

3. Волновые передачи
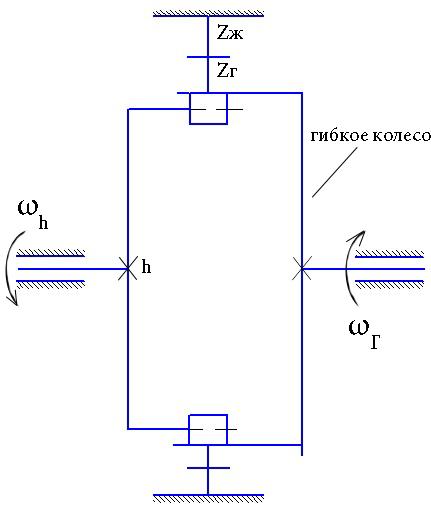
Отличительный признак – наличие в передаче хотя бы одного колеса специально деформируемого в процессе зацепления.
|
|
h – генератор волн | |
|
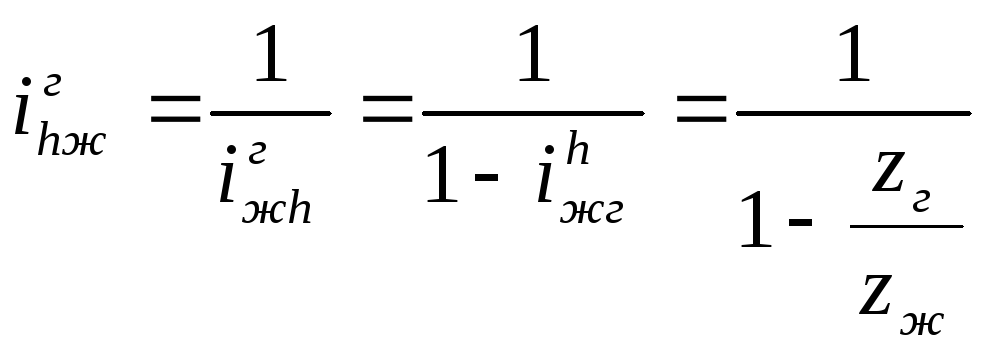
Для двухволнового генератора zm-zn=2 (min разность) | ||
|
| ||
|
|
|
|
|
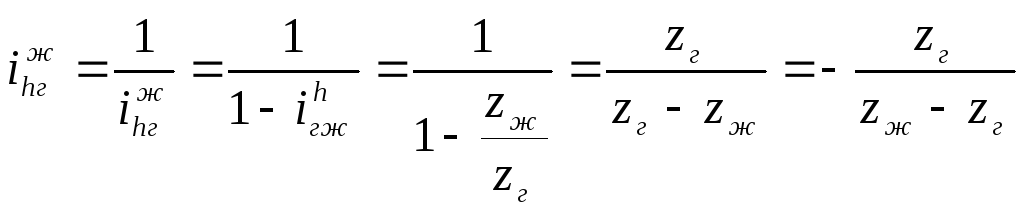
Если неподвижно гибкое колесо: | ||
|
| ||
|
|
| |

Достоинства:
1. Высокий кинематический эффект.
2. Высокий КПД.
3. Простота монтажа
4. Плавность передачи, способность передать вращение через перегородку
Недостатки:
1. Сложность изготовления гибкого колеса
2. Относительная маломощность
3. Невозможность получения небольших передаточных отношений
4. Качество смазки, и трудность подбора материала колеса (нагрузочная цикла)
Синтез зубчатых механизмов.
Важнейшая задача синтеза обеспечить для пары колес постоянство передаточного отношения, причем не только для полного оборота,
![]() но
и для бесконечно малых углов поворота
но
и для бесконечно малых углов поворота
Для ступенчатых рядных механизмов
i12 > i23 > i34 и тд. (Это необходимо для уменьшения габаритов). Для планетарных механизмов необходимо дополнительно 3 условия:
Условие соосности (оси центровых колес и водила должны совпадать) для передач А: zа + zд = zв – zд ; Б: zа + zд = zв – zf (при равных модулях)
Условие соседства: вершины зубьев соседних симметрично расположенных сателлитов не должны соприкасаться (это накладывает ограничение на число сателлитов). При nw = 3– это условие выполняется автоматически.
Условие сборки: зубья сателлитов должны входить во впадины между зубьями центральных колес.
Для (А) =>
![]() ,
где Ц – целое
число (особо жестко для этого типа П.П.)
,
где Ц – целое
число (особо жестко для этого типа П.П.)
