

19.Амплитудная характеристика системы автоматической регулировки усиления. Параметры системы автоматической регулировки усиления.
Обобщенная структурная схема обратной АРУ.

Если на входе приёмника присутствует слабый сигнал, то и напряжение на выходе линейного тракта невелико. Напряжение задержки срабатывания АРУ запирает амплитудный детектор и на выходе детектора напряжение равно нулю.
Управляющее воздействие в виде напряжения которое поступает на входы каскадов и преселектора УПЧ равно нулю и коэффициент передачи линейного тракта максимален. Приёмник имеет высокую чувствительность. При повышении уровня входного сигнала повышается и уровень выходного сигнала. Как только напряжение на выходе достигнет заданного уровня, при котором обеспечивается нормальная работа демодулятора, амплитудный детектор открывается, на его выходе формируется напряжение пропорциональное уровню сигнала. После фильтрации и усиления в УПТ управляющее воздействие поступает на входы каскадов линейного тракта, в них происходит уменьшение коэффициента передачи.
Чем больше уровень входного сигнала, тем больше и уровень выходного сигнала и тем больше управляющее воздействие => тем меньше коэффициент усиления линейного тракта.
Необходимо отметить, что выходное напряжение линейного тракта меняется, однако в значительно меньшей степени чем входное.
Рассмотрим амплитудную характеристикулинейного тракта охваченной системой АРУ (автоматической регулировки усиления).
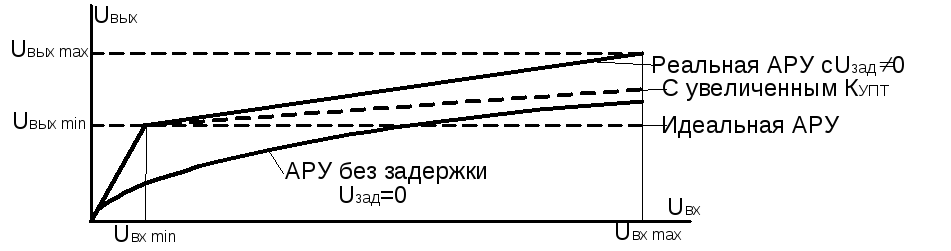
С целью снижения стоимости приёмника иногда используют АРУ без напряжения задержки срабатывания системы, что соответствует напряжению задержки равному нулю => снижается чувствительность приёмника.
Иногда, с целью снижения стоимости приёмника исключают УПТ из петли приёмника (не усиленное АРУ), при этом увеличивается динамический диапазон выходного напряжения.
Система АРУ характеризуется:- динамическим диапазоном входного напряжения (αВХ); И динамическим диапазоном выходного напряжения (αВЫХ).
![]()
![]()
Чем больше αВХи меньшеαВЫХ, тем в больших пределах должен меняться коэффициент усиления линейного тракта.
Введём понятие динамического диапазона(по коэффициенту усиления)
![]() ,где К – коэффициент усиления.
,где К – коэффициент усиления.
![]()
Если величина Gочень велика, то эту величину не удаётся реализовать на одном управляющем каскаде линейного тракта. В этом случае приходиться использовать несколько управляющих каскадов.
 ,гдеGi–
динамический диапазон по коэффициенту
передачиi– того
регулируемого каскада.
,гдеGi–
динамический диапазон по коэффициенту
передачиi– того
регулируемого каскада.
Регулировка коэффициента передачи отдельного каскада линейного тракта сопровождается изменением многих характеристик каскада. В частности изменяются: коэффициент нелинейных искажений; входное и выходное сопротивления каскада => нарушается согласование каскада с соседними устройствами. Поэтому регулировку коэффициента передачи каскада ограничивают, ориентируясь на допустимую степень ухудшения характеристик каскада.
Чтобы реализовать требуемую величину динамического диапазона используется несколько регулирующих каскадов. Регулировку коэффициента передачи стараются осуществить ближе ко входу приёмника, т.к. в этом случае уровни сигнала и помех и уровни нелинейных искажений также невелики.
Стараются не затрагивать смеситель регулировкой усиления, т.к. при этом может в значительной степени упасть избирательность по побочным каналам приёма.