


2.
Движения Материальной Точки по Окружности
Движение точки по окружности может быть очень сложным (рис. 17).
Рассмотрим подробно движение точки по окружности, при котором v = const. Такое движение называется равномерным движением по окружности. Естественно, вектор скорости не может быть неизменным (v не равно const), так как направление скорости постоянно меняется.
Время, за которое траектория точки опишет окружность, называется периодом обращения точки (Т). Число оборотов точки в одну секунду называется частотой обращения (v). Период обращения можно найти по формуле:
Естественно, перемещение точки за один оборот будет равно нулю. Однако пройденный путь будет равен 2ПиR, а при числе оборотов п путь будет равен 2ПиRn или 2ПиRt/T, где t - время движения.
Ускорение при равномерном движении точки по окружности направлено к ее центру и численно равно а = v2/R.
Это ускорение называется центростремительным (или нормальным). Вывод этого равенства может быть следующим. Приведем векторы скорости к одной точке хотя бы за - Т (можно и за Т/2 или Т) (рис. 18).
Тогда сумма изменений векторов скоростей за малые промежутки времени будет равна длине дуги АВ, которая равна модулю |v2 - v1| за время t = 1/4*Т.
Определим длину дуги. Поскольку радиусом для дуги будет модуль вектора v1=v2=v, то длина дуги l может быть вычислена как длина четверти окружности с радиусом v:
После сокращения получим: 
Если же движение равнопеременное, то v Ф const, тогда рассматривают другую составляющую ускорения, обеспечивающую изменение модуля скорости. Это ускорение называется тангенциальным:
Тангенциальное ускорение направлено по касательной к траектории, оно может совпадать по направлению со скоростью (движение равноускоренное) или быть противоположно направленным (движение равнозамедленное).
3.
Враща́тельное движе́—ниевид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения ротора генератора на электростанции неподвижна.
Углова́я ско́рость— векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
 ,
,
а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
Углово́е ускоре́—ниепсевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
При вращении тела вокруг неподвижной оси, угловое ускорение по модулю равно[1]:
Вектор углового ускорения α направлен вдоль оси вращения (в сторону  при ускоренном вращении и противоположно
при ускоренном вращении и противоположно  — при замедленном).
— при замедленном).
Существует связь между тангенциальным и угловым ускорениями:
 ,
,
где R — радиус кривизны траектории точки в данный момент времени. Итак, угловое ускорение равно второй производной от угла поворота по времени или первой производной от угловой скорости по времени. Угловое ускорение измеряется в рад/сек2 .
4.
Современная формулировка
В инерциальной системе отсчёта ускорение, которое получает материальная
точка, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе.
При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:
где  — ускорение материальной точки;
— ускорение материальной точки;
 — сила, приложенная к материальной точке; m — масса материальной точки.
— сила, приложенная к материальной точке; m — масса материальной точки.
Или в более известном виде:
В случае, когда масса материальной точки меняется со временем, второй закон Ньютона формулируется с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной
точки равна равнодействующей всех приложенных к ней сил.
где  — импульс точки,
— импульс точки,
где  — скорость точки;
— скорость точки;
t — время;
 — производная импульса по времени.
— производная импульса по времени.
Когда на тело действуют несколько сил, с учётом принципа суперпозиции второй закон Ньютона записывается:
или
Второй закон Ньютона действителен только для скоростей, много меньших скорости света и в инерциальных системах отсчёта. Для скоростей, приближенных к скорости света, используются законы теории относительности.
Нельзя рассматривать частный случай (при  ) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
5.
Инерциа́льная систе́ма отсчёта(ИСО) — система отсчёта, в которой справедлив закон инерции: все свободные тела (то есть такие, на которые не действуют внешние силы или действие этих сил компенсируется) движутся прямолинейно и равномерно или покоятся[1]. Эквивалентной является следующая формулировка, удобная для использования в теоретической механике[2]:
Инерциальной называется система отсчёта, по отношению к которой пространство является однородным и изотропным, а время — однородным.
В классической механике справедлив механический принцип относительности: законы динамики одинаковы во всех инерциальных системах отсчета.