(В), (Д), ЗК =>
![]() ;
;
![]() ;
;
![]()
Основной закон зацепления
Отмечалось, что важнейшей задачей синтеза является обеспечение
![]() в
этом случае
в
этом случае
![]()
|
|
ω (полюс зацепления) он один для заданного i |
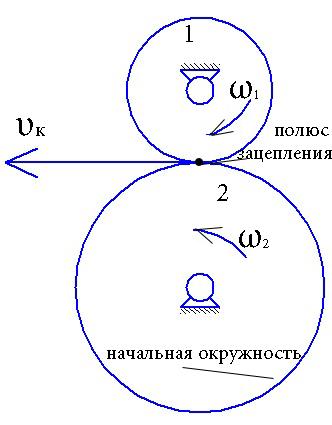
Пусть передача вращения осуществляется звеньями с профилями П1 и П2
|
|
Точка К – точка контакта t-t – общая касательная к профилю N-N – общая нормаль, пересекает линию центров О1О2 в некоторой точке W | |
|
Проекции этих скоростей на N-N должны быть одинаковыми (условие правильного зацепления) | ||
|
|
(1) | |
|
Действительно,
другого быть не может, если
Скорость
| ||
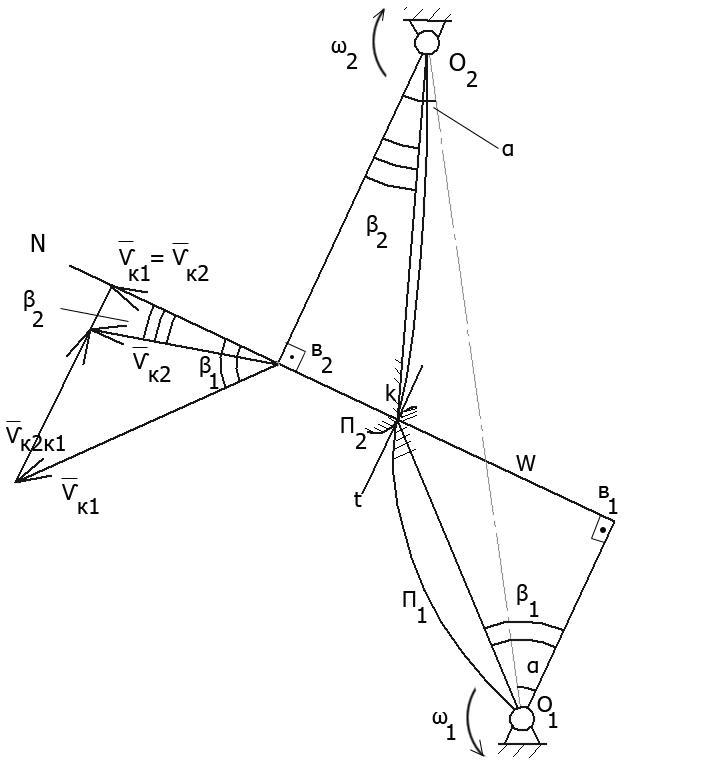
![]() ;
;
![]()
Мы
видим, что
![]() ;
;
![]()
С учетом равенства (1) получим
![]()
Или
-

(2) поскольку ∆b2O2W подобен ∆b1O1W
То
 тогда
тогда
(3) – основной закон зацепления
- Общая нормаль N-N к профилям П1П2 в точке контакта К делит линию центров О1О2 (внешним или внутренним образом) в отношении обратном отношению угловых скоростей.
Другими словами: если мы хотим чтобы i12 = const, то общая нормаль в точке касания профилей всегда должны проходить через заданный полюс зацепления W.
Кроме этого основного кинематического требования , при выборе кривых П1 и П2 необходимо учитывать и другие:
А) Динамические (зубья должны иметь достаточную прочность и передавать постоянную мощность без резких изменений усилий)
Б) Технологические (зубчатые колеса должны быть просты в изготовлении)
В) Эксплуатационные (передачи должны быть долговечными, простыми в монтаже, бесшумными и компактными).
В качестве кривых образующих профиль зубчатых колес используется циклоидальные кривые, дуги окружности, но такие кривые используются редко т.е. сложны в изготовлении и чувствительны к ошибкам сборки, являются парными т.е. работают в одном сочетании чисел зубьев.
Эвольвенты окружностей – колеса с такими зубьями наиболее просты в изготовлении и непарные. Передачи мало чувствительные к ошибкам изготовления и сборки. Поэтому в настоящее время наиболее широко применяемы.
Дадим понятие эвольвенты окружности
|
|
Важные свойства эвольвенты: 1.Все точки эвольвенты, кроме одной, находятся вне основной окружности. 2. Точка В является мгновенным центром скоростей прямой N-N и центром кривизны эвольвенты в точке K, т.е. N-N является нормалью KB – радиус кривизны. 3. Форма эвольвенты зависит только от радиуса основной окружности , чем больше радиус тем меньше кривизны эвольвенты. Поэтому рейка эвольвентного зацепления имеет трапецеидальный профиль. |

Сущность эвольвентного зацепления можно продемонстрировать на примере перематывания нити (нерастяжимой) с барабана на барабан.
|
|
Любая
точка К на отрезке b1b2
имеет постоянную скорость
Но
если рассмотреть движение точки K
в координатах системы жестко связанных
с барабаном то она будет описывать
эвольвенты Э1 и Э2 которые различны
если
|

Основные параметры прямозубых цилиндрических колес
dн – начальная окружность (касание в полюсе зацепление (.) W)
dосн – dнcosα - диаметр основной окружности
α – угол зацепления 20о
Pt – шаг зацепления по делительной окружности
m – модуль зацепления
окружности выступов и впадин (da, df)
коэффициент перекрытия
![]()
Для
гарантированного безударного зацепления
необходимо чтобы
![]() , чем больше
, чем больше
![]() тем выше плавность работы передачи.
