

Лекция 15
.docВ практике известны и другие методы непрерывного контроля дорожно-строительных материалов при послойном их уплотнении машинами динамического воздействия. Одним из устройств, устанавливаемых на катках, является динамический индикатор для автоматического контроля качества уплотнения в процессе трамбования или вибрирования.
В катках 1 (рис.216,а) с вибровозбудителем на вибровальце 5 устанавливается вибродатчик 4, сигналы от которого поступают по кабелю 3 в преобразователь и орган сравнения 2, усиливаются и подаются в исполнительные органы. Одновременно данные измерений поступают в постоянное запоминающее устройство и на панель индикации в кабине машиниста. В процессе работы катка на уплотняемой площадке приборы по показаниям вибродатчиков регистрируют измеряемые характеристики материала.
|
Рис.216. Автоматизация контроля качества уплотняемых дорожно-строительных материалов |
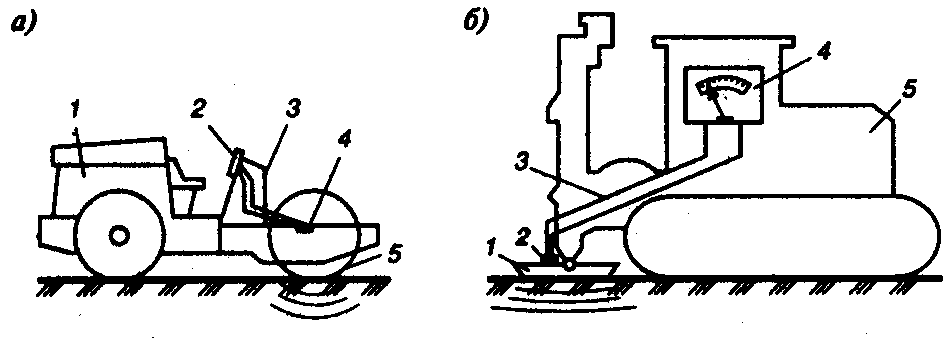
На экране дисплея или индикаторе счетчика высвечиваются цифры средних значений за период измерения от 5 до 30 с. Прибор настраивается на показания, соответствующие требуемой степени плотности, которые устанавливаются после стандартных испытаний. Превышение заданной плотности регистрируется световым или звуковым сигналами, которые оповещают о достижении нормативного уровня укатываемой поверхности.
Каток может комплектоваться дополнительным печатающим устройством для выдачи на бумажную ленту данных за время работы машины.
В трамбующих машинах 5 (рис.216,б) автоматическое устройство включает в себя подобные элементы и состоит из индукционного вибродатчика 2, установленного на трамбующей плите 1, и прибора 4, размещенного в кабине машиниста, регистрирующего сигнал датчика и соединенного с ним кабелем 3. Перед началом работ определяют показания индикатора (тарировку), соответствующие требуемой плотности грунта при заданной толщине слоя. Степень уплотнения при работе машин динамического действия обратно пропорциональна скорости их движения. Поэтому следует стремиться к поддержанию той скорости, которая получена при тарировке.
Использование динамических индикаторов плотности повышает производительность грунтоуплотняющих машин и качество уплотнения грунта.
В связи с тем, что не все указанные методы способны обеспечить контроль всех видов качества уплотненных дорожно-строительных материалов, возникла необходимость в разработке нетрадиционных методов измерений;
Для оперативного неразрушающего контроля грунтовых оснований, бетонных и асфальтобетонных покрытий используют контрольно-измерительные радиометрические приборы. Их работа основана на применении источников γ-излучения, быстрых нейтронов или на их совместном действии. В приборах используются свойства высокой проникающей способности γ-лучей и снижения интенсивности их излучения при прохождении через исследуемый материал. Поэтому, зная интенсивность излучения, исследуемый материал и заданную толщину уплотняемого слоя, можно, протарировав приборы, определять степень плотности укладываемого материала. Содержание влаги в контролируемом материале определяется по замедлению нейтронного излучения атомами водорода, а содержание связующего в асфальтобетонной смеси— по количеству углеводородных соединений в битуме.
Эти приборы используют как для поверхностного (метод вторичного рассеивания), так и для глубинного (метод просвечивания) измерения параметров уплотняемых материалов.
