


Длина отрезка , соответствующая величине вектора давления в шарнире В, равна
Р32 115 ,6 мм
Величина усилия с учетом масштаба равна
Р32 |
|
Р32 |
|
kP 115.6 20 2312 Н |
|
|
|
Р2' |
|
" |
|
|
|
|
|
|
|
|
|
Ру |
|
|
|
|
|
|
60 0 |
А |
S1 |
|
|
P2и |
|
|
|
|
|
Р1и |
|
|
S2 М2 |
и |
|
|
|
|
|
G1 |
1 |
О |
|
2 |
P43 |
3 |
|
|
|
' |
|
|
е |
G2 |
|
|
|
|
|
Ру |
|
|
|
|
|
|
P |
|
План |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P и |
|
|
|
ускорений |
|
4 |
|
|
|
|
3 |
В |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
4 |
P2" |
|
||
|
|
в |
|
|
|
G2 |
|
||
|
|
|
|
|
|
|
|
π
 s2
s2
4
Р21 |
Ру" |
60 0 |
А |
S1 |
|
Р1и |
|
|
G1 |
1 О |
|
Ру' |
|
4
а
nBA
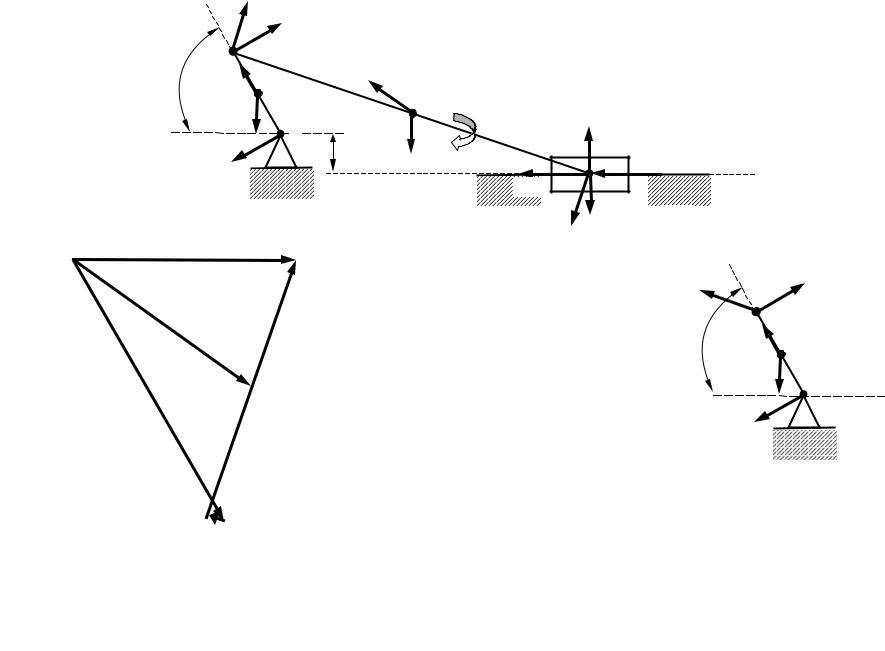
Составляем уравнение моментов относительно точки О по методу
кинетостатики.
Р у ОА G1 h1 P21 h21 0
Величины плеч сил в расчетном уравнении берем с чертежа группы [ 4 – 1 ].
|
h21 16.3 мм |
|
h1 6.5 мм |
|
Pу |
G1 h1 P21 h21 |
|
19.6 6.5 2827 16.3 |
1848.3 H |
|
OA |
|
25 |
|
Удерживающий момент составит
М у Р у l1 1848.3 0.1 184.8 Hм
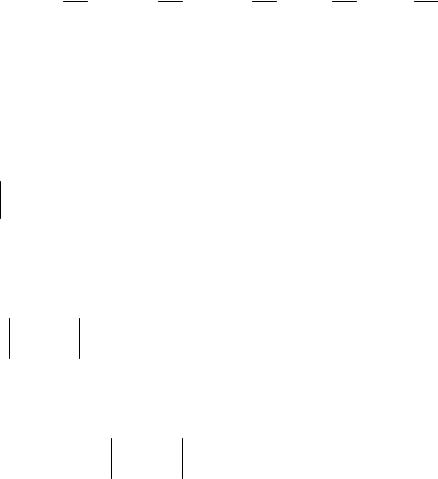
Определим усилие в шарнире О из условия динамического равновесия звена 1.
