

3.5. Реакция модели при возбуждении ступенчатым возмущающем воздействии
Графики переходных процессов e(t) (оранжевый), у(t) (синий), х(t) (зеленый) при возбуждении системы ступенчатым возмущающем воздействии представлены на рисунке 15.
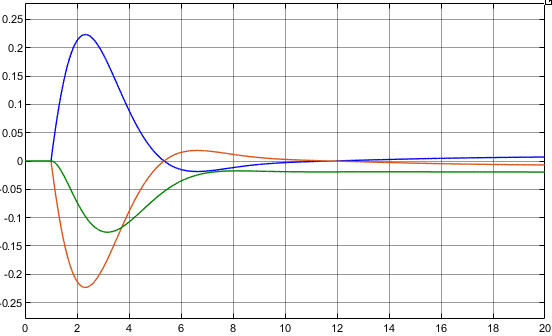
Рисунок 15 – Графики переходных процессов при возбуждении ступенчатым возмущающим воздействием.
Выпишем максимальные уровни и установившиеся уровни интересующих нас сигналов:
Выходной
сигнал:

Ошибки:

На входе
НЭ (в линейной модели Управляющее
воздействие):

4. Компьютерное моделирование Нелинейной су
4.1. Создание модели нелинейной системы управления
На данном этапе работы была использована модель и пункта 3.1, переключенная на использование нелинейного элемента. Нелинейным элементом в данной системе является заслонка (РО). Она имеет следующие параметры:
зона нечувствительности Δ=0.02ximax =0.0079;
насыщение xiнас=0.25ximax=0.09875.
Для реализации в компьютерной модели было изменено состояние свитча.
4.2. Реакция модели на различные задающие воздействия
Графики переходных процессов e(t) (оранжевый), у(t) (синий) при ступенчатом воздействии представлены на рисунке 16.
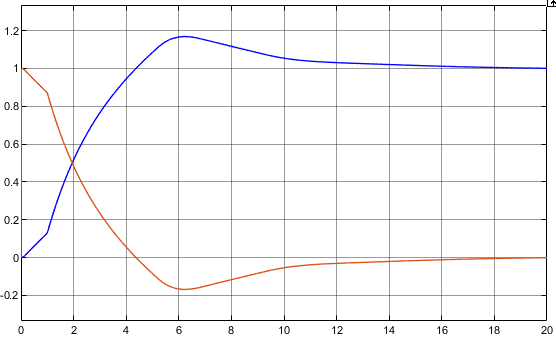
Рисунок 16 – Графики переходных процессов e(t), у(t) при ступенчатом воздействии
Выпишем максимальные уровни и установившиеся уровни интересующих нас сигналов, а также прямые показатели качества:
Выходной
сигнал:

Ошибки:

Время
переходного процесса:

Перерегулирование:
Графики переходных процессов e(t) (оранжевый), у(t) (синий) при возбуждении системы ступенчатым возмущающем воздействии представлены на рисунке 17.
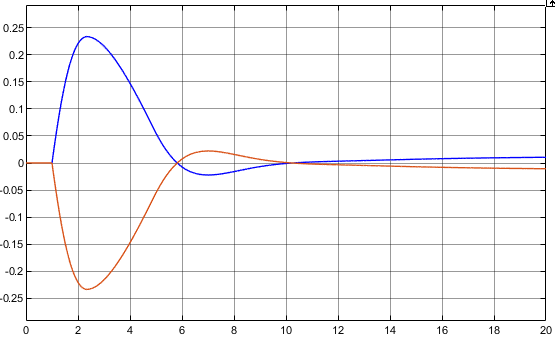
Рисунок 17 – Графики переходных процессов e(t), у(t) при возбуждении ступенчатым возмущающим воздействием.
Выпишем максимальные уровни и установившиеся уровни интересующих нас сигналов:
Выходной
сигнал:

Ошибки:

Проанализировав графики выше, можно сказать, что время переходного процесса и перерегулирование увеличились, но система исправно выполняет свои функции и остается устойчивой.
5. Моделирование системы с учетом запаздывания
5.1. Создание модели системы с учетом запаздывания
Для создания компьютерной модели с учетом запаздывания в ПО Simulink был использован блок Transport Delay. Модель системы с учетом запаздывания представлена на рисунке 18.
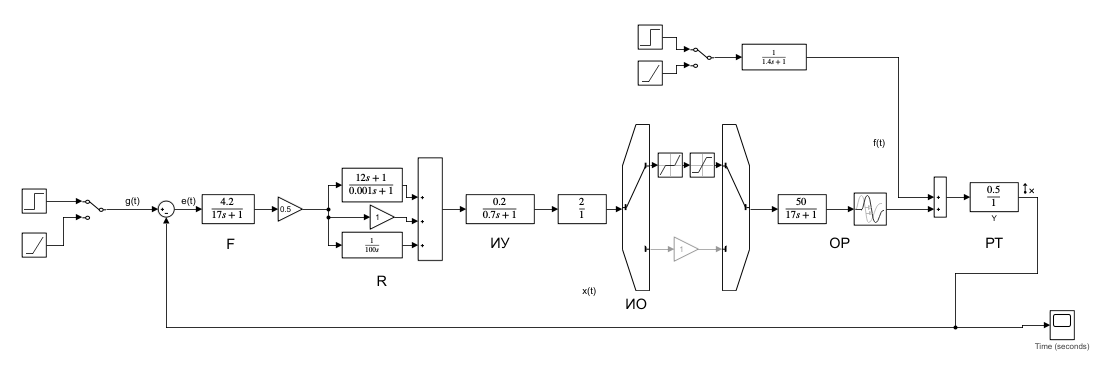
Рисунок 18 – Модель системы с учетом запаздывания
В реальной системе объект регулирования имеет время запаздывания τ0.
Найдем τ0кр, при котором система будет лежать на границе колебательной устойчивости:

Тогда используя эти данные критическое запаздывание:

Реакция системы на ступенчатое воздействие при τ0=τ0кр представлена на рисунке 20.
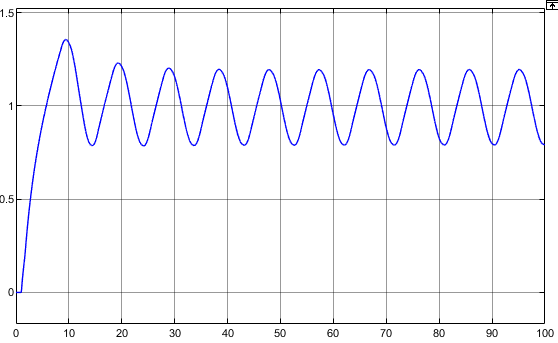
Рисунок 19 – Реакция системы на ступенчатое воздействие при τ0=τ0кр
На графике отчетливо видно, что система находится на границе устойчивости, что подтверждает, что вычисленное значение запаздывания является верным.
Заключение
В данном курсовом проекте был рассмотрен анализ системы автоматического регулирования разрежения газа в газопламенной печи. Были получены практические навыки расчета и использования типовых регуляторов. Было проведено исследование влияния вариаций значений параметров объекта управления на качественные показатели системы. В конце исследования в систему был введён нелинейный элемент с зонами нечуствительности и насыщения. В результате, показатели качества системы заметно ухудшились, но важно то, что она была по прежнему устойчивой. Аналогичная ситуация произошла и при введении запаздывания.