

10623
.pdf- 190 -
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rjj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rij |
|
|
|
|
а) |
|
r |
ii |
|
|
|
|
|
|
|
б) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||||||
|
θii=1 |
|
|
|
|
|
||||||||||||
|
|
|
rji |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
δjj=1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 состояние |
|||||
|
|
|
|
|
|
1 состояние |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.8
Работа первой группы сил на перемещениях второго состояния системы будет равна:
A12 = rii × qij + rji × δjj = rii × 0 + rji × 1 = rji.
Аналогично находим работу второй группы сил на перемещениях первого состояния:
A21 = rij × qii + rjj × δji = rij × 1 + rjj × 0 = rij.
Подставляя полученные выражения в (3.8), получим:
rij = rji . |
(3.11) |
Таким образом, теорема Релея утверждает, что реакция i-й связи от
единичного смещения j-й связи равна реакции j-й связи от единичного смещения i-й связи.
Примечания
1. Если вместо единичной силы в точке i приложить единичный момент, зависимость (3.10) примет вид:
δij = θij .
Как видим, удельные перемещения dij могут иметь различную размерность. Проще всего ее найти из (3.9), принимая в этом выражении ij за обобщенное перемещение, а Pj - за
обобщенную силу. Тогда [δij] = [ |
ij ] / [ Pj ] и мы получим: |
||
а) для силы, приложенной в точке j: |
|||
– |
[δij] = м/Н, если |
ij |
- линейное перемещение; |
– |
[δij] = 1/Н, если |
ij |
- угловое перемещение. |
б) для момента, приложенного в точке j: |
|||
– |
[δij] = м/(Нм) = 1/Н, если ij - линейное перемещение; |
||
– |
[δij] = 1/(Нм), если |
ij - угловое перемещение. |
|
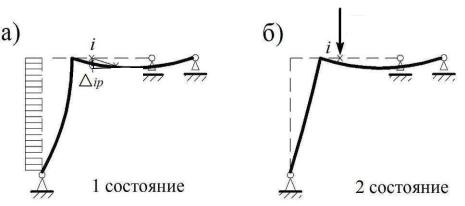
2. Приведенное доказательство теоремы Релея может показаться неубедительным. В самом деле, мы ссылаемся в нем на теорему Бетти, в которой рассматриваются два состояния одной и той же системы, загруженной различной нагрузкой. Можно ли это утверждать в отношении двух балок, изображенных на рис. 3.8, а и 3.8, б? Ответ на этот вопрос будет положительным, если учесть следующее:
а) принцип освобождаемости от связей справедлив в отношении как СОС, так и СНС;

- 191 -
б) если реакции связей СОС вторичны, то есть появляются только в ответ на действие активных сил и образуют с ними уравновешенную систему, то реакции связей СНС, вызванные кинематическими воздействиями, образуют самоуравновешенную систему сил;
в) напряженно-деформированное состояние заданной СНС, вызванное смещением i-й связи, тождественно НДС в эквивалентной упругой системе, полученной из заданной путем устранения этой i-й связи и загруженной активной силой, равной ее реакции.
Поскольку в нашем примере на рис. 3.8 речь идет о двух связях, для получения одной и той же системы нужно удалить обе. Если при этом число лишних связей заданной СНС будет меньше или равно двум, полученная система будет, очевидно, статически определимой или даже подвижной.
а) |
|
|
|
|
|
|
|
|
rjj |
|
rii |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
rij |
|||||
|
|
|
б) |
|
δ =1 |
|||||
|
θ =1 |
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
rji
Рис. 3.9
Итак, действительно две балки на рис. 3.8, а и 3.8, б можно рассматривать как два состояния одной и той же системы (рис. 3.9, а, б).
3.4. Работа внутренних сил плоской стержневой системы
Рассмотрим два состояния плоской стержневой системы, представленной рамой.
Обозначим через M1, Q1, N1 внутренние силы первого, а через M2, Q2, N2 – внутренние силы второго состояния. Последним будут соответствовать деформации κ2, γ2, ε2 и перемещения u2, v2, θ2 , связанные зависимостями из §1.3:
dN2/dx = – qx; |
|
(1.10′) |
||
dQ2/dx = |
qy; |
|
||
dM2/dx = |
Q2 . |
|
|
|
κ 2 = dθ2/dx; |
|
|
||
γ2 |
= θ2 – |
dv2/dx; |
|
(1.11′) |
ε2 |
= du2/dx . |
|
|
|
κ 2 |
= M2/EJ; |
|
|
|
γ2 |
= μQ2/GF; |
|
(1.12′) |
|
ε2 |
= N2/EF. |
|
|
|
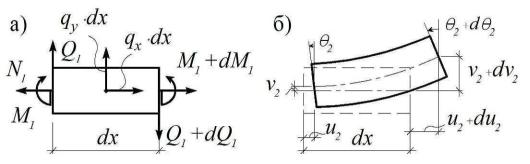
Напомним, что по отношению к элементу рамы длиной dx внутренние силы, несмотря на название, являются такими же внешними, как и равнодействующая распределенной нагрузки (рис. 3.10, а).