P1i P 21 G1 P1и Р41 0
Строим векторный многоугольник. Размеры отрезков, соответствующие в масштабе величине векторов, будут равны:
Р21 |
|
141,4 мм |
|
G1 |
|
1 мм |
|
Р1и |
|
8 мм |
|
|
|
|
|
||||||
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Отрезок, соответствующий величине вектора
Р41 , равен
Р41 147 ,3 мм
Величина вектора Р41 с учетом масштаба равна
Р41 Р41 kP 147.3 20 2946 H
|
Р2' |
|
" |
|
|
|
|
|
|
|
|
|
Ру |
|
|
|
|
|
|
60 0 |
А |
S1 |
|
|
P2и |
|
|
|
|
|
Р1и |
|
|
S2 М2 |
и |
|
|
|
|
|
G1 |
1 |
О |
|
2 |
P43 |
3 |
|
|
|
' |
|
|
е |
G2 |
|
|
|
|
|
Ру |
|
|
|
|
|
|
P |
|
План |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P и |
|
|
|
ускорений |
|
4 |
|
|
|
|
3 |
В |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
4 |
P2" |
|
||
|
|
в |
|
|
|
G2 |
|
||
|
|
|
|
|
|
|
|
4
Р21 |
Ру" |
π |
|
|
А |
||
|
60 0 |
|
|||
|
|
|
Р1и |
||
s2 |
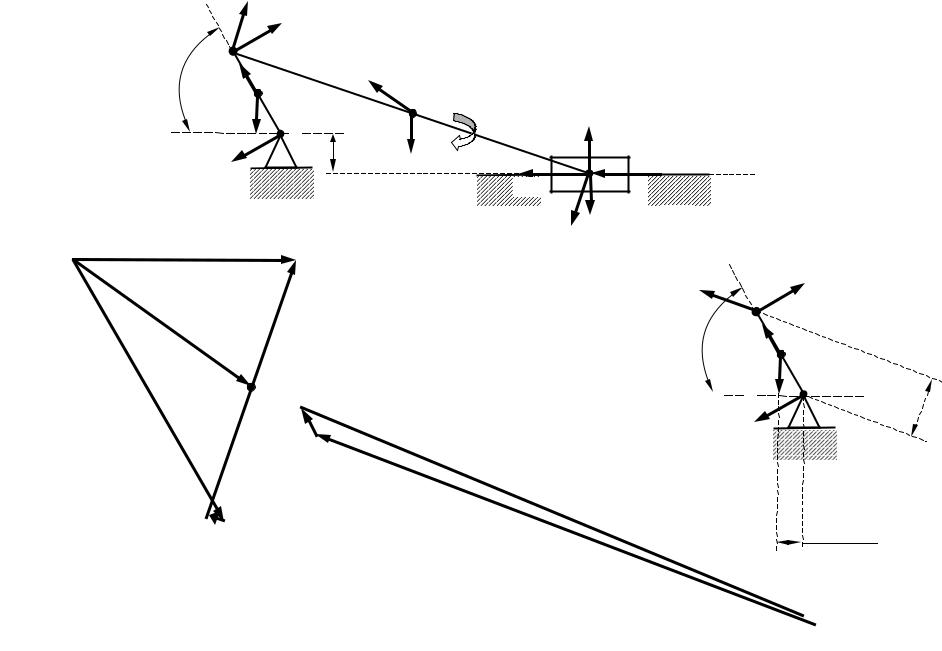
Силовой |
|
G1 |
||
многоугольник |
|
Ру' |
|
|
|
Р1и |
|
||||
звена 1 |
4 |
|
|||
|
|
|
|||
S1 |
|
1 О |
h21 |
|
|
а |
Р41 |
|
nBA |
h1 |
||
|
|||
|
|