тем выше плавность работы передачи.
![]() численно равен среднему числу пар зубьев
одновременно находящихся в зацеплении
численно равен среднему числу пар зубьев
одновременно находящихся в зацеплении
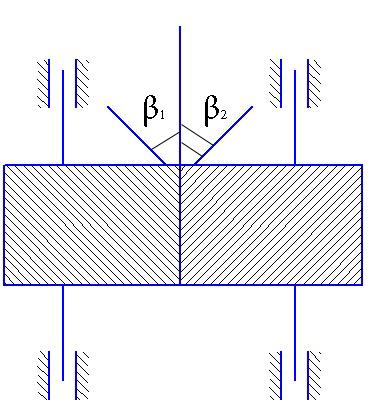
Косозубые передачи с параллельными осями валов.
|
|
В
косозубых передачах с параллельными
осями валов углы наклона винтовой
линии зуба к начальному цилиндру
должны быть равны по величине и
противоположны по направлению
|
Кинематические зависимости для косозубых колес такие же как и для прямозубых
В соответствии с расположением секущей плоскости на косозубом колесе различают торцевой Pt, нормальный Pn, и осевой Px шаги и соответствующие им модули mt, mn и mx cвязь между которыми очевидна.
|
|
|
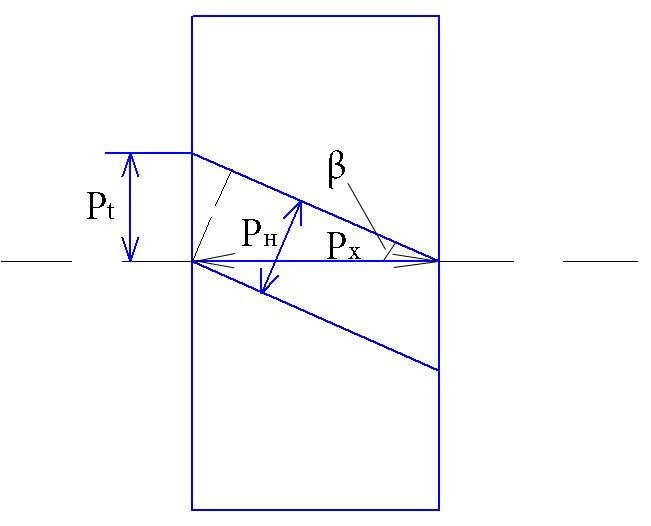
В торцевом сечении геометрия зацепления косозубых колес аналогична геометрии зацепления прямозубых
Коэффициент перекрытия косозубых передач больше чем у прямозубых
![]()
КПД косозубых передач примерно такой же как и у прямозубых. Изготавливаются теми же инструментами, но с поворотом заготовки на угол .
Недостаток - дополнительная осевая сила, возникающая при работе. Можно ликвидировать - сделать шевронный зуб, однако это сложно.
Конические зубчатые передачи
Применяются
для передачи вращения между валами оси
которых пересекаются под некоторым
углом
![]() ,
как правило
,
как правило![]()
Для пары конических колес передаточное число обычно назначают для понижающих передач 1 ≤ u ≤ 6,3 для повышающих передач 1 ≤ u ≤ 3,2. КПД передачи обычно 0,98-0,96
При высоких угловых скоростях вместо прямозубых конических колес используют более сложные в изготовлении конических колеса с косыми, дуговыми или спиральными зубьями, которые работают более плавно за счет увеличенного коэффициента перекрытия.
