичного теплового движения молекул и потенциальной энергии их взаимодействия. То есть та энергия, которая запасена у тела за счет его собственных параметров. Часто механическая энергия переходит во внутреннюю.
18) Условие равновесия механической системы – механическая система будет находиться в равновесии, если на нее не будет действовать сила. Это условие необходимое, но недостаточное, так как система может при этом находиться в равномерном и прямолинейном движении.
19) Потенциальная яма – ограниченная область пространства с пониженной потенциальной энергией частицы. Потенциальная яма обычно отвечает короткодействующим силам притяжения. В области действия этих сил потенциал отрицателен, вне – нулевой.
20) Потенциальный барьер – область пространства, разделяющая две другие области с различными или одинаковыми потенциальными энергиями. Характеризуется «высотой» — минимальной энергией классической частицы, необходимой для преодоления барьера.
21) Импульс и энергия в Ц-системе:
- Полный импульс системы частиц в Ц-системе всегда равен нулю. Другими словами, любая система частиц как целое покоится в своей Ц-системе. Для замкнутой системы частиц ее Ц-система является инерциальной, для незамкнутой — в общем случае неинерциальной.
- Кинетическая энергия системы материальных точек равна сумме кинетической энергии всей массы системы, мысленно сосредоточенной в ее центре масс и движущейся вместе с ним, и кинетической энергии той же системы в ее относительном движении по отношению к поступательно движущейся системе координат с началом в центре масс.
22) Приведенная масса – называется условная масса, сосредоточенная в точке приведения, кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма в данном положении.
23) Абсолютно упругий удар – столкновение, при котором механическая энергия соударяющихся тел не преобразуется в другие виды энергии. В процессе такого удара тела деформируются, но деформации являются упругими.
24) Абсолютно неупругий удар – это столкновение двух тел, которые объединяются и движутся дальше как одно целое.
25) Центральный удар - центральным ударом тела о неподвижную преграду называют удар, при котором нормаль к поверхности преграды в точке соприкосновения проходит через центр масс тела.
Блок 5. Закон сохранения момента импульса.
1) Моменты импульса и силы относительно точки – называется вектор произведения радиус-вектора на силу. Моментом нескольких сил относительно точки называется сумма моментов этих сил относительно этой же точки. Моментом импульса материальной точки относительно точки называется вектор произведения радиус-вектора на импульс.
2) Плечо силы – это длина перпендикуляра, опущенного от оси вращения на линию действия силы.
3) Пара сил – это совокупность двух параллельных сил, равных по величине и противоположных по направлению, приложенных к одному твердому телу.
4) Моменты силы относительно оси – равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси и плоскости.
5) Моменты вертикальной, радиальной и тангенциальной составляющих силы относительно оси: Результирующий момент силы относительно оси равен моменту тангенциальной составляющей этой силы относительно точки оси, ближайшей к точке приложения силы. Только тангенциальная составляющая силы способна вызвать вращение тела вокруг закрепленной оси.
6) Моменты системы тел – моментом импульса механической системы относительно некоторого центра называется векторная величина, равная геометрической сумме моментов импульса относительно той же точки всех материальных точек системы.
7) Закон изменения момента импульса системы - скорость изменения момента импульса системы равна векторной сумме моментов внешних сил M, действующих на части этой системы. Причем вектора L и M задаются относительно одной и той же точки O в выбранной СО.
8) Закон сохранения момента импульса системы – один из фундаментальных законов сохранения. Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел, которая остается постоянной, пока на систему не воздействуют моменты внешних сил. В соответствии с этим момент импульса замкнутой системы в любой системе координат не изменяется со временем.
9) Собственный момент импульса – спин – собственный момент импульса элементарной частицы. Теперь вспомним, что такое момент импульса в классической механике. Момент импульса – это физическая величина, характеризующая вращательное движение, точнее, количество вращательного движения.
10) Движение в центральном поле сил – Движение материальной точки в поле любой центральной силы обладает набором общих свойств, не зависящих от конкретного вида этой силы, а именно:
1. Первыми интегралами движения являются полная механическая энергия и момент импульса.
2. Движение происходит в неподвижной плоскости, проходящей через силовой центр.
11) Законы Кеплера:
- Первый закон Кеплера. Каждая планета движется по эллипсу, в одном из фокусов которого находится Солнце.