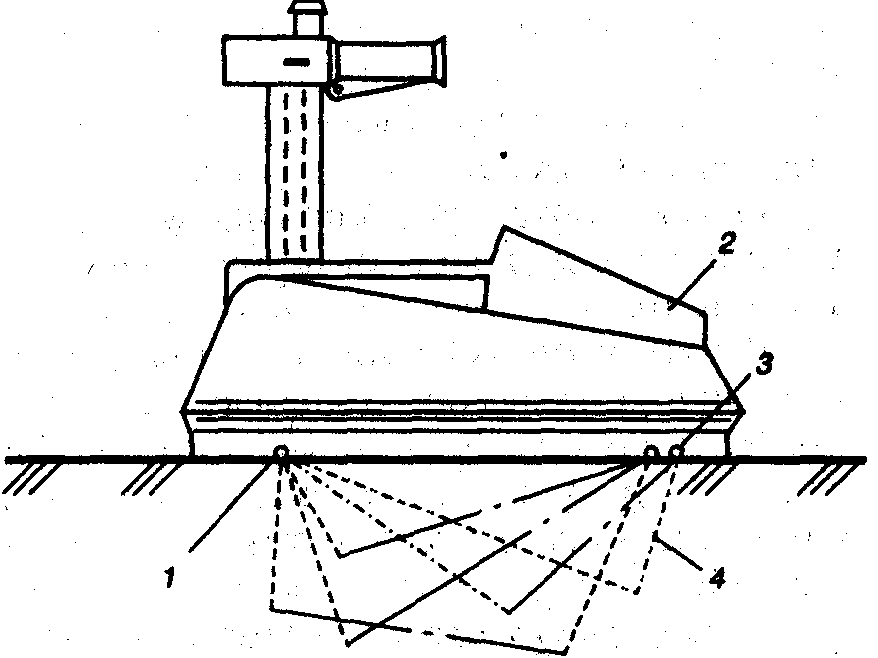
В настоящее время на строительстве дорог применяют переносные приборы для поверхностного измерения плотности асфальтобетонных покрытий толщиной 2,5...6 см, для поверхностного толщиной 10 см и глубинного толщиной 25 см измерения плотности и влажности грунтов и материалов покрытий (рис.217), а также для определения содержания связующего в асфальтобетонных смесях. Эти автономные приборы состоят из встроенного микропроцессора, цифрового дисплея на жидких кристаллах,
|
Рис.217. Схема работы прибора оперативного неразрушающего контроля уплотняемых и укладываемых дорожно-строительных материалов: 1— источник; 2 — дисплей; 3 ‑ приемник;: 4 — траектории фотонов |
Навесные приборы подобного типа устанавливаются на дорожных катках и предназначены для непрерывного контроля плотности укладываемого и укатываемого асфальтобетона в процессе работы уплотняющей машины. Такой прибор состоит из корпуса, закрепленного на нижней стороне рамы катка между вальцами. Внутри корпуса в двойных герметизированных капсулах из нержавеющей стали помещен источник излучения, отвечающий требованиям температурного класса и хранения радиоактивных материалов. Дополнительную термическую и механическую изоляцию обеспечивают конструкция и материал корпуса.
Источник излучения и приемное устройство расположены в корпусе прибора таким образом, что γ‑лучи проникают в исследуемый материал, рассеиваются в нем, преломляются и возвращаются к детектору. Отсюда данные непрерывных измерений передаются с помощью соединительного кабеля на бортовой микрокомпьютер, где происходит обработка и сравнение результатов измерений с заданным значением параметров. Индикаторно - регулирующий блок, соединенный с компьютером и установленный на приборной панели кабины перед машинистом, подает информацию на устройство визуального отображения информации — дисплей. На блоке управления катка устанавливаются также цветные сигнальные лампы, а при необходимости может подключаться и звуковая сигнализация.
Степень уплотнения асфальтобетона определяется в течение нескольких секунд в процессе работы катка. Перевод катка на смежную полосу укатки производится только после получения требуемой плотности материала, фиксируемой на дисплее с одновременным включением сигнальной лампы. После перемещения катка на новый участок работы определяется и степень предварительного уплотнения, достигнутая асфальтоукладчиком. Полученные значения плотности асфальта можно ввести в запоминающее устройство и получить результаты измерений в распечатанном виде за любой промежуток времени с указанием участков измерений.
Все приборы надежно защищены от воздействия вибрации, перепада температур и пылевлагонепроницаемы. Изоляция изотопов обеспечивает практически естественный уровень радиации. Доза излучения при работе с приборами не превышают 4% от предельно допустимого значения. Для полной безопасности с помощью быстроразъемных соединений прибор по окончании работы снимается с катка и автоматически переводится в положение транспортировки или хранения, а перед началом смены вновь устанавливается.