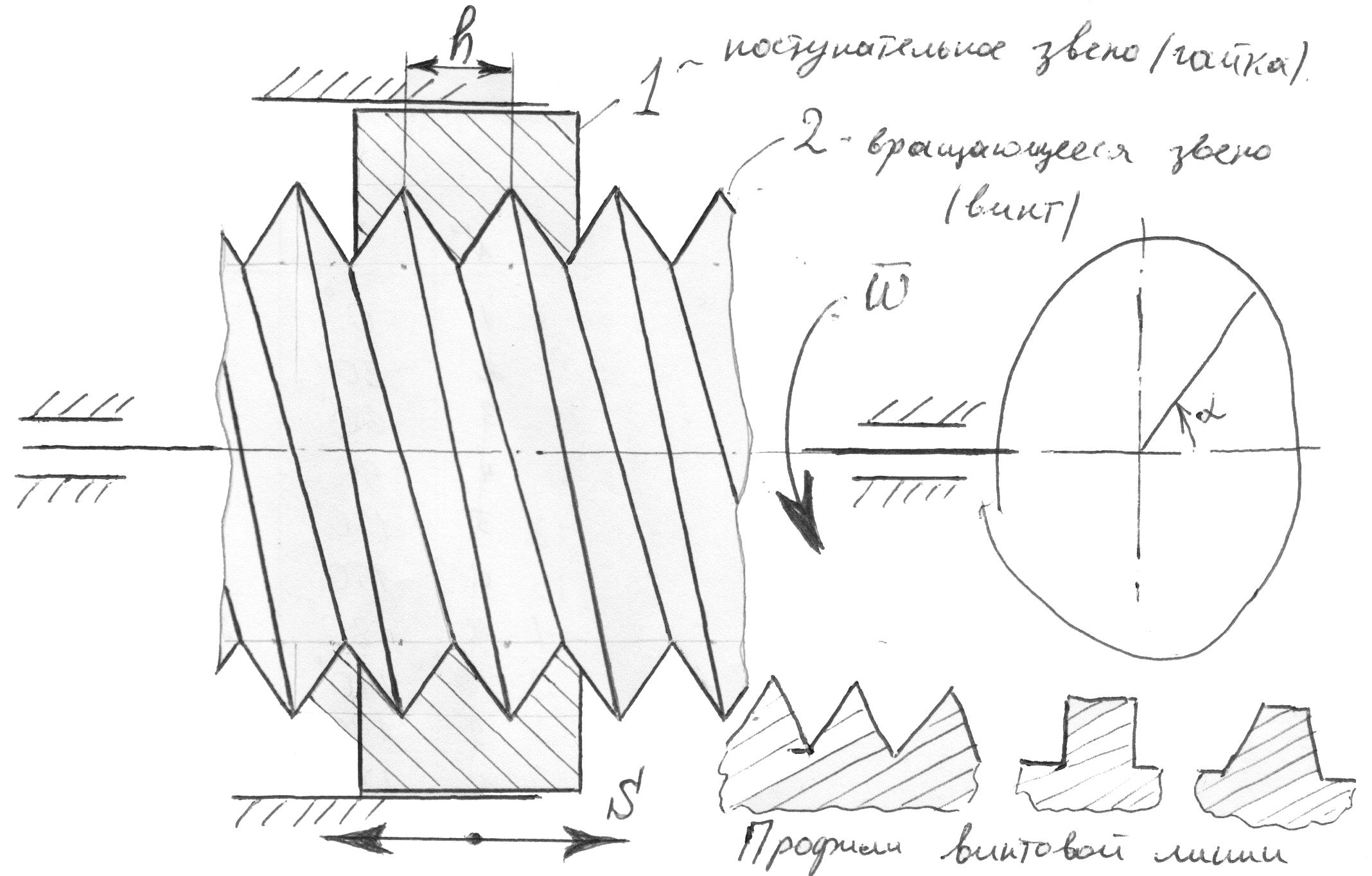
Тема №7 Винтовые механизмы
Предназначены для преобразования вращательного движения в поступательное, причем поступательное движение может выполняться с очень высокой точностью. Звено, выполняющее поступательное движение, движется, как правило, с небольшой скоростью. Используются в механизмах, где необходимо обеспечить достаточно высокую точность позиционирования звена движущегося поступательно.
Подвижность
винтового механизма определяется:
![]()
![]() ;
;![]() ;
;![]()
Перемещение
поступательного звена, если
![]() (шаг винта), определяется
(шаг винта), определяется![]()
Где
![]() – угол поворота винта,
– угол поворота винта,![]() – число полных оборотов винта.
– число полных оборотов винта.
Учитывая,
что
![]() перемещение
перемещение![]() определяется
определяется![]()
Скорость
перемещения поступательного звена
легко определяется.
![]()

Усилие, передаваемое винтовой передачей, может достигать значительных усилий, но велики потери на трение в паре. Поступательное движение может выполнять как гайка так и винт (см. рис).
Пара “гайка-винт” образуют кинематическую пару 4 класса имеющую две степени свободы одна из которых поступательное движение звеньев друг относительно друга. Поэтому для уменьшения трения и “заедания” в месте контакта необходим подбор материалов винта и гайки. Как правило используются пары “сталь-сталь”, “сталь-бронза” , “сталь-латунь” и т.п.
Профиль винтовой линии выполняется, как правило, треугольным или прямоугольным, в зависимости от назначения механизма.
