

Требования к сигналам на стыках цсп. Стандартные коды стыков (ami, hdb3, cmi).
ТРЕБОВАНИЯ
энергетический спектр сигнала должен быть как можно уже, в нем должна отсутствовать постоянная составляющая и должны быть ослаблены низкочастотная и высокочастотная составляющие. Последнее позволит ограничить полосу частот сигнала на входе регенератора и тем самым уменьшить мощность помех;
должна быть обеспечена высокая и почти постоянная плотность токовых импульсов. Это даст возможность обеспечить устойчивую работу системы тактовой синхронизации;
должна быть обеспечена возможность контроля достоверности передачи в процессе эксплуатации без перерывов связи;
уменьшение при необходимости тактовой частоты передаваемого сигнала по сравнению с исходным двоичным сигналом.
А вот с хера ли, об этом история умалчивает.
КОДЫ
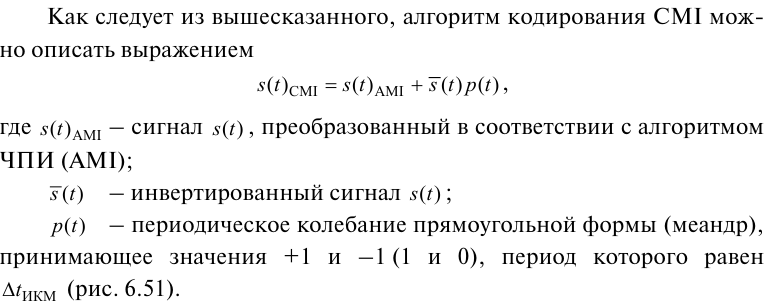
В существующих цифровых системах передачи, работающих по кабелям с медными жилами, применяют биполярные коды, которые предполагают использование для передачи сигнала импульсов как положительной, так и отрицательной полярности (чередование полярности импульсов ЧПИ), что позволяет устранить постоянную составляющую, а кроме того, в зависимости от алгоритма кодирования, ликвидировать длинные последовательности 0 и 1. Наиболее распространенными являются коды с основанием, равным трем, т. е. содержащие три разрешенных состояния: +1, 0 и –1. Такие коды, в зависимости от алгоритма кодирования, называют троичными или квазитроичными.
AMI
AMI (Alternate Mark Inversion), называемый также кодом с чередованием полярности импульсов ЧПИ. В соответствии с алгоритмом кодирования нули передаются без изменений (0→0), а логическая 1 преобразуется в +1 или –1 с использованием принципа чередования полярности, т. е. каждый последующий импульс исходной двоичной последовательности преобразуется в импульс, полярность которого противоположна полярности предыдущего импульса.
Поскольку в данном случае два разрешенных состояния (+1 и –1) используются для передачи одного и того же значения (1), т. е. AMI представляет собой код класса 1B1T, то тактовая частота в результате преобразования кода не изменяется, а поэтому AMI называют квазитроичным кодом.
Нетрудно видеть, что использование кода AMI позволяет устранить постоянную составляющую в спектре сигнала, а кроме того, ликвидировать длинные последовательности единиц. Помимо этого, появляется возможность контроля линейного тракта в процессе эксплуатации по нарушению чередования полярности импульсов (два последовательно однополярных импульсов - ошибка). Однако применение кода AMI не решает проблему увеличения плотности единиц, поскольку в результате кодирования в сигнале сохраняется такое число последовательных нулей, как и в двоичном сигнале. Данное обстоятельство является основным недостатком кода AMI. Следует также заметить, что в спектре сигнала с ЧПИ отсутствует тактовая частота, а максимум энергии приходится на ее субгармоники. Поэтому при выделении тактовой частоты в ВТЧ сигнал сначала подвергается нелинейному преобразованию с помощью выпрямителя, а затем уже из выпрямленного сигнала выделяется тактовое колебание. Согласно международным стандартам код AMI рекомендован к использованию лишь на первых ступенях PDH при передаче сигналов со скоростями 64 кбит/с и 1544 кбит/с.