Вычислим работу внутренних сил M1, Q1, N1 на перемещениях второго состояния системы (рис. 3.10, б):
- 192 -
dA12 = − N1u2 + (N1 + dN1)(u2 + du2) + Q1v2 – ( Q1 + dQ1)(v2 + dv2) − M1θ2 +
+ (M1+ dM1)( θ2+dθ2) +qxdx(u2 + du2/2) + qydx(v2 + dv2/2) = − N1u2 + N1u2 + N1du2 + +{dN1u2}+ dN1du2 + Q1v2 − Q1v2 − Q1dv2 − {dQ1v2} − dQ1dv2 − M1θ2 +M1θ2 + M1dθ2 +
+ {dM1θ2} + dM1 |
dθ |
2 + qxdx(u2+du2/2) + qydx(v2+dv2/2). |
(3.12) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
а) |
|
|
|
|
qy·dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ2+dθ2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
qx·dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ2 |
|
|
||||||||||||||||||||
|
|
|
|
Q1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
M1 |
+ dM1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
N1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v2+dv2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
N1 |
+ dN |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2+du2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
dx |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Q1 + dQ1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.10
Пренебрегая в (3.12) подчеркнутыми слагаемыми как бесконечно малыми второго порядка и воспользовавшись соотношением (1.10) для членов в фигурных скобках, получим:
dA12 = N1du2 – { Q1dv2} + M1dθ2 – { qx dxu2}+ qx dxu2 + qxdxdu2/2 – { qy dxv2} +
+ qy dxv2 + qydxdu2/2 + Q1dxθ2. |
(3.13) |
Снова, отбрасывая в последнем выражении подчеркнутые слагаемые как бесконечно малые второго порядка и используя (1.11′) для второго члена, заключенного в фигурные скобки, будем иметь:
dA12 = N1ε2dx + M1κ2dx – Q1(θ2 – γ2)dx + Q1dxθ2 = |
|
= (M1κ 2 + Q1γ2 + N1ε2)dx. |
(3.14) |
Наконец, выражая в (3.14) деформации через внутренние усилия с помощью (1.12′), найдем для элемента рамы длиной ds:
dA12 = ( M1M2/EJ + μQ1Q2/GF + N1N2/EF ) ds.
Полная работа получается интегрированием по длине стержня и суммированием по всем участкам рамы. С учетом знака получим окончательное выражение работы внутренних сил первого состояния на перемещениях второго состояния:
W12 = − A12 = − Σ∫ ( M1M2/EJ + μQ1Q2/GF + N1N2/EF ) ds. |
(3.15) |
-193 -
3.5.Интеграл Мора-Максвелла
Спомощью (3.15) нетрудно получить формулу для определения перемещения i-й точки упругой системы от приложенной нагрузки.
Рассмотрим два состояния системы: первое – от заданной нагрузки и второе – от единичной силы или единичного момента, приложенных в точке i в направлении искомого линейного или, соответственно, углового перемещения (рис. 3.11). Обычно первое из этих состояний называют действительным, а
второе – возможным или виртуальным.
Pi =1
i'
Рис. 3.11
Обозначим через Dip искомое перемещение точки i – в нашем примере на рис. 3.11, а – это вертикальное линейное перемещение.
Пусть Mp, Qp, Np – внутренние усилия первого состояния, а`Mi, `Qi, `Ni – внутренние силы второго состояния.
Воспользовавшись теоремой Бетти:
A12 = A21,
где
A21 = Pi×Dip = 1×Dip = Dip,
а
A12 = – W12,
получим с помощью (3.15) искомую формулу для определения перемещений,
которая называется интегралом Мора-Максвелла:
Dip = S∫ ( Mp`Mi /EJ + mQp`Qi /GF + Np`Ni /EF )ds. |
(3.16) |
Таким образом, для определения линейного (углового) перемещения точки i упругой системы в заданном направлении от заданной нагрузки необходимо:
– построить эпюры Mp, Qp, Np в заданной системе от заданной нагруз-
ки;
-194 -
–построить эпюры `Mi, `Qi, `Ni от единичной силы (единичного мо-
мента), приложенной в точке i в направлении искомого перемещения;
– вычислить интеграл (3.16).
