

8. Сопоставление данных системы, выводы по работе
|
№п/п
|
Показатель системы регулирования |
По ТЗ |
Полученное по расчету |
|
1 |
Диапазон
регулирования скорости, Д |
|
|
|
2 |
Статизм по задающему воздействию, Sз |
|
|
|
3 |
Статизм
по возмущению Мс,S |
|
|
|
4 |
Перерегулирование
при отработке ступенчатого сигнала
задания Uз, |
|
|
|
5 |
Время переходного процесса при отработке ступенчатого сигнала задания, tnn,c |
|
|
|
6 |
Число колебаний выходной координаты при отработке ступенчатого сигнала задания, nк |
|
|
По результатам расчетов в курсовой работе составлена таблица 3 показателей замкнутой системы электропривода.
Синтезированная система электропривода полностью (не полностью) удовлетворяет техническому заданию.
9. Литература
1. Грехов В.П., Зарицкий М.Н., Ключникова Г.А., Куприков А.В. Теория автоматического управления (конспект лекций). - М: МГОУ, 2002.
2. Терехов В.М. Элементы автоматизированного электропривода. - М: Энергоиздат, 1987.
Приложение 8
Двигатель постоянного тока, как колебательное звено
В некоторых случаях оказывается, что в структурной схеме двигателя постоянного тока Тм<4Тя.Тогда характеристическое уравнение передаточной функции двигателя имеет комплексные сопряженные корни вида
![]()
В этом случае с динамической точки зрения двигатель представляет собой колебательное звено, передаточную функцию которого целесообразно записать в следующем виде
![]()
где Te=![]() - эквивалентная постоянная времени
колебательного звена;
- эквивалентная постоянная времени
колебательного звена;
![]() - частота недемпфируемых колебаний;
- частота недемпфируемых колебаний;
![]() - коэффициент демпфирования колебаний.
- коэффициент демпфирования колебаний.
Обычно для электроприводов постоянного
тока значение коэффициента демпфирования
оказывается достаточно велико
![]() >0,8.
Тогда приближенно передаточную функцию
двигателя можно записать в следующем
виде
>0,8.
Тогда приближенно передаточную функцию
двигателя можно записать в следующем
виде
![]()
ЛАЧХ этой передаточной функции имеет
две асимптоты с наклонами О![]() дек и -
дек и -
40![]() б/дек
с частотой сопряжения
б/дек
с частотой сопряжения![]() и
ЛФЧХ, изменяющуюся в пределах от 0° до
-180°со сдвигом на частоте среза равным
-90 . На рис.6 приведены упрощенные ЛАЧХ
и ЛФЧХ двигателя постоянного тока, для
случая, если корни его характеристического
уравнения комплексные сопряженные.
и
ЛФЧХ, изменяющуюся в пределах от 0° до
-180°со сдвигом на частоте среза равным
-90 . На рис.6 приведены упрощенные ЛАЧХ
и ЛФЧХ двигателя постоянного тока, для
случая, если корни его характеристического
уравнения комплексные сопряженные.

Вопросы к защите курсовой работы
1. Какими показателями характеризуется точность системы регулирования скорости в установившемся режиме работы.
2. Как классифицируются сигналы, воздействующие на систему регулирования
3. Как формулируется определение передаточной функции динамического звена или системы регулирования.
4. Как формулируется определение переходной функции динамического звена или системы регулирования.
5. Какими показателями характеризуется переходная функция динамического звена или системы регулирования.
6. Каким соотношением взаимосвязаны время переходного процесса при отработке ступенчатого задающего воздействия в замкнутой системе регулирования и частота среза ЛАЧХ разомкнутого контура регулирования.
7. Как взаимосвязаны перерегулирование
в переходном процессе отработки
ступенчатого задающего воздействия в
замкнутой системе регулирования и запас
по фазе на частоте среза
![]() срв разомкнутом контуре.
срв разомкнутом контуре.
8. Как влияет наклон низкочастотной части ЛАЧХ разомкнутого скорректированного контура регулирования на точность замкнутой системы регулирования.
9. Какие системы регулирования называются статическими по характеру отработки входных воздействий.
10. Какие системы регулирования называются астатическими по характеру отработки входных воздействий.
11. По какой передаточной функции замкнутой системы регулирования можно определить её статизм или порядок астатизма.
12. Что положено в основу вычисления расчётного коэффициента усиления усилителя Курв контуре регулирования системы синтезируемого электропривода.
13. Каким образом находится передаточная функция корректирующего устройства в контуре регулирования синтезируемого электропривода.
14. Какие требования предъявляются к среднечастотной части ЛАЧХ скорректированного контура регулирования, обладающего хорошими динамическими показателями.
15. В виде каких динамических звеньев представляется двигатель постоянного тока в курсовой работе.
16. Какими динамическими параметрами характеризуется двигатель постоянного тока в исходной структурной схеме синтезируемой системы электропривода.
17. От какого источника питается якорь двигателя в синтезируемой системе электропривода.
18. Как формулируется определение понятия «диапазон регулирования скорости» в замкнутой системе электропривода.
19. Какие внешние возмущения действуют на замкнутую систему регулирования скорости.
20. Как формулируется понятие «задающий сигнал в замкнутой системе регулирования».
21. В каком документе задаются желаемые показатели замкнутой системы регулирования.
22. Какими основными показателями характеризуется замкнутая система регулирования скорости.
23. Каким образом реализуются корректирующие звенья в замкнутых контурах регулирования.
Приведите примеры схемотехнических решений.
24. Куда и каким образом перенесён сигнал возмущения по моменту нагрузки Мсв исходной структурной схеме двигателя постоянного тока.
U1
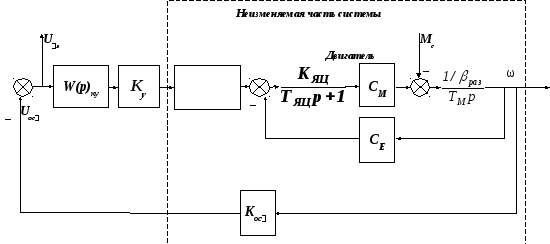



Рис.2 Структурная схема замкнутой системы электропривода

Рис. 3 Расчетная структурная схема системы электропривода