

tmm-lab
.pdf- 63 -
ТММ. Методичні вказівки до лабораторних занять
ЛАБОРАТОРНА РОБОТА №9
ВИЗНАЧЕННЯ ПЕРЕДАТОЧНИХ ВІДНОШЕНЬ БАГА-
ТОЛАНКОВИХ ЗУБЧАСТИХ МЕХАНІЗМІВ
Кафедра теоретичної і прикладної механіки
- 64 -
ТММ. Методичні вказівки до лабораторних занять
Мета роботи: складання кінематичних схем та визначення передаточних відношень зубчастих механізмів.
Обладнання та інструмент: набір моделей зубчастих механізмів, мікрокалькулятор.
За допомогою простої зубчастої передачі, що складається з двох зубчастих коліс, можна одержати передаточне відношення 1...6. Практика вимагає значно більшої величини передаточних відношень. Існує два типи багатоланкових зубчатих механізмів:
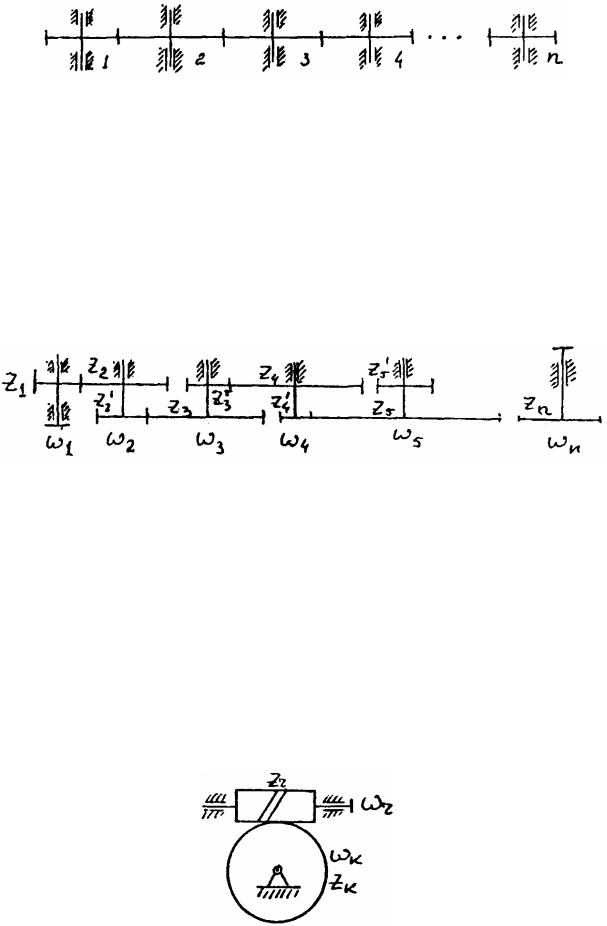
1)механізми, у яких осі обертання нерухомі – ряд з нерухомими осями. Вони поділяються на два види: ряд, у якого навколо кожної нерухомої осі обертається тільки одне колесо (рисунок 2), ряд, у якого навколо кожної нерухомої осі (крім першої та останньої) обертається два жорстко з’єднані колеса (рисунок 3).
2)Механізми, у яких осі деяких коліс рухомі – епіциклічні передачі.
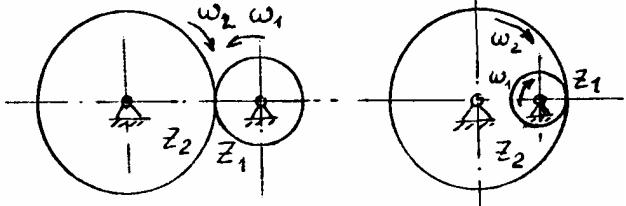
Рисунок 1. Прості зубчасті передачі
Для передачі, яка складається з двох циліндричних зубчастих коліс (рисунок 1), передаточне відношення визначається за формулою
i = |
ω1 |
= ± |
z2 |
. |
(1) |
|
|
|
|||||
12 |
ω2 |
|
z1 |
|
||
|
|
|
||||
Послідовний ряд з нерухомими осями першого виду (рисунок 2) використовується у випадку, коли осі обертання першого і останнього коліс розміщені далеко одна від одної, або коли бажано змінити напрям обертання веденого колеса.