Отметим, что перемещения в балках и рамах определяются в основном изгибными деформациями, поэтому для таких систем вместо (3.16) можно воспользоваться формулой:
Dip = S∫ ( Mp`Mi /EJ)ds . |
(3.17) |
Наоборот, в фермах отсутствуют изгибающие моменты и поперечные силы, поэтому перемещения здесь полностью определяются продольными деформациями:
Dip = ∫ (Np`Ni /EF ) ds=S(Npk `Nik /EFk)lk, |
(3.18) |
где lk и EFk – соответственно длина и продольная жесткость k-го стержня фермы.
Примечания
1. Вычисление интеграла (3.17) условно называют перемножением эпюр Mp и`Mi и записывают это в виде: ip = (Mp ×`Mi).
2.При вычислении перемещений, как правило, пренебрегают деформациями сдвига.
3.При выводе формулы (3.16) нигде не предполагалось, что заданная система является статически определимой, поэтому эта формула верна как для СОС, так и для СНС. Тем не менее, в названии главы фигурируют только СОС поскольку, во-первых, пока в нашем распоряжении нет удобного метода определения внутренних усилий в СНС, а во-вторых, для последних систем формулу (3.16) можно упростить.
3.6. Формула Верещагина
Интеграл (3.17) можно вычислить аналитически, однако если жесткости стержней постоянны, удобнее воспользоваться другим способом, который обычно и применяют на практике.
Учитывая, что эпюра`Mi от единичного силового фактора является ку- сочно-линейной, можно выбрать промежутки [a,b], где она будет просто линейной. Тогда выбирая начало локальной системы отсчета так, как показано на рис. 3.12, б, ее уравнение можно записать в виде: `Mi(x) = tga×x. При этом интеграл в (3.17) примет вид:
b |
b |
|
( Mp`Mi /EJ)dx = (tga/EJ) ∫ x× Mp dx. |
|
|
∫ |
(3.19) |
|
a |
a |
|

- 195 -
Рис. 3.12
Обозначая через w площадь эпюры Mp:
b
w = ∫ dw = ∫ Mp dx ,
ωa
иучитывая, что ее статический момент относительно оси Oy равен:
Sy = ∫ xdw = w×xc,
ω
представим (3.19) в виде:
b |
x× Mp dx = (tga/EJ) ∫ xdw= (tga/EJ) xc×w = (wyc)/EJ, |
(tga/EJ) ∫ |
|
a |
ω |
где yc = tga×xc.
Возвращаясь к формуле (3.17), получим:
Dip = S (wkyck)/(EJk). |
(3.20) |
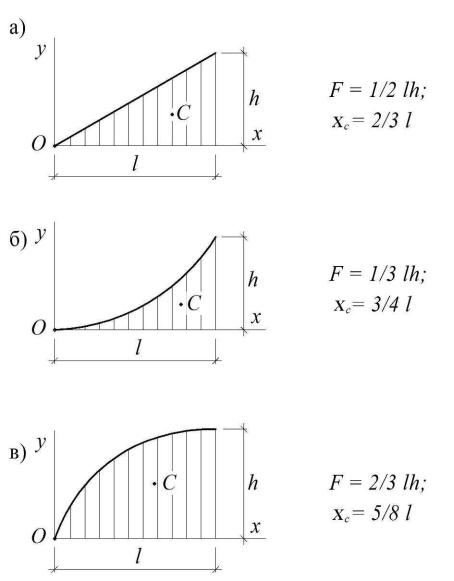
Таким образом, чтобы перемножить две эпюры, из которых хотя бы одна является линейной, нужно вычислить площадь криволинейной эпюры – w и умножить ее на ординату yc в линейной эпюре, вычисленную под центром тяжести криволинейной.
Для реализации формулы (3.20) остается рассмотреть геометрические характеристики стандартных эпюр (рис. 3.13), где две последние – соответствуют эпюрам от равномерно распределенной нагрузки. Поскольку любую нестан-
- 196 -
дартную эпюру можно представить комбинацией стандартных, с помощью последних можно перемножить произвольные эпюры.
Рис. 3.13
Примечания
1.При выводе формулы (3.20) криволинейная эпюра Mp с площадью ω предполагается однозначной. Если это условие не выполнено, ее представляют комбинацией двух или большего числа стандартных эпюр.
2.Для вычисления интеграла (3.17) можно применять формулы численного интегрирования, в том числе – формулу Симпсона:
b
∫ f (x)dx = [ (b – a)/6] {f(a) + 4f [ (a + b)/2] + f(b)},
a
которая позволяет получить точный результат, если функция f (x) является многочленом до третьей степени включительно.

