

6.2 Синтез структурной схемы двухконтурной системы поддержания натяжения полотна.
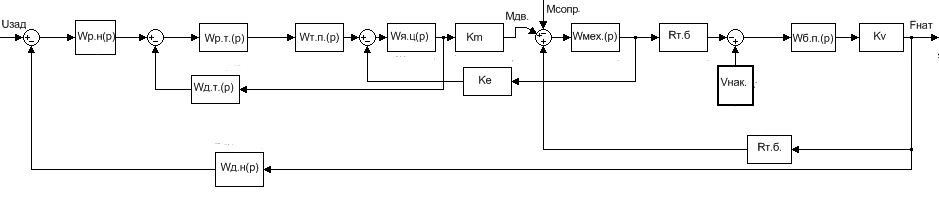
Рис 12.Структурная схема двухконтурной системы поддержания натяжения полотна.
6.1 Расчет параметров структурной схемы контура тока.
В
контур тока рассматриваемой системы
входят регулятор тока, тиристорный
преобразователь, якорная цепь двигателя
и датчик тока. Максимальное задание,
подаваемое на регулятор, примем равным
![]() .
.
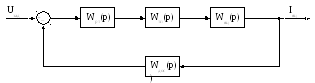
Рис.12 Структурная схема контура тока.
На рисунке изображено построение структурной схемы контура тока якорной цепи для проектируемой нами модели.
6.1.1 Расчет параметров передаточной функции тиристорного преобразователя.
Так как тиристор представляет собой не полностью управляемый полупроводниковый прибор, то тиристорный преобразователь математически описывается как нелинейное звено с запаздыванием. Однако, при моделировании многих электроприводов, в том числе и электроприводов бумагоделательных машин, передаточную функцию тиристорного преобразователя можно представить апериодическим звеном первого порядка
![]()
![]() (54)
(54)
где Ктп – передаточный коэффициент тиристорного преобразователя
Eтпmax – среднее значение ЭДС преобразователя при угле управления равном нулю
Ттп – постоянная времени тиристорного преобразователя.
![]()
Постоянная времени равна:
![]() ,
(55)
,
(55)
где τсц – постоянная времени, учитывающая запаздывание в силовой цепи тиристорного преобразователя.
Значение τсц принимается равным длительности импульса выпрямленного напряжения. Для трехфазной мостовой схемы τсц = 0.0033 с.
Передаточная функция преобразователя примет вид:
![]()
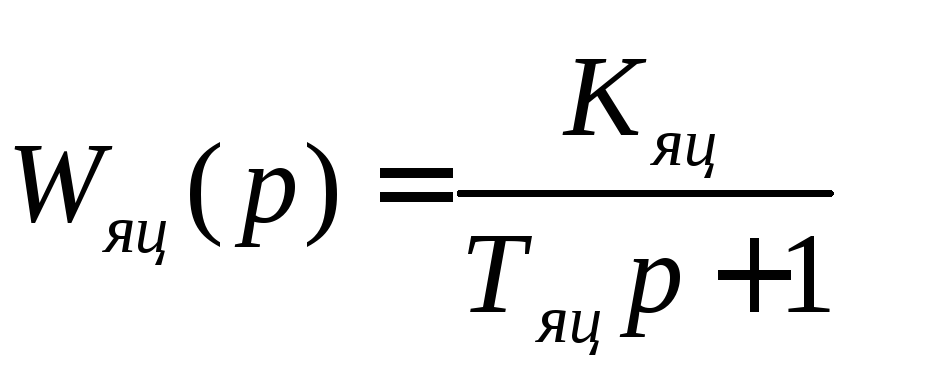
6.1.2Расчет параметров передаточной функции якорной цепи.
