

LAB4_W8LAST Нелинейные
.docЛАБОРАТОРНАЯ РАБОТА №4.
ИССЛЕДОВАНИЕ ВРЕМЕННЫХ ХАРАКТЕРИСТИК И АВТОКОЛЕБАНИЙ В нелинейных системАХ
1 Цель работы
Целью работы является экспериментальное и теоретическое исследование условий возникновения периодических автоколебательных режимов в нелинейных системах.
2 Теоретическая часть
2.1 Общая характеристика нелинейностей в САУ.
Нелинейной называется САУ, которая содержит хотя бы одно звено, описываемое нелинейным уравнением. Для нелинейного звена не справедлив принцип суперпозиции. Любую САУ, содержащую хотя бы один нелинейный элемент, можно представить простейшей структурой, состоящей из нелинейного элемента (НЭ) и линейной части (ЛЧ) с передаточной функцией W(s), включающей в себя линейные элементы исходной системы:

Рисунок 4.1 — Типовая эквивалентная структура нелинейной САУ
К типовым нелинейным относят элементы, характеристики которых могут быть представлены кусочно-линейными кривыми: "гистерезис", "насыщение", "зона нечувствительности", "реле", и др. (рисунок 4.2). К особым нелинейным звеньям относятся множительные звенья, делительные звенья, селекторы алгебраических величин и пр.
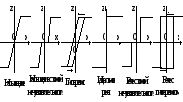 Рисунок
4.2 — Типовые нелинейные элементы
Рисунок
4.2 — Типовые нелинейные элементы
2.2 Понятие об устойчивости нелинейных систем
Для нелинейных САУ существует ряд понятий устойчивости в зависимости от размеров области начальных отклонений, от состояния равновесия и наличия внешних воздействий. Невозмущенным движением системы называется одно из возможных расчетных движений САУ при некоторых определенных начальных условиях и заданном внешнем воздействии. Всякое другое движение называется возмущенным. Можно считать, что любое возмущенное движение получается за счет приложения к системе кратковременного внешнего возмущения при t=0. Состояние равновесия и установившийся режим автоколебаний можно рассматривать как важные частные случаи невозмущенных движений автономной системы.
Различают устойчивость в малом, в большом и в целом. Движение устойчиво в малом, если условия устойчивости выполняются лишь в малой окрестности равновесия, т.е. при малых начальных отклонениях. Если же движение устойчиво при начальных отклонениях, которые превышают определенный уровень, то его принято называть устойчивым в большом. Движение устойчиво в целом, если оно устойчиво при любых начальных отклонениях, т.е. не зависит от них.
2.3 Метод гармонической линеаризации.
Для исследования возможности появления автоколебаний в нелинейных системах (рисунок 4.3) используется метод гармонического баланса, основанного на гармонической линеаризации нелинейного элемента. В общем случае, при подаче на вход нелинейного элемента гармонического сигнала на его выходе будет негармонический сигнал, содержащий высшие гармоники при разложении в ряд Фурье. При этом основной вклад в появление автоколебаний в замкнутой нелинейной САУ вносит только первая гармоника выходного сигнала нелинейного элемента z(t) = A1 · sin(t) + B1 · cos(t).

Рисунок 4.3
Для нелинейного элемента вводится комплексный коэффициент усиления Wн(Xm), равный выраженному в комплексной форме отношению амплитуд 1-ой гармоники выходного сигнала z(t) и входного воздействия x(t):
 (4.1)
(4.1)
где амплитуда Wн(Xm) равна отношению Zmi/Xm, а аргумент — сдвигу фаз между входным сигналом и 1–ой гармоникой выходного сигнала. Переходя к алгебраической форме записи, можно представить Wн(Xm) в виде:
Wн(Xm) = q(Xm) + q'(Xm) (4.2)
где q(Xm) и q'(Xm) называются коэффициентами гармонической линеаризации. Можно показать, что в случае однозначной нелинейности z=F(x):
q'(Xm)=0, т.е. = 0 (4.3)
Для нелинейности типа "ограничение" ("насыщение"):

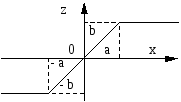 ,
,
 (4.4)
(4.4)
Рисунок 4.4
И з
полученного выражения можно найти
комплексный коэффициент усиления
элемента с релейной характеристикой (
a
0 ):
з
полученного выражения можно найти
комплексный коэффициент усиления
элемента с релейной характеристикой (
a
0 ):
![]() (4.5)
(4.5)
Рисунок 4.5
2.4 Метод гармонического баланса
Найдем те условия, при которых в замкнутой системе (рисунок 4.6) возникают автоколебания.

Рисунок 4.6
Основное уравнение:
![]() (4.6)
(4.6)
Это уравнение соответствует прохождению АФХ разомкнутой системы через точку (-1,j0). В свою очередь, данное уравнение распадается на два:
Ym1 = Xm, баланс амплитуд;
= ; баланс фаз. (4.7)
Это уравнения гармонического баланса. Фактически первое условие можно рассматривать как уравнение с двумя неизвестными и Xm. Если решение уравнения существует, то оно дает амплитуду и частоту возможных автоколебаний. Уравнение автоколебаний удобно решать графически (рисунок 4.7) — по Л.С. Гольдфарбу. Для этого необходимо переписать данное уравнение следующим образом:
![]() (4.8)
где левая часть уравнения представляет
собой АФХ линейной части системы, а
правая — обратную АФХ нелинейного
элемента (для 1–ой гармоники), взятую с
обратным знаком и построить их на одном
графике. Их пересечение определит
амплитуду и частоту возможных
автоколебаний. Вообще говоря, следует
иметь в виду, что не каждое из найденных
решений соответствует устойчивым
автоколебаниям, которые восстанавливаются
после кратковременных возмущений.
(4.8)
где левая часть уравнения представляет
собой АФХ линейной части системы, а
правая — обратную АФХ нелинейного
элемента (для 1–ой гармоники), взятую с
обратным знаком и построить их на одном
графике. Их пересечение определит
амплитуду и частоту возможных
автоколебаний. Вообще говоря, следует
иметь в виду, что не каждое из найденных
решений соответствует устойчивым
автоколебаниям, которые восстанавливаются
после кратковременных возмущений.