К достоинствам радиометрического метода контроля уплотнения дорожно-строительных материалов следует отнести возможность проводить замеры на горячем асфальте и в непосредственной близости от рабочих органов катков, асфальто-, бетоно- и бордюроукладчиков контролировать возрастание степени уплотнения при каждом проходе катка и определять оптимальное число проходов, а также быстро, надежно и с высокой степенью точности производить измерения состояния материалов. Все сказанное необходимо для достижения требуемых параметров дорожных покрытий и оптимального использования катков.
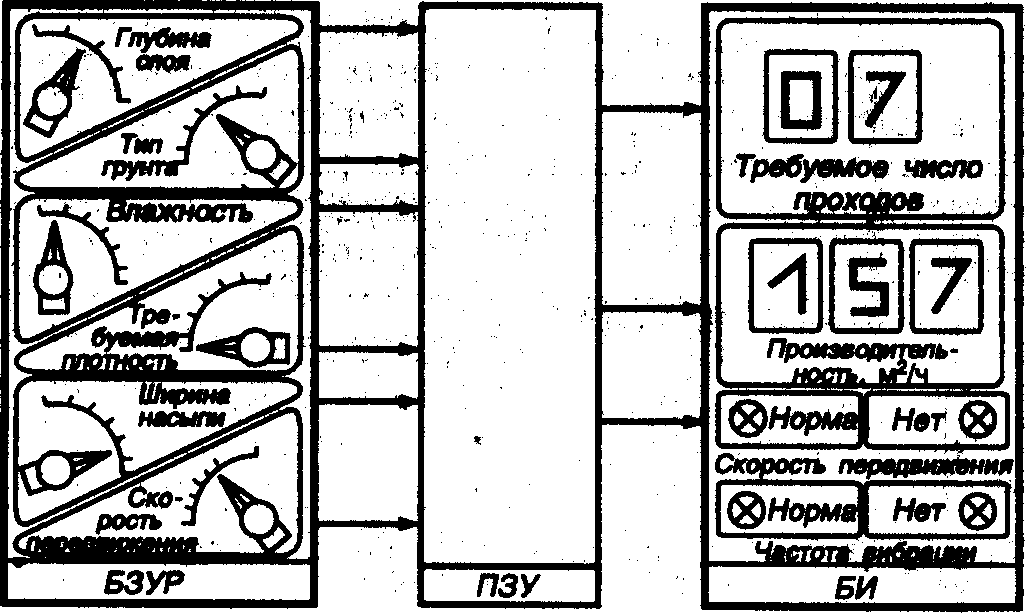
Современное устройство (рис.218), устанавливаемое на катках и обеспечивающее его автоматический режим работы, состоит из трех основных блоков. К ним относятся блок задания условий работы (БЗУР), постоянное запоминающее устройство (ПЗУ) и блок индикации (БИ). БЗУР состоит из набора переключателей, с помощью которых задаются условия работы катка. ПЗУ содержит информацию по специально разработанным программам, устанавливающим взаимосвязь между условиями и режимами работы катка. На блок индикации в цифровой (на дисплее), световой, а при необходимости и звуковой форме поступают данные о работе катка.
Большое внимание в последние годы уделяется автоматизации грузоподъемных машин, таких, как погрузчики, самоходные стреловые и башенные краны. Основным направлением автоматизации этих машин также является управление, безопасность, контроль и диагностика. Однако в связи со спецификой использования главную роль в работе грузоподъемных машин играет их безопасность.