HDB3
Наиболее распространенным является код HDB-3, который также называют модернизированным ЧПИ (МЧПИ). В соответствии с алгоритмом кодирования, нули в общем случае передаются без изменений (0→0), а единицы преобразуются в +1 или –1 с использованием принципа ЧПИ. Помимо этого, комбинации из четырех нулей заменяются на комбинации вида B00V и 000V, где B – импульс (+1 или –1), полярность которого противоположна полярности предыдущего импульса, а V – импульс (+1 или –1), имеющий ту же полярность, что и предыдущий импульс. Так, в комбинации B00V импульс V будет иметь ту же полярность, что и B. Выбор одной из этих комбинаций осуществляется по следующему правилу: после каждой замены, т. е. после каждого импульса V, начинается подсчет единиц в сигнале, и если к моменту следующей замены поступило нечетное число единиц, то для замены выбирается комбинация 000V, а если четное – B00V. Таким образом, между двумя соседними V должно быть нечетное число единиц. Нетрудно видеть, что подобные замены нарушают чередование полярности импульсов (этот признак используется для обнаружения замен при декодировании на приемной стороне). Это обстоятельство может привести к нарушению баланса между +1 и –1 и к появлению в спектре сигнала постоянной составляющей. Использование для замены двух данных комбинаций в соответствии с указанным правилом выбора позволяет обеспечить баланс между +1 и –1 и тем самым не допустить появление постоянной составляющей.
Как и в случае применения кода AMI, в спектре сигнала, преобразованного в соответствии с алгоритмом кода HDB-3, отсутствуют постоянная составляющая и тактовая частота, а максимум энергии приходится на полутактовую частоту (ωт 2). Энергетический спектр последовательности в коде HDB-3 при равных вероятностях 0 и 1 в исходной двоичной последовательности представлен на рис. 6.50.
Согласно международным стандартам, код HDB-3 рекомендован к использованию в первичной, вторичной и третичной ЦСП европейской иерархии , т. е. при передаче сигналов со скоростями 2048 кбит/с, 8448 кбит/с и 34368 кбит/с.
CMI
(СМI – Coded Mark Inversion). В CMI, согласно алгоритму кодирования, нули передаются биимпульсным сигналом, т. е. нулю соответствует пара символов –1, +1 (либо пара 0, 1 в случае использования однополярных импульсов, например, при передаче по волоконно-оптическим линиям связи). Единицы в коде CMI преобразуются в импульсы без возврата к нулю (NRZ) с полярностью, противоположной полярности импульса, который соответствовал предыдущей единице. Иными словами, логическая 1 преобразуется в +1 или –1 с использованием принципа чередования полярности (при использовании однополярных импульсов единица передается как 0 или 1 также с применением принципа чередования). Основной недостатк кода CMI: его чувствительность к ошибкам больше (на 3 дБ), чем абсолютного биимпульсного сигнала.
Объединение цифровых потоков. Классификация способов объединения. Плезиохронное объединение цифровых потоков. Цифровое выравнивание.
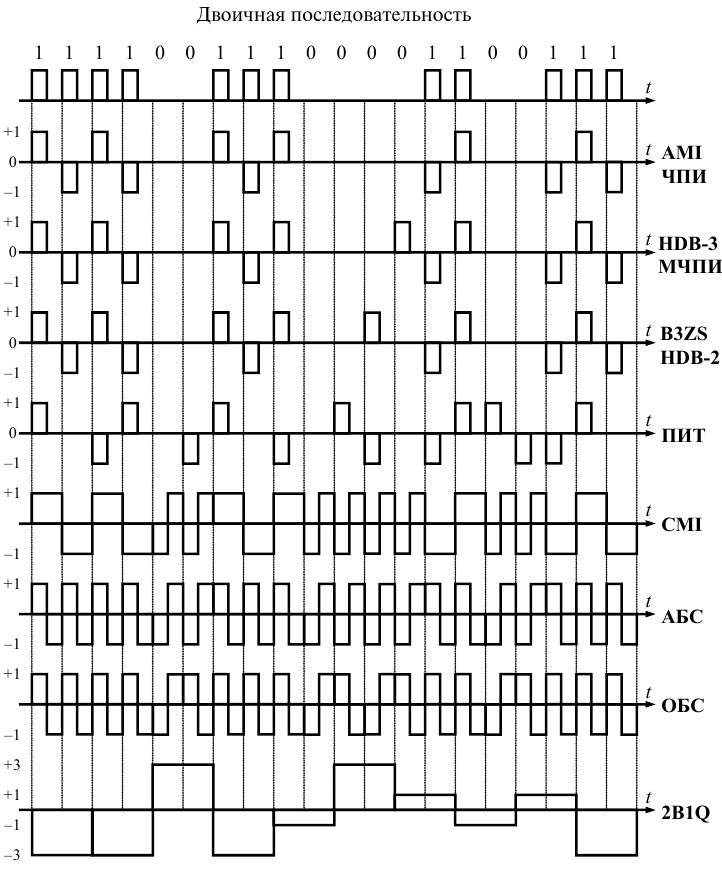
Как было показано в п. 6.1, формирование агрегатного сигнала на второй и последующих ступенях плезиохронной иерархии осуществляется путем объединения цифровых потоков систем более низкого порядка. При этом возможны различные способы объединения компонентных сигналов. А именно, посимвольный (поразрядный или побитовый); поканальный (по кодовым группам каналов или побайтовый); посистемный (по циклам объединяемых потоков). Данный ряд может быть продолжен
Наиболее
простым, экономичным и широко применяемым
способом является поразрядное объединение.