Передаточная функция якорной цепи двигателя
 (58)
(58)
 (59)
(59)
 где
Rяц
и Тяц
– сопротивление и постоянная времени
якорной цепи
где
Rяц
и Тяц
– сопротивление и постоянная времени
якорной цепи
Из таблицы 1 берем данные: Rяц = 299 мОм Lяц = 7.2 мГн.
![]()
![]() (60)
(60)
![]() (61)
(61)
6.1.3Расчет параметров передаточной функции регулятора контура тока.
Внутренний токовый контур, как правило, настраивается на оптимум по модулю. Из проведенных расчетов видно, что в контуре тока имеется звено с большой постоянной времени (Тяц) и звенья с малыми постоянными времени (Тдт и Ттп), сумма которых на много меньше большой постоянной времени. Необходимо при синтезировании регулятора токового контура компенсировать данную большую постоянную времени.
Используем пропорционально-интегральный регулятор (ПИ), передаточная функция которого
 ,
,
где βрт и τрт – динамический коэффициент усиления и постоянная времени регулятора тока
Значение τрт при настройке на оптимум по модулю принимается равным большой постоянной времени контура τрт = Тяц = 0.024 с.
Значение коэффициента усиления регулятора определяется по формуле
 ,
(62)
,
(62)
где Kктр – коэффициент усиления разомкнутого контура тока
Тμ – сумма малых постоянных времени контура тока
![]()
![]()
Передаточная функция регулятора тока примет вид
![]()
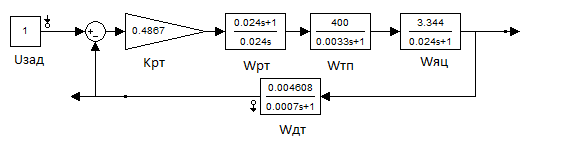
Рис.13 Структурная схема контура тока.
 При
подаче единичного задающего импульса
получаем переходной процесс, соответствующий
настройке на модульный оптимум (4.3 %
перерегулирования).
При
подаче единичного задающего импульса
получаем переходной процесс, соответствующий
настройке на модульный оптимум (4.3 %
перерегулирования).
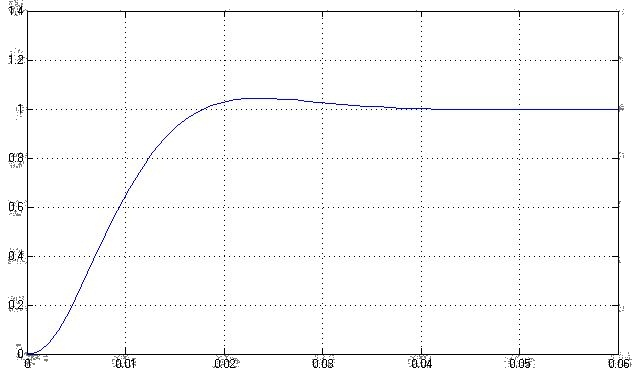
Рис.14 Переходная характеристика контура тока якоря.
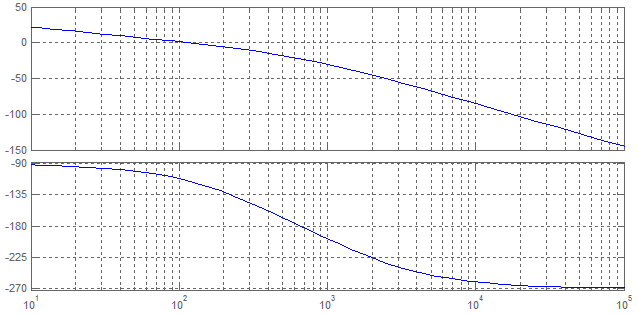
Рис.15-ЛАФЧХ контура тока
а) Амплитудно-частотная характеристика.
б) Фазо-частотная характеристика.
Из рисунков видно, что перерегулирование переходного процесса контура тока составляет 4.3%, запас устойчивости контура тока составляет 64 градусов. Следовательно, контур тока настроен на оптимум по модулю.