


1.МЕХАНИЧЕСКИЕ ДВУХПОЛЮСНИКИ
1.1.Определение механических двухполюсников
Линейные упругие и вязкие реологические элементы, испытывающие относительные поступательные перемещения концов под действием пары сил (силового диполя), являются двухполюсниками по терминологии теории электрических цепей и соответствуют ёмкости и сопротивлению. Сосредоточенную массу также можно представить двухполюсником, если в качестве второго полюса рассматривать инерциальную (здесь ― неподвижную) систему отсчета. На рис. 1.1, а показаны обозначения таких пассивных механических двухполюсников, причем в обозначении инерционного элемента присутствует система координат. Ее аналогом в теории электрических цепей будет являться индуктивность. Реологические уравнения для пассивных механических двухполюсников, связывающие силу с относительной скоростью перемещения полюсов, имеют следующий вид:
Qk = k∫vdt, Qr = rv, Qm = m |
dv |
. |
(1.1) |
|
|||
|
dt |
|
|
Далее будет рассматриваться колебательный характер движения точек (полюсов) динамической системы v = vsin(ωt +ϕ) , Q = Qsin(ωt +ϕ) , который
в теории колебаний обычно записывается в комплексной форме v = Re(vexp(iωt +ϕ)), Q = Re(Qexp(iωt +ϕ)) . Принимая комплексную форму
сил и скоростей в полюсах, (1.1) переписываются в виде
Q = −ik v, |
Q = rv, |
Q =imωv . |
(1.2) |
|
k |
ω |
r |
m |
|
|
|
|
|
|
Если рассматривается двухполюсник с произвольной линейной связью комплексных переменных Q и v
Q = Sv, v = LQ, |
L = S−1 , |
(1.3) |
то S называют полным комплексным |
сопротивлением, а |
L ― полной |
комплексной подвижностью этого двухполюсника. |
|
|
Наряду с пассивными рассматриваются также активные двухполюсники, являющиеся источниками вибронагрузки Q или виброскоростей v , обозначения для которых приведены на рис. 1.1, б.
5
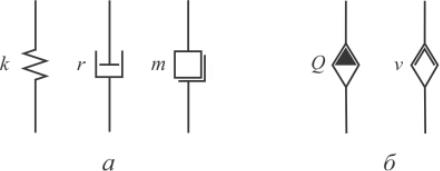
Рис. 1.1. Обозначения двухполюсников: а) ― пассивных (слева направо ― линейно-упругого с модулем k , линейно-вязкого с коэффициентом r и инерционного с массой m ); б) ― активных (слева направо ― источников вибронагрузки Q и виброскорости v )
При составлении схем (которые называются механическими цепями) условимся, что полюс, соответствующий соединению элементов, характеризуется одним значением скорости. При этом значения сил в разных плечах, соединенных вместе в рассматриваемом полюсе, будут различны. То есть скорости и силы в механических цепях аналогичны напряжениям и токам в электрических цепях.
Из этого соглашения следуют правила для нахождения полного комплексного сопротивления и полной комплексной подвижности в механических цепях параллельно либо последовательно соединенных механических двухполюсников.
Полное комплексное сопротивление и полная комплексная подвижность двухполюсника, образованного параллельным соединением механических двухполюсников с комплексными сопротивлениями
S |
, |
i =1,..., n |
(подвижностями L |
= S−1 |
, |
i =1,..., n), соответственно равны |
|
||
i |
|
|
i |
i |
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
|
|
|
S = ∑Si , |
|
L−1 |
= ∑L−i |
1 . |
(1.4) |
|
|
|
|
i=1 |
|
|
i=1 |
|
|
|
Полное комплексное сопротивление и полная комплексная подвижность двухполюсника, образованного последовательным соединением механических двухполюсников с комплексными
сопротивлениями |
Si , i =1,..., n |
(подвижностями |
|
соответственно равны |
|
|
|
|
n |
|
n |
|
L = ∑Li , |
S−1 |
= ∑Si−1 . |
|
i=1 |
|
i=1 |
|
|
6 |
|
Li = Si−1, i =1,..., n),
(1.5)
1.2. Построение механических цепей для колебательных систем
Построение механических цепей для колебательных систем с сосредоточенными параметрами не является тривиальной задачей. Рассмотрим этапы ее решения на примерах. В первом примере рассматривается осциллятор, состоящий из цепочки последовательно присоединенных к неподвижному кронштейну линейных упругого, вязкого и инерционного элементов. Источник вибронагрузки приложен к массе. В рассматриваемой колебательной системе существует три полюса с переменными Qi и vi , i =1,...,3. Очевидно, что механическая цепь имеет вид,
изображенный на рис. 1.2, а. Если масса соединена с неподвижным кронштейном параллельно соединенными линейными упругим и вязким элементами, то такая колебательная система будет иметь два полюса и механическую цепь, изображенную на рис. 1.2, б. По данному выше образцу могут быть построены механические цепи более сложных колебательных систем, приведенных на рис. 1.2, в‒з. Источник вибровозбуждения может быть идеальным источником вибронагрузки виброскорости (см. рис. 1.1, б), цепь, отвечающая определенной колебательной системе, от этого не зависит. На рисунках далее в основном будет использоваться обозначение для первого источника.