Для значительного уменьшения трения в винтовой паре используется шарико-винтовой механизм
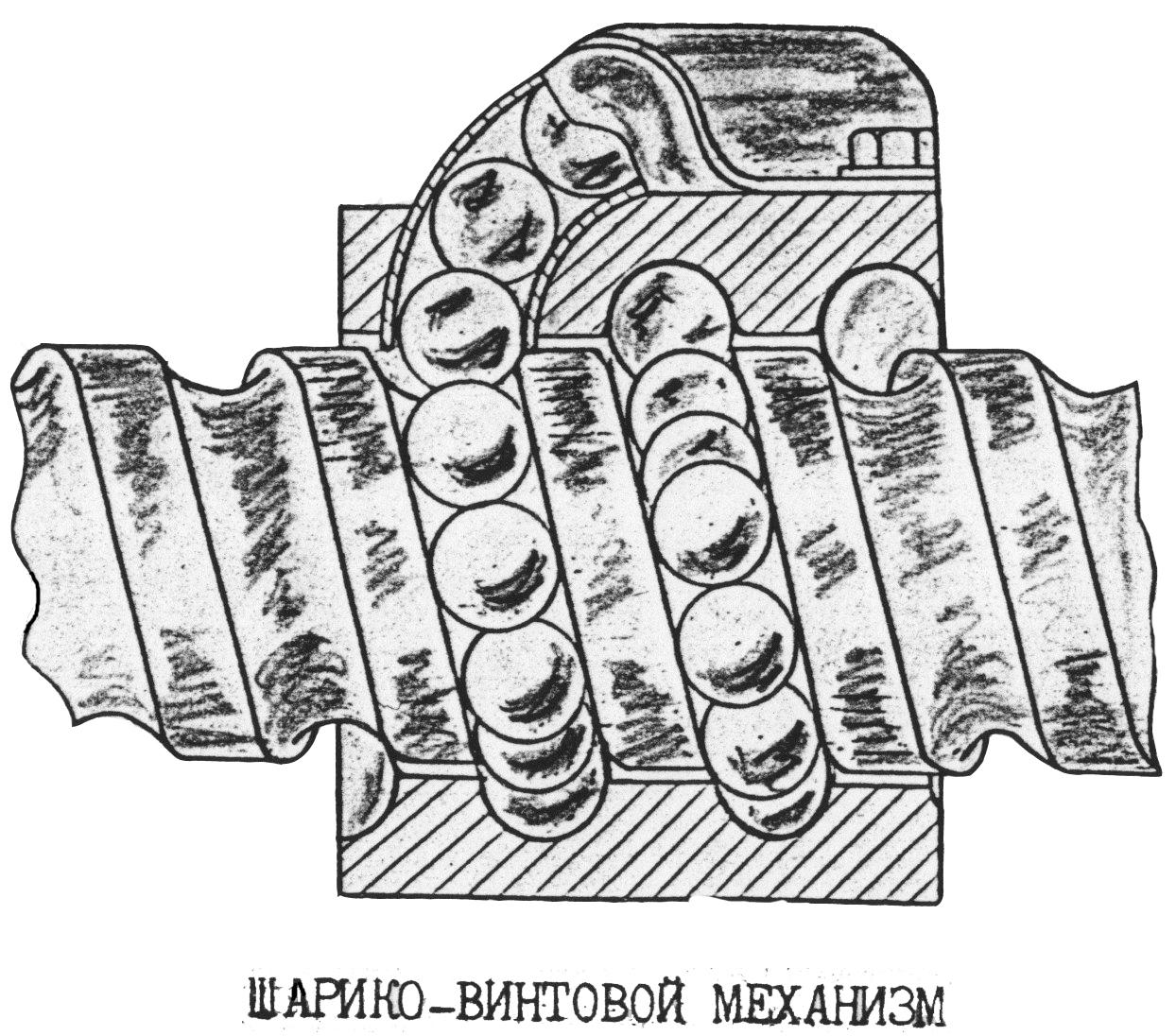
В
данном случае трение скольжения
![]() заменяется трением качения
заменяется трением качения![]() .
.
В качестве тел качения используют стальные шарики высокой твердости и различного диаметра. Как правило используются стандартные шарики, применяемые в шарикоподшипниках. Смазка пары выполняется консистентной или жидкой смазкой, в зависимости от условий работы механизма.
Недостатком
винтовых механизмов является то, что
они преобразуют вращательное движение
в поступательное. Обратное преобразование
– поступательное во вращательное,
возможно только в случае очень большой
величины шага
![]() винтовой линии, но в этом случае потери
будут велики, что приведет к значительному
уменьшению к.п.д.
винтовой линии, но в этом случае потери
будут велики, что приведет к значительному
уменьшению к.п.д.