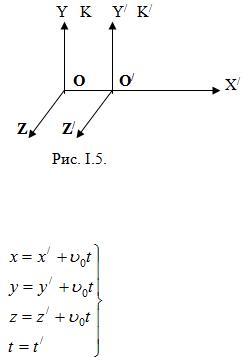
Рассмотрим две системы отсчета: инерциальную систему К (с координатами x, y, z), условно будем считать неподвижной, и систему К' (с координатами x', y', z'), движущуюся относительно К равномерно и прямолинейно со скоростью υ0 (υ0=const)
Координата точки А по отношению к системе К: х = х' + 00', за промежуток времени t от начала отсчета будет:
(3.19)
Уравнения (3.19) носят название преобразования координат и времени Галилея. Отсчет времени начат с момента, когда начало координат обеих систем совпадают. Продифференцировав по времени t, получим выражение правила сложения скоростей в классической механике: υ=υ'+υ0 (3.20)
Ускорения в обеих системах отсчета одинаковы, а это означает, что поведение тел в обеих системах одинаково: a=a' (3.21), т.е. из соотношения (3.21) вытекает подтверждение механического принципа относительности: уравнения динамики при переходе от одной инерциальной системы отсчета к другой не изменяются, т.е. являются инвариантными по отношению к преобразованиям Галилея. Механический принцип относительности можно сформулировать еще следующим образом: никакими механическими опытами, проведенными в данной инерциальной системе отсчета, нельзя установить, покоится ли
она или движется равномерно и прямолинейно. Например, сидя в каюте корабля, движущегося равномерно и прямолинейно, мы не можем определить, покоится корабль или движется, не выглянув в окно.
Преобразова́ния Галиле—́яв классической механике (механике Ньютона) преобразования координат и времени при переходе от одной инерциальной системы отсчета (ИСО) к другой[1]. Термин был предложен Филиппом Франком в 1909 году.[2] Преобразования Галилея подразумевают одинаковость времени во всех системах отсчета («абсолютное время»[3]) и выполнение принципа относительности (принцип относительности Галилея (см. ниже)).
•Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для скоростей, малых по сравнению со скоростью света в пустоте и в ограниченном объёме пространства. Для скоростей вплоть до порядка скоростей движения планет в Солнечной системе (и даже бо́льших), преобразования Галилея приближенно верны с очень большой точностью.
Если ИСО S движется относительно ИСО S' с постоянной скоростью  вдоль оси
вдоль оси  , а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:
, а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:
или, используя векторные обозначения,
(последняя формула остается верной для любого направления осей координат).
•Как видим, это просто формулы для сдвига начала координат, линейно зависящего от времени (подразумеваемого одинаковым для всех систем отсчета).
Из этих преобразований следуют соотношения между скоростями движения точки и её ускорениями в обеих системах отсчета:
•Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для малых скоростей  (много меньше скорости света).
(много меньше скорости света).
6.
Зако́н сохране́ния и́мпульсаЗако́( н сохране́ния количества движения) утверждает,
что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
Как и любой из фундаментальных законов сохранения, закон сохранения импульса описывает одну из фундаментальных симметрий, — однородность пространства.
ВыводизформализмаНьютона
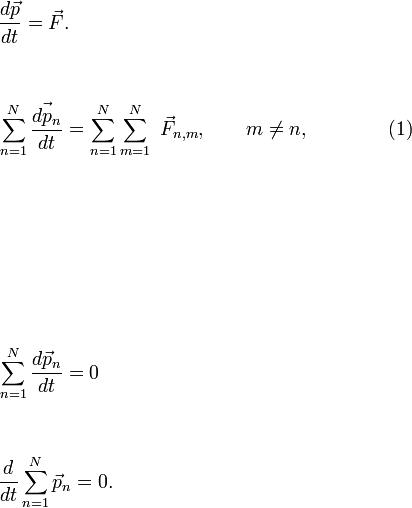
Рассмотрим выражение определения силы
Перепишем его для системы из N частиц:
где суммирование идет по всем силам, действующим на n-ю частицу со стороны m-ой. Согласно третьему закону Ньютона, силы вида  и
и  будут равны по абсолютному
будут равны по абсолютному
значению и противоположны по направлению, то есть  Тогда после подстановки полученного результата в выражение (1) правая часть будет равна нулю, то есть:
Тогда после подстановки полученного результата в выражение (1) правая часть будет равна нулю, то есть:
или
Как известно, если производная от некоторого выражения равна нулю, то это выражение есть постоянная величина относительно переменной дифференцирования, а значит:
(постоянный вектор).
То есть суммарный импульс системы частиц есть величина постоянная. Нетрудно получить аналогичное выражение для одной частицы.
Следует учесть, что вышеприведенные рассуждения справедливы лишь для замкнутой системы.
Также стоит подчеркнуть, что изменение импульса  зависит не только от действующей на тело силы, но и от продолжительности её действия.
зависит не только от действующей на тело силы, но и от продолжительности её действия.