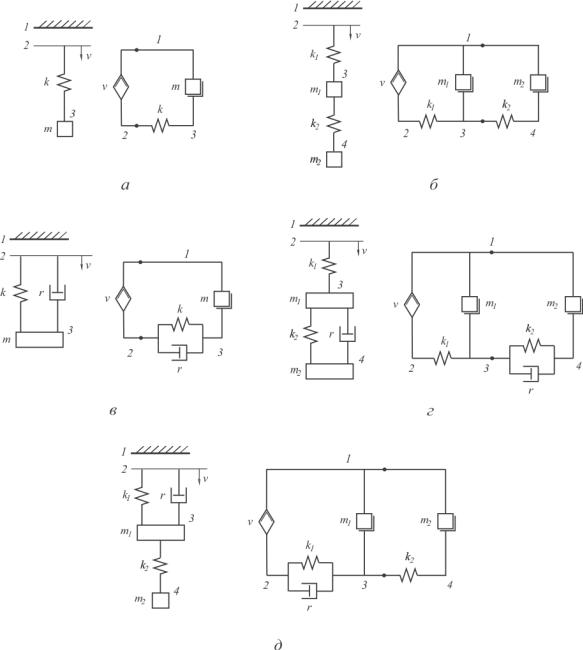
Рассмотрим ситуацию, когда точка соединения колебательной системы с неподвижной системой координат (точка подвеса) содержит источник вибровозбуждения (рис. 1.3). Для такой колебательной системы необходимо учитывать дополнительный полюс, связанный с инерциальной системой отсчета, относительно которого отсчитываются виброскорости, вибронагрузки и силы инерции звеньев с массой. Если источником вибровозбуждения являются колебания движущегося наземного транспорта из-за неровностей дороги, то это ― источник виброскорости. На рис. 1.3, а‒д приведены колебательные системы и отвечающие им механические цепи. Отметим, что звено, выделенное на рис. 1.3, а, отвечающее массе, прикрепленной к упругому элементу, прицепляется к полюсам цепей рис. 1.3, а, д, содержащих этот же элемент в колебательной системе. То же можно сказать и про звено, выделенное на рис. 1.3, в, отвечающее массе, прикрепленной к параллельно соединенным упругому и вязкому элементам, присутствующей в колебательной системе на рис. 1.3, г.
7
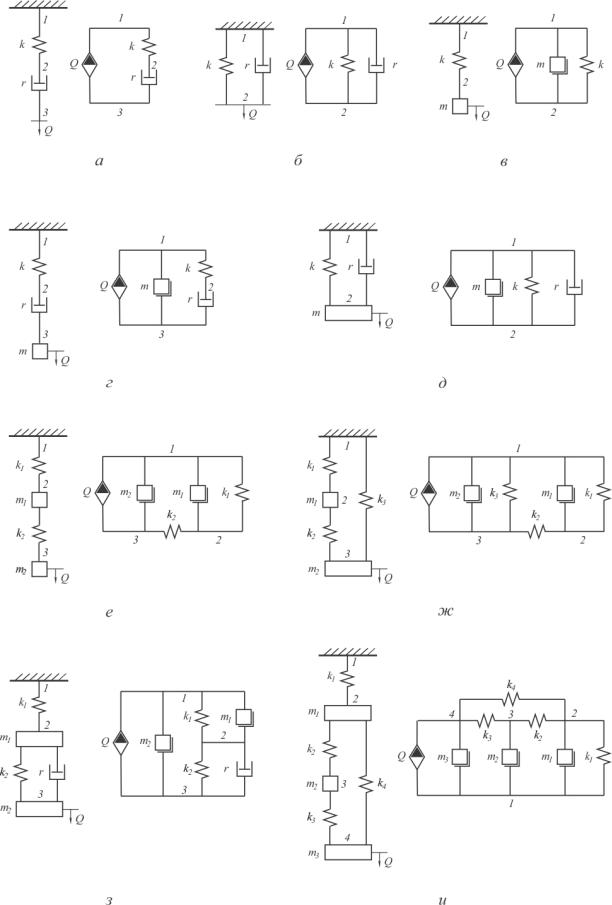
Рис. 1.2. Колебательные системы и их механические цепи
8
Декомпозицией сложные колебательные системы можно сводить к более простым. При этом необходимо уметь прикладывать источник вибровозбуждения в точке расчленения системы, которая является точкой подвеса, о чем говорилось выше. На рис. 1.4 изображена колебательная система с двумя точками подвеса, для которой, тем не менее, легко строится механическая цепь.
Механические цепи колебательных систем с двумя или более источниками вибронагрузки (рис. 1.5) строятся аналогично. Все рассматриваемые здесь источники полагаются имеющими одинаковые частоты и фазы.
Рис. 1.3. Механические цепи с источниками виброскорости
9