В настоящее время имеется большое количество конструктивных решений ограничителей нагрузки
|
Рис.218. Автоматическое устройство установки режима работы катков |
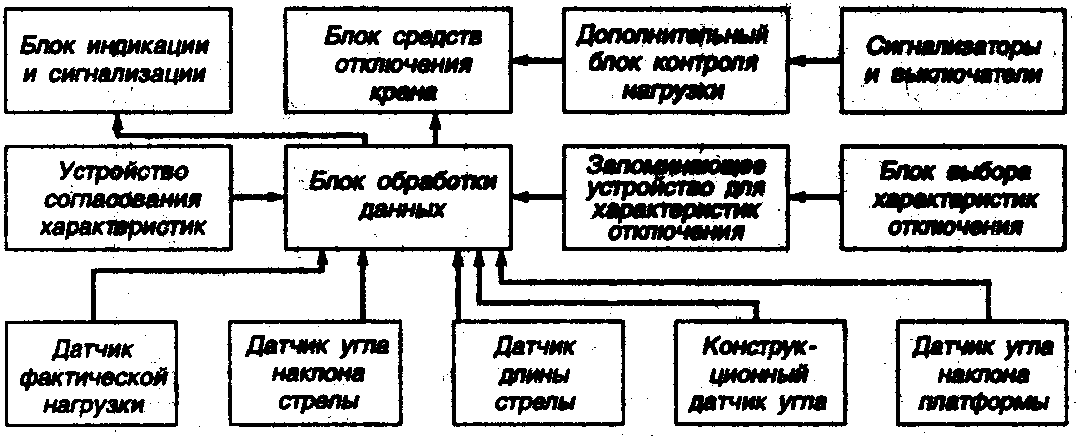
Основной характеристикой кранов является грузовая, представляемая зависимостью между вылетом и нагрузкой. Ограничитель включает в себя датчик фактической нагрузки и датчик (или датчики) изменения вылета, по сигналу которых определяется допустимая нагрузка. Это датчики угла наклона стрелы и длины стрелы (при телескопической стреле с изменяемой длиной). Для повышенной точности контроля нагрузки и вылета в некоторых типах ограничителей используются конструкционные датчики угла (между осями стрелы и гидроцилиндрами подъема), а также датчик угла наклона платформы. Сигналы указанных датчиков поступают в блок обработки данных, где сравниваются с данными о характеристиках отключения, выдаваемыми из запоминающего устройства. Результаты обработки выводятся на блок индикации, а при превышении фактической нагрузки относительно допустимой — на блок средств отключения. Все универсальные ограничители имеют блок выбора характеристик отключения (в зависимости от вида установленного оборудования и режима работы крана) и устройство согласования характеристик отключения. В некоторых ограничителях содержатся дополнительные средства контроля, создающие второй уровень защиты кранов от опрокидывания путем контроля давления в гидроопорах, а также сигнализаторы и выключатели, блокирующие предельные перемещения механизмов и нагрузку на них. Эта схема ясно показывает, как важно широкое внедрение, особенно в гидравлических самоходных стреловых кранах, современных средств автоматизации.
|
|
|
Рис.219. Структурная схема ограничителей нагрузки крана |
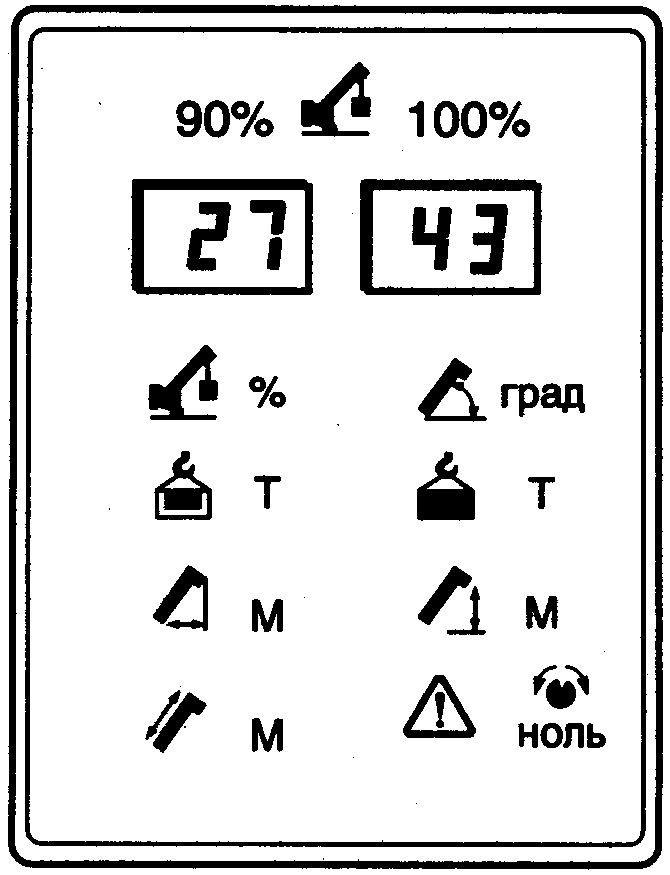
Стреловые самоходные краны последних моделей имеют бортовые электронные системы, состоящие из микропроцессора, пульта управления и датчиков, установленных на базовой машине и на крановой установка. Системы контроля и диагностики базовой машины: и управляющих систем крана подобны рассмотренным на экскаваторах и обеспечивают машиниста всеми необходимыми данными для правильной эксплуатации машины и проведения технического обслуживания и ремонта, а также предупреждают о возможных неисправностях и способах их устранения. Крановые установки имеют свои особенности. Безопасное ведение работ кранами обеспечивается автоматически работающими средствами защиты. К ним относятся: конечные выключатели и различные ограничители; креномеры и анемометры; устройства, сигнализирующие о приближении к ЛЭП и предотвращающие столкновение стрел работающих рядом кранов между собой или с окружающими кран конструкциями; устройства, предотвращающие падение груза и обеспечивающие его опускание в аварийных ситуациях. К последним внедренным на кранах разработкам относятся различные конструкции автоматических ограничителей с информационной панелью в кабине машиниста. В такой панели (рис.220) на экранах двух дисплеев в цифровой форме, обычно постоянно, выводятся получаемые от датчиков ограничителей значения грузового момента и угла наклона стрелы. Нажатием соответствующих кнопок на панели на дисплей можно вызвать значения фактической и допускаемой грузоподъемности, фактического вылета и допускаемой высоты подъема крюка, фактической длины и угла наклона стрелы. При случайной ошибке машиниста, ведущей к перегрузкам и выходу из штатных режимов, включаются световая и звуковая сигнализации и одновременно отключаются все рабочие механизмы. В этом случае, так же, как и при возникновении неисправностей в машине, на дисплей выводится цифровой код с указанием ошибки или неисправности.
