

Лекции Word Часть1
.pdf
|
|
|
41 |
|
|
|
|
|
|
|
|
Определить натуральную величину треугольника АВС способом вращения |
|
||||||||||
вокруг проецирующих прямых можно выполнив последовательно два |
|
||||||||||
преобразования. |
|
|
|
|
|
|
|
|
|
|
|
C211 |
q2Ξ В12 |
|
1. |
Первое |
|
преобразование: |
|||||
|
плоскость общего положения |
||||||||||
|
|
j2 |
B2 |
преобразуем |
во |
фронтально |
|||||
A21 |
|
проецирующую |
|
плоскость |
|||||||
f |
|
H2 |
(В21А2С21). |
|
Для этого линию |
||||||
|
|
A2 |
|
уровня (горизонталь АН) |
|||||||
|
|
|
преобразуем |
во фронтально |
|||||||
|
|
|
1 |
проецирующую |
|
прямую |
|||||
A11 |
|
|
C2 |
(А1Н11) используя вращение |
|||||||
J1 Ξ A1 |
|
вокруг |
оси |
|
J┴П1. Все |
||||||
|
|
вершины |
|
по |
треугольника |
||||||
|
|
|
|
движутся |
окружностям |
||||||
|
|
|
H1 |
расположенным |
в |
горизон- |
|||||
|
|
|
тальных |
плоскостях уровня. |
|||||||
|
B11 |
|
B1 |
Данное |
|
|
преобразование |
||||
|
|
|
позволяет |
определить |
угол |
||||||
|
|
|
|
наклона |
плоскости |
треуголь- |
|||||
C111 |
|
|
1 |
ника |
к |
|
горизонтальной |
||||
q1 |
H1 |
плоскости проекций w. |
|
||||||||
|
C11 |
|
|
|
|
|
|
|
|
||
Рис. 65. Определение натуральной величины треугольника способом вращения вокруг |
|
||||||||||
|
прямых перпендикулярных плоскостям проекций |
|
|
|
|
|
|
||||
2. Второе преобразование – плоскость проецирующую преобразуем в плоскость уровня используя вращение вокруг оси q ┴ П2. Все вершины треугольника движутся по окружностям, расположенным во фронтальных плоскостях уровня. Проекция треугольника DА11В11С111 равна натуральной величине треугольника.
ВРАЩЕНИЕ ВОКРУГ ЛИНИИ УРОВНЯ
В названном способе преобразования объект вращается вокруг линии уровня до положения параллельного плоскости проекций. Все точки заданного объекта движутся по окружностям, плоскости которых перпендикулярны оси вращения – выбранной линии уровня. В положении параллельном плоскости проекций, все расстояния от оси вращения до вращающихся точек проецируются в натуральную величину. В приведенном на рис. 66 примере
способом вращения вокруг горизонтали НС определяется натуральная величина
PDF created with pdfFactory Pro trial version www.pdffactory.com

|
42 |
|
треугольника АВС. Натуральная величина радиуса вращения точки В (отрезок |
||
?ОВ? ) определяется способом прямоугольного треугольник. |
||
|
В2 |
|
А2 |
|
DZ |
H2 |
|
С2 |
O2 |
|
|
|
DZ |
|
|
В1 |
|
X |
|
|
|
|
|
А1 |
|
IOBI |
H1 |
O1 |
С1 |
|
||
А |
|
|
|
B |
|
Рис. 66. Определение натуральной величины треугольника способом вращения вокруг |
||
|
горизонтали |
|
PDF created with pdfFactory Pro trial version www.pdffactory.com