- Второй закон Кеплера. Радиус-вектор планеты за равные промежутки времени описывает равновеликие площади.
- Третий закон Кеплера. Квадраты периодов обращений планет вокруг Солнца пропорциональны кубам больших полуосей их эллиптических орбит.
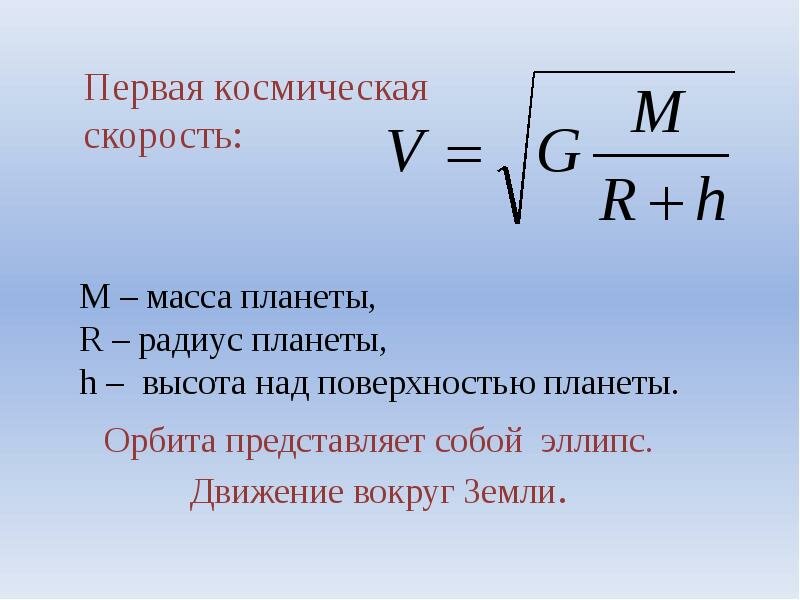
12) Космические скорости:
- Первая космическая скорость. Наименьшая начальная скорость, которую необходимо сообщить телу, чтобы оно стало искусственным спутником планеты.
- Вторая космическая скорость. Наименьшая начальная скорость, которую необходимо сообщить телу, чтобы оно смогло покинуть планету.
- Третья космическая скорость. Наименьшая начальная скорость, при которой тело преодолевает притяжение Земли, затем притяжение Солнца и покидает Солнечную систему.
Блок 6. Неинерциальные системы отсчета.
1) Силы инерции – это силы, обусловленные ускоренным движением системы отсчета, относительно измеряемой системы отсчета. Они не подчиняются третьему закону Ньютона.
2) Центробежная сила инерции – Fц = -mω2R – центробежная сила инерции, действующая на тело относительно вращающейся НСО. ω – угловая скорость НСО относительно ИСО, R - расстояние от тела до центра вращения.
3) Сила Кориолиса - то сила инерции, действующая перпендикулярно направлению движения движущегося тела в самой среде (системе отсчета) при равномерном вращении, как это видит наблюдатель, использующий ту же систему отсчета.
4) Уравнение второго закона Ньютона в неинерциальных системах - Для применения второго закона Ньютона в неинерциальных системах отсчета необходимо во всех формулировках, применимых к инерциальным системам отсчета, добавить к результирующей всех сил, приложенных к телу, еще и силу инерции, которая появляется в неинерциальной системе отсчета.
Тогда первая формулировка второго закона Ньютона будет выглядеть следующим образом:
![]() m
* a
m
* a
5) Закон сохранения в неинерциальных системах - § 35. Законы сохранения в неинерциальных системах отсчета (scask.ru)
6) Зависимость ускорения свободного падения от широты местности – Значение ускорения свободного падения зависит от географической широты местности. Это объясняется тем, что сила тяжести, действующая на данное тело на экваторе, меньше, чем сила тяжести, действующая на него на полюсе. Поэтому ускорение свободного падения на полюсе равно 9,83 м/с 2, а на экваторе — 9,78 м/с 2. Ускорение свободного падения зависит от высоты тела над поверхностью Земли.
Блок 7. Кинематика вращательного движения.
1) Вектор элементарного поворота – называется вектор d, модуль которого равен углу
d : |d | = d; этот вектор направлен вдоль оси вращения тела, при этом направление d связано правилом правого винта с направлением вращения тела. + Угловая скорость. Пусть тело, вращаясь вокруг оси Z, совершило за малый промежуток времени dt элементарный поворот d.