|
Рис.220. Информационная панель в кабине управления стрелового крана |
Благодаря используемой в кранах гидравлической системе управления производятся автоматическая установка и регулировка выносных опор и синхронное выдвижение двух-трех телескопических секций стрелы одновременно с автоматической фиксацией их в рабочих положениях.
В зависимости от требуемой грузоподъемности, высоты подъема и вылета крюка на ряде кранов применяются автоматически перемещаемые противовесы.
При передвижении кранов по бездорожью или по тяжелым грунтам строительной площадки в работу могут автоматически включаться дополнительные ведущие мосты шасси. При этом во многих кранах все ходовые мосты машины оборудованы независимыми пневмогидравлическими подвесками с автоматическим выравниванием дорожного просвета при проходе по неровным поверхностям.
Торможение большинства многомостовых кранов при их передвижении по дорогам производится сервопневматическим тормозом, автоматически действующим на все колеса.
в основном оборудованы электромеханическими устройствами безопасности. К автоматически срабатывающим устройствам кранов относятся постоянно действующие управляемые рельсовые захваты, указатели вылета, частоты вращения грузовой лебедки (у кранов с двумя автономно управляемыми лебедками) и силы ветра, ограничители конечных положений рабочих органов (передвижения крана и грузовой тележки, высоты подъема и опускания крюка, поворота крана и угла наклона стрелы) и грузоподъемности. В последнее время, наряду с механическими передачами, для включения основных узлов в работу краны оснащаются и гидравлическими устройствами, используемыми в механизме выдвижения башни и выносных опорах (гидроцилиндры), в механизмах поворота и передвижения (гидромуфты) и для автоматической подачи смазывающего материала к труднодоступным местам редукторов, особенно планетарных (гидронасосы). Появление гидравлических систем в башенных кранах позволяет автоматизировать работу этих механизмов.
Значительное увеличение высоты подъема, вылета и грузоподъемности в башенных кранах (особенно зарубежных) ведут к дальнейшему усилению и совершенствованию систем защиты. Для предотвращения столкновения стрел при работе нескольких кранов на одной строительной площадке разработаны и применяются две системы защиты: электромеханическая с контролем двух зон и модульная с контролем пяти зон. Принцип работы этих систем заключается в том, что сигналы положения поворотной части крана и грузовой тележки поступают в электронные модули с регулируемым порогом чувствительности в зависимости от углового положения стрелы и вылета. Если сигналы превысят пороги, соответствующие границам контролируемой зоны, информация поступает на реле в пульт машиниста, и происходит непосредственное воздействие на механизмы крана, т. е. замедление движения или остановка одного или всех узлов крана. Одновременно через систему световой и звуковой сигнализации идет оповещение машиниста о возникновении аварийной ситуации.
В последние годы в мировой практике появились различные многопараметрические системы защиты и диагностики, в том числе основанные на использовании микропроцессоров. В последнем случае краны оснащаются датчиками, установленными в механизмах и в ответственных узлах металлоконструкций кранов. Появление любых неполадок в работе крана высвечивается на экране дисплея и позволяет своевременно устранять все появившиеся неисправности.