- 197 -
Таким образом, если на всем промежутке [a,b] эпюра `Mi линейна, а эпюра Mp является квадратичной параболой, интеграл (3.17) можно вычислить по формуле:
Dip=S(lk/6EJk) {Mp(ak)× `Mi(ak) +4 Mp[ (ak +bk)/2]× `Mi[ (ak+bk)/2]+Mp(bk) × `Mi(bk) }. (3.21)
При этом однозначности эпюры Mp на промежутке [a,b] не требуется, а формулу можно, конечно, применять и для линейной функции Mp(x).
3.7. Примеры определения перемещений
Рассмотрим примеры определения перемещений в СОС от действующей нагрузки. Во всех случаях изгибная жесткость элементов системы – EJ и их продольная жесткость – EF предполагаются известными.
Пример 3.1. Определить максимальные прогибы балки (рис. 3.14, а).
Рис. 3.14
Решение. В соответствии с формулой (3.17) строим эпюру Mp от заданной
нагрузки (рис. 3.14, б) и эпюру `Mi от единичной силы, приложенной в середине балки (рис. 3.14, в).
Вычислим интеграл (3.17) по формуле Верещагина. На всем промежутке [0,l] эпюра Mp является однозначной, то есть отвечает предъявляемым к ней требованиям, а эпюра`Mi на всем промежутке [0,l] будет нелинейной. Поэтому область интегрирования делим на два участка: [0, l/2] и [l/2, l], на каждом из которых `Mi(x) будет линейной. С учетом симметрии получим:
vmax = Dip = 2 (w1× yc1)/EJ = 2 [(2/3)×( l/2)×(ql2/8)]×[(5/8)×(l/4)] = 5ql4/384EJ. |
· |

- 198 -
Для того чтобы получить тот же результат с помощью интегрирования дифференциального уравнения изогнутой оси балки нужно затратить примерно втрое больше усилий – хотя бы потому, что придется находить угол поворота балки в ее начальном сечении – q0.
Формально воспользовавшись для всего промежутка [0,l] формулой Симпсона (3.21) и учитывая, что значения Mp и`Mi на его концах равны нулю, получим:
vmax = (l/6EJ)×4(ql2/8)×(l/4) = ql4/48EJ.
Найденный результат оказался неверным, поскольку на всем промежутке [0,l] подынтегральная функция f(x) = Mp(x) × `Mi (x) не отвечает требованиям, предъявляемым к ней этой формулой.
Пример 3.2. Найти линейное и угловое перемещения точки A на конце Г- образной консольной рамы, у которой жесткость стойки вдвое больше жесткости ригеля (рис. 3.15, а).
Pв=1
Pг=1 |
M =1 |
|
Рис. 3.15
Решение. Строим эпюру Mp от заданной нагрузки и эпюры`Mi от единичных сил и моментов, приложенных в точке A (рис. 3.15, б– д).
Определяем вертикальное перемещение точки А, перемножая эпюры Mp и`M в:
Dв = (Mp ´`M в) = (1/EJ) w1× y1 + (1/2EJ) w2× y2 = (1/EJ)[(1/3)×l× (ql2/2)]×(3/4)l + + (1/2EJ) [l×(ql2/2)]×l = (3/8)(ql4/EJ).

- 199 -
Находим горизонтальное перемещение точки А:
Dг = (Mp ´`M г) = (1/2EJ) [l×(ql2/2)]×(l/2) = (1/8)(ql4/EJ).
Полное перемещение точки А составит:
___________ __
DА = Ö (Dв)2 + (Dг)2 = (Ö10 ql4)/8EJ.
Угол поворота сечения в точке А будет равен:
qА = (Mp ´`M у) = (1/EJ) w1×1 + + (1/2EJ) w2×1 = (1/EJ)[(1/3)×l× (ql2/2)]×1 + + (1/2EJ) [l×(ql2/2)]×1 = (5ql3/12EJ ). ·
Рассмотренный пример наглядно показывает, почему при определении перемещений в рамах мы пренебрегаем продольными деформациями: вертикальное перемещение точки А от заданной нагрузки в основном определяется изгибом ригеля, изгибом стойки и только в очень незначительной степени – ее сжатием.
Пример 3.3. Найти угол поворота сечения на правой опоре рамы, рассмотренной в примере 2.5, полагая EJ = const (рис. 2.9, а).
Mi =1
Рис. 3.16
Решение. Воспользуемся уже построенной ранее эпюрой Mp от заданной нагрузки (рис. 2.9, б) и (рис. 3.16, а), и умножим ее на эпюру`Mi от единичного момента (рис. 3.16, б). На левой стойке и ригеле эпюра Mp представлена тремя