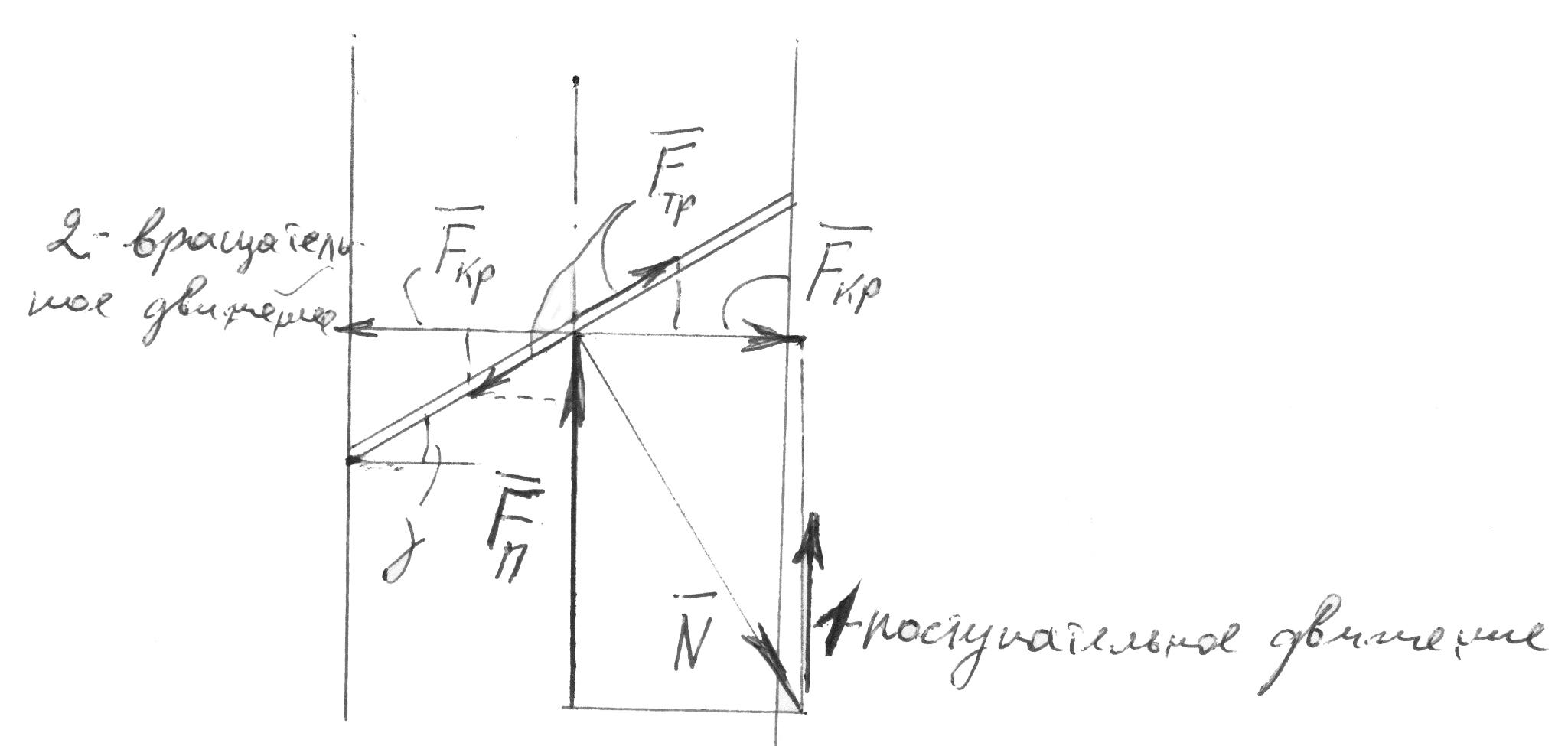
![]() -
полезная (движущая сила):
-
полезная (движущая сила):
![]() -
реакция. С ростом угла
-
реакция. С ростом угла
![]() ,
,![]() увеличивается, следовательно
увеличивается, следовательно![]() тоже возрастает следовательно уменьшается
действие силы
тоже возрастает следовательно уменьшается
действие силы![]() ,
при уменьшении угла
,
при уменьшении угла![]() уменьшается значение
уменьшается значение![]() – определяющей крутящий момент на звене
2 и ее значение, при определенном значении
– определяющей крутящий момент на звене
2 и ее значение, при определенном значении![]() будет равно
будет равно![]() –
вращение станет невозможным.
–
вращение станет невозможным.
Шариковинтовая
передача более сложна в изготовлении
т.к. необходимо обеспечить высокую
точность изготовления винтовых профильных
канавок на винте и гайке. Кроме того
разноразмерность шариков по диаметру
не должна превышать
![]() мкм.
мкм.
Винтовые механизмы скольжения менее надежны и имеют повышенную интенсивность изнашивания.
К.П.Д. винтовых механизмов зависит от скорости относительного перемещения едущего и ведомого звена, а также условий смазки контактных поверхностей:
![]() ,
где
,
где
![]() ;
;![]()
Тема №8 Детали машин и механизмов.
Валы и оси, основные определения и классификация валов и осей.
Валом называется деталь, предназначенная для поддержания вращающихся частей машины, непосредственно участвующих в передаче вращательного движения и передающая крутящий момент.
Ось является деталью, предназначенной только для поддержания вращающихся частей, и в передаче энергии непосредственно не участвует.