Чернігівський державний технологічний університет
- 65 -
ТММ. Методичні вказівки до лабораторних занять
Рисунок 2. Ряд з паразитними колесами
Передаточне відношення, такого ряду
i |
= (−1)m |
ω1 |
= (−1)m |
z2 |
, |
(2) |
|
|
|||||
1n |
ω2 |
|
z1 |
|
|
|
|
|
|
|
|||
де m – число зовнішніх зачеплень. |
|
|||||
Послідовний ряд другого виду (рисунок 3) використовується у випадку, коли бажане передаточне відношення не можна виразити як відношення двох простих цілих чисел.
Рисунок 3. Ряд з парним зчепленням
Передаточне відношення такого ряду
i |
= i |
|
i |
|
|
i i |
|
= (−1)m |
|
ω1 |
= (− 1)m |
z2 z3 zn |
, |
(3) |
||
|
23 |
(n −1)n |
|
|
||||||||||||
1n |
12 |
|
|
34 |
|
ωn |
|
z1 z2 zn −1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
де m – число зовнішніх зачеплень. |
|
|
|
|
||||||||||||
Передаточне відношення черв’ячної передачі (рисунок 4) |
|
|||||||||||||||
i |
= |
ir |
|
= |
zk |
, |
|
|
|
|
|
|
|
(4) |
||
|
|
|
|
|
|
|
|
|
|
|||||||
rk |
|
ik |
|
|
|
zr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
де zk |
– число зубців колеса, zr |
– число зубців черв’яка. |
|
|||||||||||||
Рисунок 4. Черв’ячна передача
Кафедра теоретичної і прикладної механіки
- 66 -
ТММ. Методичні вказівки до лабораторних занять
Епіциклічні передачі можуть мати одну вхідну ланку (W = 1) – планетарні та більш ніж одну вхідну ланку (W > 1) – диференціальні. Такі передачі застосовуються завжди тому, що вони дають змогу одержати значні передаточні відношення при невеликій кількості коліс.
Передаточне відношення i1H простої планетарної передачі (рисунок 5) від ведучого колеса І (вхідна ланка) до водила 4 обчислюється за формулою
|
i |
= 1 − i H . |
(5) |
|
|
1H |
|
13 |
|
|
Символ |
i H |
означає передаточне відношення від першого колеса до |
|
|
|
|
13 |
|
останнього (третього) у їх русі по відношенню до водила H . Для розрахунку |
||||
i H |
треба припустити, що водило нерухоме, а колесо 3 дістало можливість обер- |
|||
13 |
|
|
|
|
татися навколо своєї осі. Тоді колеса утворять звичайний зворотній послідовний ряд.
Для цього ряду: i H |
= |
z2 |
z3 |
. |
(6) |
|
|
||||
13 |
|
z1 |
z2 |
|
|
|
|
|
|||
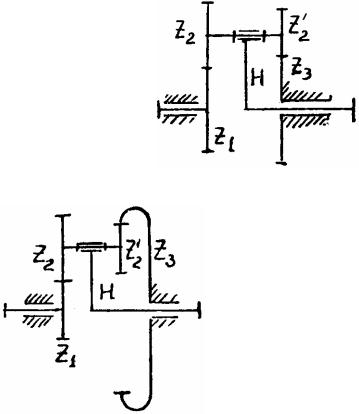
Рисунок 5. Планетарна передача 1
Для планетарної передачі (рисунок 6)
i H |
= − |
z2 |
z3 |
. |
(7) |
|
|
||||
13 |
|
z1 |
z2 |
|
|
|
|
|
|||
Рисунок 6. Планетарна передача 2
у цьому випадку від’ємне,
оскільки колеса послідовного ряду утворюють одне зовнішнє і одне внутрішнє зачеплення.
Чернігівський державний технологічний університет

- 67 -
ТММ. Методичні вказівки до лабораторних занять
Для планетарної передачі (рисунок 7) маємо
i H |
= − |
z3 |
. |
(8) |
|
||||
13 |
|
z1 |
|
|
|
|
|
||
Рисунок 7. Планетарна передача 3
Ведучою ланкою у планетарній передачі може бути також і водило. У цьому випадку
iH 1 |
= |
1 |
. |
(9) |
|
||||
|
|
i1H |
|
|
Передаточне відношення зовнішньої конічної передачі (рисунок 8) знаходиться
i = |
ω1 |
= |
z2 |
. |
(10) |
|
|
|
|||||
12 |
ω2 |
|
z1 |
|
||
|
|
|
||||
Рисунок 8. Конічна передача
Якщо багатоланкова зубчаста передача складається з кількох послідовно з'єднаних зубчастих передач, то загальне передаточне відношення її дістають шляхом перемноження передаточних відношень передач, що входять до її складу.
