

8.2 Пердаточные функции и характеристики оптимальных сар
8.2.1. Оптимальные передаточные фунции сар
Рассмотренные выше соображения позволяют определить передаточные функции разомкнутых и замкнутых контуров регулирования при любом порядке объекта регулирования. Обозначим:
i-номер контура регулирования;
n =i +1 - порядок объекта регулирования.
В этом случае получим для передаточных функций оптимальных разомкнутого и замкнутого контуров следующие выражения:
![]()
![]()
В зависимости от порядка регулирования имеем:
1)
i=
0,
n
= 1
![]() ,
(8.12)
,
(8.12)
т.е. имеем объект с передаточной функцией инерционного звена первого порядка - фильтр.
2)i = 1,n = 2 (первый контур регулирования, объект регулирования второго порядка)
![]() (8.13)
(8.13)
![]() (8.14)
(8.14)
3) i= 2, n = 3 (второй контур регулирования, объект регулирования третьего порядка)
![]() (8.15)
(8.15)
![]() (8.16)
(8.16)
4) i = 3, n = 4 (третий контур регулирования, объект регулирования четвертого порядка)
![]() .
(8.17)
.
(8.17)
 (8.18)
(8.18)
Аналогично можно записать выражения передаточных функций для систем более высокого порядка.
Можно
показать, что при
![]() внутренний, по отношению к рассматриваемому,
контур (колебательное звено) может быть
представлен апериодическим звеном с
периодической функцией
внутренний, по отношению к рассматриваемому,
контур (колебательное звено) может быть
представлен апериодическим звеном с
периодической функцией![]() (8.19)
(8.19)
В
этом случае для i-го
контура регулирования можно записать
при стандартной настройке, т.е. при
![]()
![]() (8.20)
(8.20)
![]() (8.21)
(8.21)
Следовательно,
с увеличением номера контура регулирования
постоянная времени, не компенсируемая
регулятором, возрастает в
![]() раз по сравнению с этой постоянной
времени
раз по сравнению с этой постоянной
времени![]() для первого контура. В результате
быстродействие контура снижается в
для первого контура. В результате
быстродействие контура снижается в![]() раз (
раз (![]() ).
).
8.2.2. Переходные функции оптимальных cаp
Переходные функции оптимальных САР зависят от порядка объекта регулирования и номера контура регулирования.
1)i = 0, n = 1.
![]() ;
;
![]() ;
;
![]() ,
,
т.е. переходный процесс соответствует апериодическому звену первого порядка (рис. 8.7).
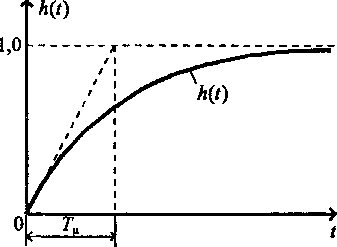
Рис. 8.7. Переходной процесс системы первого порядка
2) i=1, n=2.
Характеристическое уравнение
![]() (8.22)
(8.22)
Или
![]() .
.
Где
![]() ;
;![]()
Корни характеристического уравнения
![]() .
.
При ступенчатом воздействии на вход оптимальной системы второго порядка переходный процесс будет описываться следующим уравнением:
![]() (8.23)
(8.23)
Кривая переходного процесса представлена на рис.8.8.
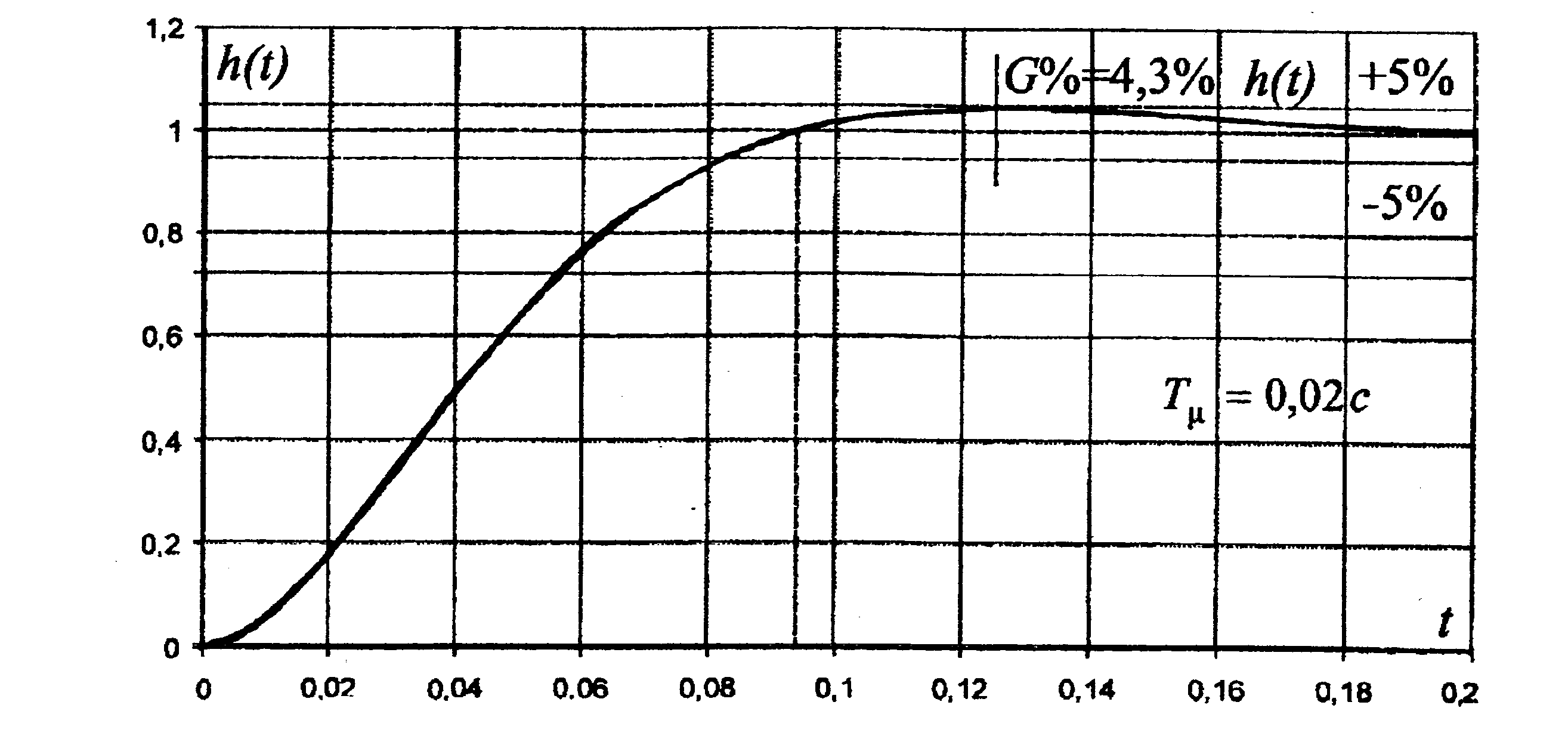
Рис. 8.8. Кривая переходного процесса при модульном оптимуме
Переходная функция характеризуется следующими показателями:
![]() =
4,3 % - перерегулирование;
=
4,3 % - перерегулирование;
![]() =4,7
=4,7![]() -время первого достижения установившегося
значения;
-время первого достижения установившегося
значения;
![]() -
время достижения максимума;
-
время достижения максимума;
![]() -время
переходного процесса (вхождение в 2%