В конструктивном отношении особой разницы между осью и валом почти нет, однако по характеру работы они существенно отличаются друг от друга. Главное отличие оси от вала состоит в том, что ось при работе испытывает только деформацию изгиба, вал же кроме деформации изгиба обязательно подвергается и деформации кручения. Кроме того вал является всегда подвижной деталью, а ось может быть как подвижной так и не подвижной. Если ось неподвижна, то в этом случае ее опорные части не обязательно должны иметь форму тела вращения.
Валы отличаются большим разнообразием конструктивных форм, зависящих от назначения, условий работы и т.п., поэтому их классифицируют по следующим основным признакам:
По назначению: передаточные, несущие детали передач; специальные, несущие рабочие органы машины;
По форме геометрической оси: прямые; коленчатые; с изменяемой формой оси (гибкие);
По профилю поперечного сечения: круглые цилиндрические, шлицевые; фасонно-профильные; граненые;
По наличию осевого отверстия: полые с отверстием по части длины; сплошные без отверстия;
По изменению сечения вдоль геометрической оси: постоянного сечения, ступенчатые с цилиндрическими и коническими участками;
По числу опор: консольные (полуоси) ; двухопорные, многоопорные.
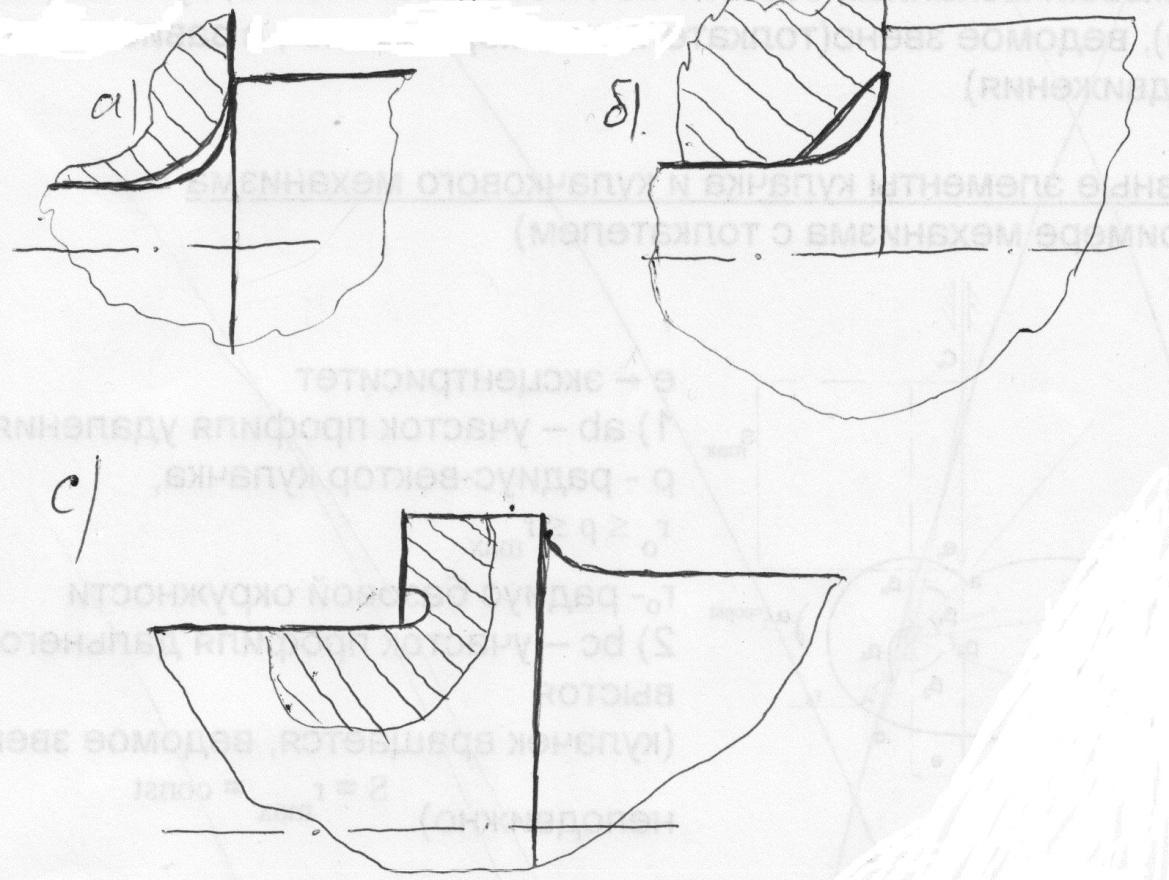
Основные элементы конструкции валов и осей – цапфы, посадочные поверхности и переходные участки.
Цапфы – участки осей и валов, которыми они соприкасаются с опорами. Цапфы на конце валов или осей получили название шипов, а в середине их шеек.
Шипы и шейки передают опорам только радиальную нагрузку.
Цапфа, предназначенная для передачи осевой нагрузки, независимо от ее расположения называется пятой.
Опоры, на которых лежат шипы и шейки, называются подшипниками, а опоры пят – подпятниками.