Послідовність виконання
1.Накреслити кінематичну схему механізму з нерухомими осями.
2.Підрахувати число зубців коліс.
3.Підрахувати число рухомих ланок та число кінематичних пар. По формулі Чебишева підрахувати ступінь рухомості.
4.Розділити (у разі необхідності) складний механізм на прості та для кожного з них підрахувати передаточне відношення. Підрахувати загальне передаточне відношення всього механізму.
5.Пункти 1-4 виконати для планетарного механізму.
6.Передаточні відношення, одержані за допомогою формул, перевірити на механізмі. Співставити результати.
Кафедра теоретичної і прикладної механіки
- 68 -
ТММ. Методичні вказівки до лабораторних занять
ЛАБОРАТОРНА РОБОТА №9
ВИЗНАЧЕННЯ ПЕРЕДАТОЧНИХ ВІДНОШЕНЬ БАГАТОЛАНКОВИХ ЗУБЧАСТИХ МЕХАНІЗМІВ
1.Мета роботи.
2.Теоретичне обґрунтування.
3.Характеристика експериментальної установки. а) Схема механізму з нерухомими осями
б) Схема планетарного механізму
4.Методика проведення. Передаточні відношення.
5.Експериментальні дані Результати перевірки.
6.Обробка і аналіз одержаних результатів.
7.Підсумки.
Чернігівський державний технологічний університет
- 69 -
ТММ. Методичні вказівки до лабораторних занять
ЗМІСТ
1.ЛАБ. РОБОТА №1. СКЛАДАННЯ КІНЕМАТИЧНИХ СХЕМ І СТРУ-
КТУРНИЙ АНАЛІЗ МЕХАНІЗМІВ………………………………............ 3
2.ЛАБ. РОБОТА №2. ВИМІРЮВАННЯ ЛІНІЙНИХ ПЕРЕМІЩЕНЬ, ШВИДКОСТЕЙ ТА ПРИСКОРЕНЬ КУЛІСИ СИНУСНОГО МЕХА-
НІЗМУ……………………………………………………………………….. 11
3.ЛАБ. РОБОТА №3. ЕКСПЕРИМЕНТАЛЬНЕ ВИЗНАЧЕННЯ ЗВЕДЕНОЇ МАСИ ПЛОСКИХ МЕХАНІЗМІВ…………………………………... 18
4.ЛАБ. РОБОТА №4. ЗНІМАННЯ СТАТИЧНИХ ХАРАКТЕРИСТИК ПРИВОДУ З ПРУЖНОЮ ТА ДИНАМІЧНОЮ В’ЯЗЗЮ……………….. 23
5.ЛАБ. РОБОТА №5. ЗРІВНОВАЖУВАННЯ ОБЕРТОВИХ ЛАНОК З ВІДОМИМ РОЗТАШУВАННЯМ НЕЗРІВНОВАЖЕНИХ МАС……….. 35
6. |
ЛАБ. РОБОТА №6. |
ДИНАМІЧНЕ БАЛАНСУВАННЯ РОТОРІВ……… 44 |
7. |
ЛАБ. РОБОТА №7. |
УТВОРЕННЯ ПРОФІЛЮ ЗУБЦЯ КОЛЕСА МЕ- |
|
ТОДОМ ОБКАТКИ |
........................................................................................ 51 |
8.ЛАБ. РОБОТА №8. ВИЗНАЧЕННЯ ГЕОМЕТРИЧНИХ ПАРАМЕТРІВ ЦИЛІНДРИЧНИХ ПРЯМОЗУБИХ ЕВОЛЬВЕНТНИХ ЗУБЧАСТИХ КОЛІС……………………………………………………………………….. 56
9ЛАБ. РОБОТА №9. ВИЗНАЧЕННЯ ПЕРЕДАТОЧНИХ ВІДНОШЕНЬ БАГАТОЛАНКОВИХ ЗУБЧАСТИХ МЕХАНІЗМІВ……………………. 63
Кафедра теоретичної і прикладної механіки