Большое значение для безопасной работы кранов имеет и точный контроль скорости всех движений, осуществляемый регуляторами бесступенчатого контроля. При этом система оптимальной надежности в работе и защите крана от предельных отклонений основана на программируемом логическом контроллере. Одновременно ведется бесступенчатый контроль максимальных значений нагрузки и скорости при соответствующих вылетах. Возникающие отклонения от нормальной работы «мгновенно» появляются на дисплее и одновременно в световом и звуковом исполнении в кабине машиниста, а механизмы крана отключаются от электропитания.
На мощных кранах используется автоматическая укладка каната на барабан грузовой лебедки и автоматическое натяжение каната передвижения грузовой тележки.
В кранах применяют системы автоматического уравновешивания массы стрелы с грузом на крюке за счет изменения положения противовеса с рычажно-шарнирной рамой (в кранах с подъемной стрелой) и с кареткой на противовесной консоли (в кранах с горизонтальной стрехой и грузовой тележкой).
Кровельные работы и устройство полов с использованием рулонных материалов (рубероида, линолеума и т.п.) находят широкое применение в гражданском и промышленном строительстве и относятся к наиболее трудоемким работам. Поэтому внедрение механизации и автоматизации основных производственных процессов при устройстве кровли значительно снижает трудоемкость и повышает производительность с одновременным улучшением качества выполняемых работ.
Для автоматического контроля и управления процессом разогрева рулонных материалов разработано электронное устройство к существующим машинам, предназначенным для приклейки наплавляемого рубероида и сварки линолеума. Поддержание заданной температуры разогрева укладываемого отделочного материала в соответствии с технологическим процессом осуществляется с помощью автоматизированного электропривода. Принцип его работы состоит в автоматическом изменении частоты вращения приводного электродвигателя машины, а следовательно, и скорости ее движения, в зависимости от изменения температуры поверхностного слоя материала. В представленной на рис.221,а, б
|
Рис.221. Автоматизация работы машины для приклейки наплавляемого рубероида |
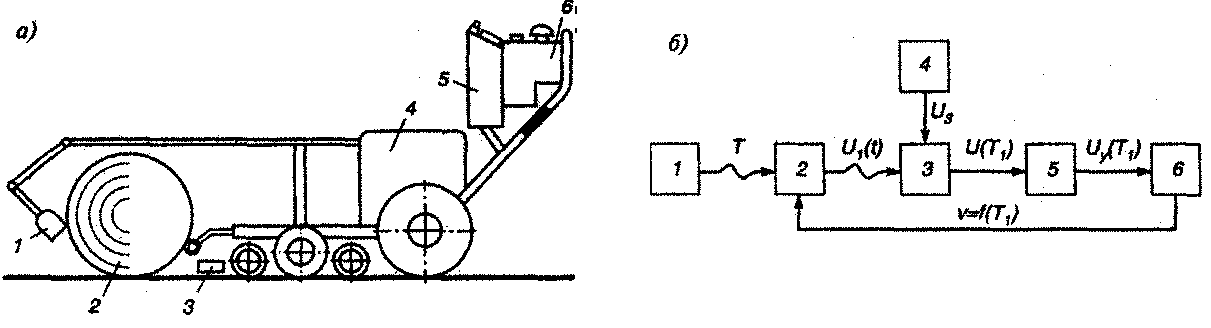
функциональной схеме нагреватель 1 с температурой Т воздействует на рулонный материал 2, нагревая его за время t до температуры Т1. Под действием этой температуры датчики 3 вырабатывают электрический сигнал U(T1), поступающий в блок управления 5. Здесь сигнал преобразуется в управляющее напряжение Uу(T1) для питания электропривода 6, который приводит в движение со скоростью v = f(T1) приклеивающую или сварочную машины. В зависимости от используемого материала и условий работы начальная установка скорости осуществляется задающим напряжением U3 от задатчика 4.
Датчик 3 выполнен по схеме равновесного моста постоянного тока. Чувствительный элемент (терморезистор), изменяющий свое сопротивление в зависимости от изменения температуры, подключен к одному плечу этого моста и располагается в процессе работы на расстоянии 4...6 мм над поверхностью разогреваемого материала. Датчиком 3 определяется температура нагрева поверхностного слоя рубероида и выдается электрический сигнал соответствующего уровня в блок управления 5. Этот блок устанавливает такую частоту вращения вала электродвигателя привода 4 машины, при которой за счет изменения времени пребывания материала в зоне нагрева обеспечивается необходимая температура его разогрева в диапазоне, заданном блоком регулирования 6.
![]()