43
ПОВЕРХНОСТИ
ПОВЕРХНОСТЬ – это множество положений линии перемещающейся по определенному закону.
Линия перемещающаяся в пространстве называется ОБРАЗУЮЩАЯ. Линия по которой происходит перемещение называется НАПРАВЛЯЮЩАЯ.
Образующая
Направляющая
Рис. 67. Образование поверхности
Способы задания поверхностей
Поверхность может быть задана аналитически, графически. Графических способов задания поверхности три: очерк, каркас, определитель
Познакомимся с графическими способами задания поверхности.
Очерк поверхности при ортогональном проецировании – это границы проекций поверхности или следы проецирующей поверхности, огибающей заданную поверхность, на плоскостях проекций.
PDF created with pdfFactory Pro trial version www.pdffactory.com
44
Поверхность
Огибающая
цилиндрическая поверхность
 Очерк поверхности
Очерк поверхности
Рис. 68. Очерк поверхности
Каркас поверхности – это множество точек или линий формирующих поверхность.
Точечный каркас поверхности – множество точек принадлежащих поверхности.
Линейчатый каркас поверхности – множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит одна линия каркаса.
Определитель поверхности – это совокупность геометрических
элементов определяющих поверхность и закономерность описывающая их движение в пространстве.
Ф(L,k)(A)
Ф –поверхность; L – образующая
прямолинейная; K – направляющая
криволинейная; A – алгоритм движения
образующей
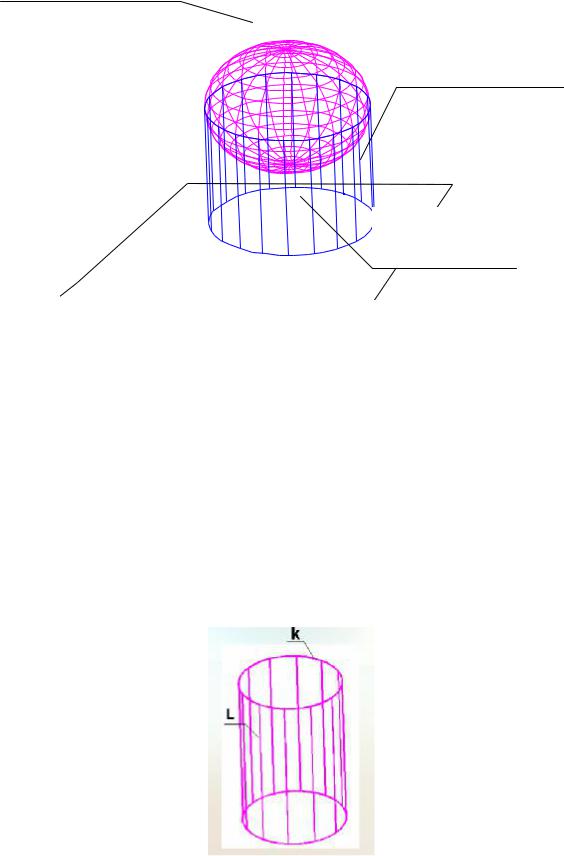
Рис. 69. Линейчатый каркас поверхности цилиндра
PDF created with pdfFactory Pro trial version www.pdffactory.com

45
КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ
По виду образующей поверхности разделяют на линейчатые и нелинейчатые (рис. 70).
Клинейчатым развертываемым поверхностям относятся гранные поверхности (призмы, пирамиды и т.д.) и торсовые поверхности (цилиндрические, конические, торсы).
Клинейчатым неразвертываемым поверхностям относятся поверхности с плоскостью параллелизма (цилиндроид, коноид, гиперболический параболоид)
ивинтовые поверхности (прямой и наклонный геликоиды).
Нелинейчатые поверхности могут иметь постоянную и переменную образующую.
Рис. 70. Классификация поверхностей
Поверхности широко используются в практике. Например, линейчатая поверхность с плоскостью параллелизма – гиперболический параболоид – часто называют седлом представленная на рис. 71.
PDF created with pdfFactory Pro trial version www.pdffactory.com