зону ошибки).
-время
переходного процесса (вхождение в 2%
зону ошибки).
Быстродействие
контура определяется временем
![]() соответствующим
моменту, когда регулируемая величина
первый раз достигает установившегося
значения. Из кривых (рис. 8.9) видно, что
при снижении а возрастает колебательность
процесса и его перерегулирование.
Выбирая коэффициент а в пределах а= 1
соответствующим
моменту, когда регулируемая величина
первый раз достигает установившегося
значения. Из кривых (рис. 8.9) видно, что
при снижении а возрастает колебательность
процесса и его перерегулирование.
Выбирая коэффициент а в пределах а= 1![]() 4
можно получить любой желаемый переходный
процесс с заданными оптимальными
показателями. Поэтому рассмотренный
метод коррекции называют методом
оптимизации контура регулирования по
быстродействию. Такая настройка контура
регулирования (системы второго порядка)
не является предельной ни по быстродействию
(время
4
можно получить любой желаемый переходный
процесс с заданными оптимальными
показателями. Поэтому рассмотренный
метод коррекции называют методом
оптимизации контура регулирования по
быстродействию. Такая настройка контура
регулирования (системы второго порядка)
не является предельной ни по быстродействию
(время![]() можно уменьшить, уменьшая
можно уменьшить, уменьшая![]() ),
ни по перерегулированию, которое можно
уменьшить либо вообще исключить ценой
снижения быстродействия. Однако в
большинстве технических случаев она
удовлетворяет практическим требованиям.
Благодаря простоте реализации оптимизация
по модульному оптимуму стала наиболее
распространенным методом оптимальной
настройки систем регулирования.
),
ни по перерегулированию, которое можно
уменьшить либо вообще исключить ценой
снижения быстродействия. Однако в
большинстве технических случаев она
удовлетворяет практическим требованиям.
Благодаря простоте реализации оптимизация
по модульному оптимуму стала наиболее
распространенным методом оптимальной
настройки систем регулирования.

Рис. 8.9. Переходные функции замкнутого контура при различных значениях
коэффициента а
3) i = 2, n= 3.
Характеристическое уравнение имеет вид
![]()
Корни характеристического уравнения
![]()
Переходная функция системы, полученная на основании обратного преобразования Лапласа, будет определена выражением
![]() (8.24)
(8.24)
или в относительных единицах
![]() ,
(8.25)
,
(8.25)
где
![]() -
относительное время.
-
относительное время.
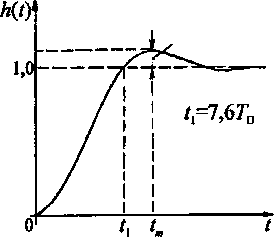
Рис. 8.10. Переходный процесс в оптимальной системе третьего порядка
Графическое
изображение переходной функции
системы третьего порядка представлено
на рис. 8.10. Можно сказать, что для систем
четвертого и более высоких порядков
величина перерегулирования практически
изменяется незначительно и составляет
величину, равную
![]() =8,1% (см. рис. 8.10). Однако время регулирования
при повышении порядка на единицу
возрастает приблизительно в 2 раза,
соответственно быстродействие
уменьшается в 2 раза.
=8,1% (см. рис. 8.10). Однако время регулирования
при повышении порядка на единицу
возрастает приблизительно в 2 раза,
соответственно быстродействие
уменьшается в 2 раза.