

22. Контроллер, базовая функция контроллера
Контроллер. Данное понятие широко распространено в вычислительной технике. Вообще, контроллер (от англ. to control - управлять) – это некое устройство, выполняющее функцию связи между ЭВМ и каким-либо внешним или периферийным объектом.
Применительно к АСУТП, контроллер – это электронное устройство с программным управлением и расширенными аппаратными возможностями измерения, управления и связи. Иначе говоря, контроллер представляет собой электронную схему, управляющую технологическим оборудованием, собирающую и анализирующую данные, на основе которых принимаются те или иные решения. Основное назначение контроллера – связь между уровнем датчиков и исполнительных механизмов и уровнем управляющих ЭВМ (серверов).
23. Схема контроллера, функциональный состав.
Конструктивно контроллер представляет собой отдельное устройство, имеющее собственное питание. Контроллер может, как правило, функционировать автономно. При этом контроллер выполняется защищенным от пыли, влаги, электромагнитных излучений.
В качестве локальных программируемых логических контроллеров (ПЛК) в настоящее время применяется большое количество устройств как отечественных, так и зарубежных производителей. Примерная структура ПЛК приведена на рисунке 3.
Блок согласования сигналов осуществляет электрическое согласование датчиков и исполнительных механизмов с входом блока преобразования сигналов.
Блок преобразования сигналов преобразует аналоговый электрический сигнал, поступающий от датчиков, в цифровую форму и передает его центральному процессору, а также преобразует
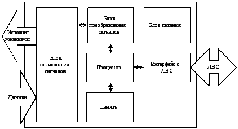
Рис. 3. Примерная структура ПЛК.