46
Рис. 71. Гиперболический параболоид
В индивидуальных заданиях эпюров и курсовых работ используются торсовые поверхности, образованные движением прямолинейной образующей по окружности (цилиндры вращения и конусы вращения), а также нелинейчатые поверхности с постоянной образующей (сфера и торовые поверхности). Эти поверхности можно назвать простейшими поверхностями вращения.
Линейчатые развертываемые поверхности Торсовые поверхности
Торсовые поверхности образуются при движении прямолинейной образующей по криволинейной направляющей.
Если криволинейная направляющая окружность, то формируются поверхности вращения.
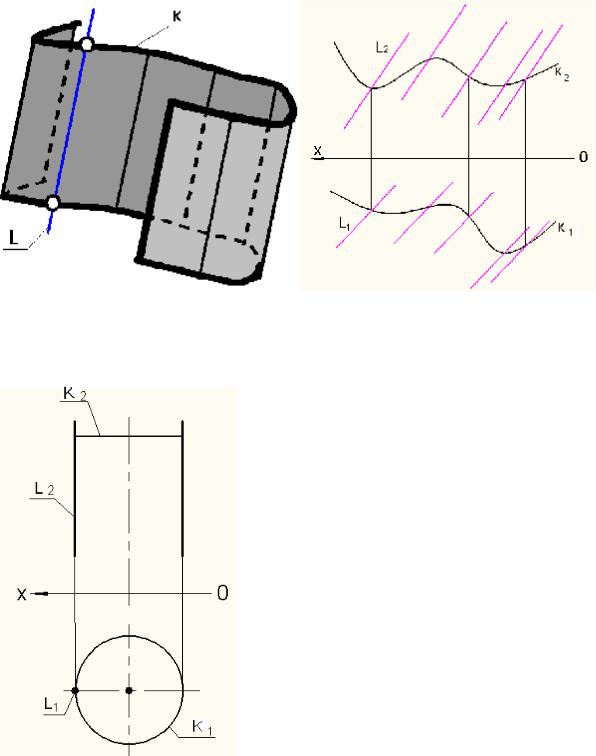
Цилиндрическая поверхность
В общем случае цилиндрическая поверхность (рис. 72) формируется при перемещении прямолинейной образующей L по криволинейной направляющей m. Определитель цилиндрической поверхности Ф (L, к)(A).
На рисунке 73 представлена цилиндрическая поверхность вращения. Определитель этой поверхности Ф (L, к)(A) или Ф (L, i)(Вращение).
PDF created with pdfFactory Pro trial version www.pdffactory.com
47
К – криволинейная направляющая, L – прямолинейная образующая
Рис. 72. Цилиндрическая поверхность
К – криволинейная |
направляющая |
i – ось вращения |
|
L – прямолинейная |
образующая |
Рис. 73. Цилиндрическая поверхность вращения
Коническая поверхность
В общем случае коническая поверхность (рис. 74) формируется при перемещении прямолинейной образующей L по криволинейной направляющей m и проходит в каждом положении через одну точку S, которую называют вершиной. На рисунке 75 представлена коническая поверхность вращения. Определитель этой поверхности Ф (L, к, S)(A) или Ф (L, i, S)(Вр).
PDF created with pdfFactory Pro trial version www.pdffactory.com

48
Рис. 74. Коническая поверхность
Рис. 75. Коническая поверхность вращения
Торсовая поверхность (поверхность с ребром возврата) рис. 76.
Поверхность с ребром возврата образуется при движении прямой, которая касается направляющей кривой (ребра возврата) в каждом своем положении. Определитель торсовой поверхности имеет вид Ф (К, L)(А).
PDF created with pdfFactory Pro trial version www.pdffactory.com

49
К – направляющая криволинейная (ребро возврата), L – образующая прямолинейная
L касается К
Рис. 76. Торсовая поверхность
Поверхности c плоскостью параллелизма
Поверхности с плоскостью параллелизма формируются при движении прямолинейной образующей по двум направляющим. В каждом своем положении образующая параллельна какой–либо плоскости, называемой плоскостью параллелизма.
Цилиндроид
Поверхность цилиндроида (рис. 77) формируется при движении прямолинейной образующей L по двум криволинейным направляющим К и m. Образующая L в каждом своем положении параллельна горизонтально- проецирующей плоскости параллелизма a.
Рис. 77. Поверхность цилиндроида
PDF created with pdfFactory Pro trial version www.pdffactory.com

50
Коноид
Поверхность коноида (рис. 78) формируется при движении прямолинейной образующей L по двум направляющим, одна из которых прямая линия m, другая кривая линия К. Образующая L в каждом своем положении параллельна горизонтально-проецирующей плоскости параллелизма a.
Рис. 78. Поверхность коноида
Гиперболический параболоид (Косая плоскость)
Поверхность гиперболического параболоида (рис. 79) формируется при движении прямолинейной образующей L по двум прямолинейным направляющим m и n, на рис. 79 плоскостью параллелизма гиперболического параболоида является фронтальная плоскость проекций П2.
Рис. 79. Гиперболический параболоид
PDF created with pdfFactory Pro trial version www.pdffactory.com