Р21 |
 G1
G1
|
|
Р2' |
|
" |
|
|
|
|
|
Ру |
|
60 |
0 |
А |
|
|
P и |
|
и |
S1 |
|
2 |
|
|
|
|
S2 |
||
|
|
Р1 |
1 |
|
|
|
|
G1 |
О |
G2 |
|
|
|
' |
|
е |
|
|
|
Ру |
|
|
|
4 |
|
|
a |
P2и |
G3 P " |
|
Р " |
s2 |
||
|
|
2 |
|
у |
|
|
P и |
|
|
|
|
|
|
|
3 |
Р2' |
G2 |
в |
|
|
Р1и |
h |
" |
|
|
2 |
|
М и |
|
|
|
2 |
|
|
|
2 |
P43 |
3 |
|
|
|
P |
|
|
P и |
|
|
|
3 |
В |
|
4 |
P " |
4 |
|
|
2 |
G3 |
|
|
|
|
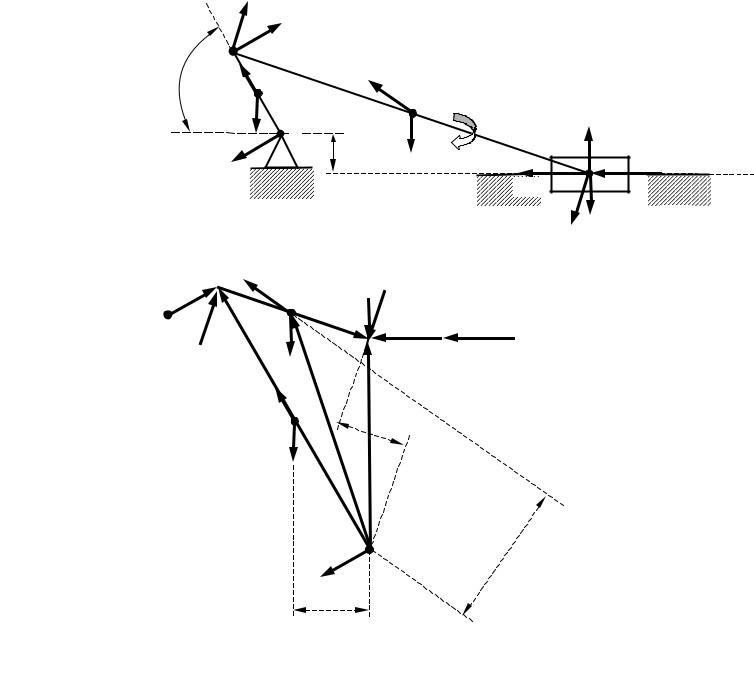
План скоростей P (перевернутый)
G1
Р |
' |
h и |
у |
p |
|
|
2 |
|
|
|
h1
Вычерчиваем кинематическую схему механизма с учетом всех сил, включая силы инерции. Вычерчиваем план скоростей, повернутый на 90 0, и в соответствующие точки переносим все силы Записываем уравнение динамического равновесия моментов всех сил относительно полюса « р ».
Pу ра G1 h1 G2 h2 P2и h2иР3и Р рb P2 ab P2 h2 0
Величины плеч берем с чертежа
h1 h2 20 мм h2и 38 мм h2 18.8 мм
|
|
G1 h1 G2 h2 Р2и h2и Р3и Р рb Р2 ab Р2 h2 |
Ру |
pa |
|
|
|
Р у 1825,4 Н
Удерживающий момент равен
М у Р у l1 1825.4 0.1 182.54 Нм
Ошибк
а
184,8 182,54 100% 1,2%
184,8