Рисунок 4.7
Л.С.Гольдфарб, используя критерий Найквиста, получил следующий критерий устойчивости автоколебаний. Будем двигаться по кривой -1/WН(Xm) в направлении возрастания Xm (рисунок 4.7). Если разомкнутая линейная система устойчива (или находится на апериодической границе устойчивости), то той точке пересечения характеристик WЛ(j) и -1/WН(Xm), в которой мы входим в контур АФХ линейной части (т.А), соответствует неустойчивое периодическое решение, а в точке же выхода из контура (т.В) решение устойчиво и эта точка определяет параметры автоколебаний. Показано, что для однозначных характеристик этот критерий является необходимым, но недостаточным, хотя в практических задачах он приводит к правильным результатам. Если характеристики WЛ(j) и -1/WН(Xm) не пересекаются, то решение уравнения (4.8) не существует и автоколебания синусоидальной формы в системе не возможны.
3 Порядок выполнения работ
1. Ввести структурные схемы линейной и нелинейной САУ 2-го порядка (рисунок 4.8).


Рисунок 4.8
2. Коэффициент усиления К пропорционального регулятора установить равным К=0.525.
3. Построить форму выходных сигналов y(t) на выходах линейной и нелинейной систем при уровне задающего ступенчатого воздействия g(t)=1,10,100 в каждом случае на одном графике для обеих систем. Построить зависимости времени регулирования от величины задающего воздействия tрег=f(g).
4. Зарисовать фазовую траекторию САУ в координатах (х,у) для каждого из трех рассмотренных выше случаев.
5. Ввести структурные схемы линейной и нелинейной САУ 3-го порядка (рисунок 4.9).


Рисунок 4.9
6. Построить на одном графике форму выходных сигналов y1(t) на выходах линейной и нелинейной систем при уровне задающего ступенчатого воздействия g(t)=10.
7. Построить на одном графике выходные сигналы (форму автоколебаний) систем при значении коэффициента усиления пропорционального регулятора К=5.25 при g(t) 0. Измерить амплитуду и частоту автоколебаний в нелинейной системе. Исследовать влияние на них значения K.
8. Ввести структурную схему САУ 2-го порядка с нелинейностью типа "гистерезис" (рисунок 4.10).

Рисунок 4.10
8. Зарисовать форму автоколебаний (K=5.25) на выходе системы при B=1. Снять зависимость амплитуды А и частоты этих автоколебаний при B=0.1,1,10,100. Построить графики зависимостей функций от параметра В — ширины петли гистерезиса: A = f1(B), = f2(B). Исследовать влияние коэффициента усиления K.
4 Расчетная часть
1. Для замкнутой схемы САУ на рисунке 4.8 найти передаточную функцию замкнутой системы f(S), рассматривая поведение системы "в малом" (нелинейный элемент работает на линейном участке характеристики). Оценить время регулирования САУ.
2. Для структурной схемы САУ на рисунке 4.9 построить:
а) АФХ линейной части W(j);
б) зависимость инверсного коэффициента передачи нелинейного элемента от амплитуды автоколебаний: -1/W(A). С помощью метода Гольдфарба определить амплитуду и частоту автоколебаний на входе нелинейного элемента для g(t) = 0 и К=5.25.
3. Для структурной схемы САУ на рисунке 4.10 с помощью метода Гольдфарба найти амплитуду и частоту автоколебаний на входе нелинейного элемента для одного из значений параметра В.
5 Требования к отчету
1. Название и цель работы.
2. Структурные схемы исследуемых САУ.
3. Графики переходных процессов, результаты моделирования.
4. Расчетная часть.
5. Выводы.
6 Контрольные вопросы
1. Какие типовые нелинейные элементы Вы знаете ?
2. Каковы особенности рассмотрения устойчивости нелинейных систем ?
3. Какие виды устойчивости характерны для нелинейных систем ?
4. Каковы основные допущения метода гармонической линеаризации ?
5. В чем отличие коэффициентов гармонической линеаризации для однозначных и неоднозначных нелинейных характеристик ?
6. Каковы условия возникновения автоколебаний в нелинейных системах?
7.Как формулируется критерий устойчивости автоколебаний Гольдфарба?
Список литературы
-
Попов Е.П. Теория линейных систем автоматического регулирования и управления. Учеб. пособие для втузов. – 2–е изд., перераб. и доп.. — М.: Наука, Гл. ред. физ.–мат. лит., 1989.— 304с.
-
Основы теории автоматического управления / В.С.Булыгин, Ю.С.Гришанин, Н.Б.Судзиловский и др. Под ред. Н.Б.Судзиловского. - М.: Машиностроение, 1985г. -512с.
-
Теория автоматического управления: Учеб. для вузов по спец. “Автоматика и телемеханика”. В 2–х ч. Ч.II Теория нелинейных и специальных систем автоматического управления. // А.А.Воронов, Д.П.Ким, В.М.Лохин и др.; Под. ред. А.А.Воронова. — 2–е изд., перераб. и доп. — М.: Высш. шк., 1986. — 504 с.