При использовании данного метода
формирование группового сигнала
производится путем периодического
чередования битов поступающих компонентных
потоков, т. е. импульсы объединяемых
цифровых сигналов укорачиваются и
распределяются во времени так, чтобы в
освободившихся интервалах могли
разместиться вводимые импульсы других
систем, а также различные служебные
сигналы, в частности, сигнал синхронизации
(рис. 6.9).
Вторая классификация способов объединения предусматривает два варианта – сопряжение цифровых потоков может быть синхронным и асинхронным. При синхронном объединении задающие генераторы источников компонентных сигналов и аппаратуры временного группообразования синхронизированы между собой, а следовательно, частоты генераторов, с учетом их нестабильности, будут меняться согласованно.
При асинхронном сопряжении задающие генераторы работают независимо, и отклонения их частот от номинальных значений не связаны между собой.
Как правило, в аппаратуре временного группообразования ЦСП PDH используется асинхронное мультиплексирование. Это связано с тем, что источники компонентных сигналов часто располагаются не в одном месте (в отличие от рассмотренного выше случая формирования первичного цифрового потока 2048 кбит/с), а на значительных расстояниях друг от друга, и поэтому осуществить их синхронизацию достаточно трудно.
Так как компонентные сигналы поступают одновременно, и используется асинхронное сопряжение, а в основе процесса мультиплексирования лежит принцип временного разделения, то при объединении цифровые потоки записываются в запоминающее устройство (ЗУ), а затем считываются, образуя групповой цифровой поток. Исходя из этого, как раз и становится очевидным тот факт, что наиболее экономичным, с точки зрения требуемого объема памяти, является поразрядное объединение.
Каждый компонентный сигнал записывается в отдельное ЗУ с частотой записи fзап, которая соответствует тактовой частоте данного сигнала, а считывается с частотой fсч, определяемой скоростью агрегатного потока. Таким образом, при асинхронном сопряжении частоты записи компонентных потоков различны, а частота считывания одинакова для всех потоков.

Следует заметить, что передача служебной информации на позициях временных сдвигов накладывает ограничение на выбор структуры цикла, так как требует, чтобы все служебные сигналы носили распределенный характер, т. е. были бы равномерно распределены в цикле. Устранить данное ограничение, а следовательно, обеспечить передачу как распределенных, так и сосредоточенных служебных сигналов, можно путем наращивания количества ячеек памяти в ЗУ (в реальных системах обычно используют ЗУ объемом 5 или 7 ячеек памяти, что обусловлено, помимо указанной, еще рядом причин, речь о которых пойдет ниже). Увеличение объема памяти позволяет обеспечить такой режим работы механизма запись/считывание, когда запись в данную ячейку опережает на несколько тактов (Tсч) считывание из этой ячейки, поэтому, при возникновении временного сдвига, опустошения памяти не происходит. В связи с этим, появляется возможность накапливать, а затем компенсировать сразу несколько временных сдвигов, что как раз и решает проблему передачи сосредоточенных служебных сигналов.
Формально суть данного метода заключается в выравнивании количества корректно записанных и считанных символов между соседними временны́ми сдвигами. При этом под операцией выравнивания понимают следующее: если число символов между сдвигами меньше некоторого требуемого значения R = П[ fзап. н /(fсч. н − fзап. н)], то необходимо добавить символ, если больше, то изъять. Таким образом, после выполнения выравнивания временны́е сдвиги будут следовать периодически, а все неоднородности будут устранены.