Диаметры посадочных поверхностей валов и осей выбираются по ГОСТу, а диаметры под подшипники качения – по стандартным размерам внутренних колец подшипников.
Валы и оси являются ответственными деталями механизмов и машин. В случае их поломки, как правило, разрушаются и другие детали, что приводит к выходу из строя всей машины. Поэтому к валам и осям предъявляются определенные требования, а именно: достаточные прочность и жесткость, износостойкость трущихся поверхностей, технологичность конструкции, удобство изготовления и сборки. Эти требования могут быть обеспечении при условии правильного расчета и конструирования валов и осей, а также обоснованного выбора материала, технологии изготовления и упрочнения их изнашиваемых частей.
Материалы валов и осей должны быть прочными, хорошо обрабатываться и иметь высокий модуль упругости.
Чаще всего для их изготовления применяются углеродистые и легированные стали в виде проката или поковок , значительно реже – стальное литье.
Из углеродистых сталей используют ст 30,40,45,50, менее ответственные валы изготавливают из ст 4 и ст 5
Быстроходные валы и оси ответственного назначения изготавливают из легированных сталей 20Х, 12ХНМА и т.п.
Для упрочнения поверхности валов и осей используют закалку (в том числе т.в.ч.) или цементацию, иногда азотирование.
Основными критериями работоспособности валов и осей являются усталостная прочность и жесткость.
Усталостная прочность оценивается коэффициентом запаса прочности, а жесткость - допускаемым прогибом в местах посадки деталей, а также допускаемыми углами наклона и закручивания сечений.
Практика показывает, что разрушение валов и вращающихся осей в большинстве случаев носит усталостный характер, поэтому основным является расчет валов и осей на усталостную прочность.
Конструкция валов и осей должна быть такой, чтобы отсутствовали концентраторы напряжения.
Расчет и конструирование валов производят в следующей последовательности:
Выбирают материал вала;
Определяют размеры диаметрального сечения вала на различных участках на основе приближенных расчетов;
Производят конструирование вала и опорных узлов, в результате чего в первом приближении определяются форма вала, его габаритные размеры , и главное фактическое расстояние между опорами и точками приложения сил.
Составляют расчетную схему и проводят проверочный расчет с целью уточнения размеров, полученных при предварительных расчетах вала.
Приближенный расчет диаметральных сечений вала производят из условия чтобы напряжение кручения
![]() ,
,
Где
![]() – крутящий момент действующий в сечении
вала;
– крутящий момент действующий в сечении
вала;![]() - полярный момент сечения, который можно
принимать равным
- полярный момент сечения, который можно
принимать равным![]() ;
;![]() - допускаемое напряжение кручения,
- допускаемое напряжение кручения,![]()
Исходя из этого можно определить предварительный диаметр сечения
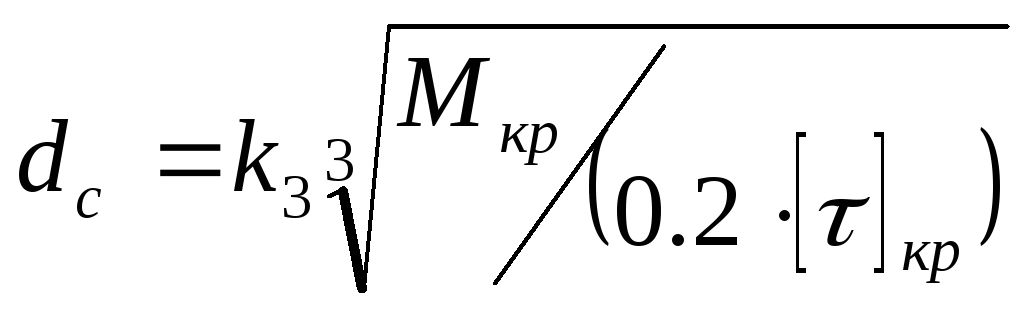
Где
![]() – коэффициент запаса
– коэффициент запаса![]()
Далее диаметр округляют по ГОСТ до стандартной величины.
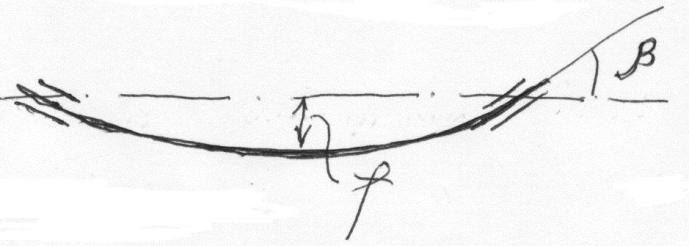
Проверочные
расчеты проводят : 1) на усталостную
прочность в наиболее опасных сечениях.
2) на статическую прочность при действии
пиковых нагрузок в наиболее опасных
сечениях вала. Кроме этого производят
расчет вала на жесткость. Изгибная
жесткость
оценивается прогибом
![]() и углом наклона
и углом наклона![]() .
.
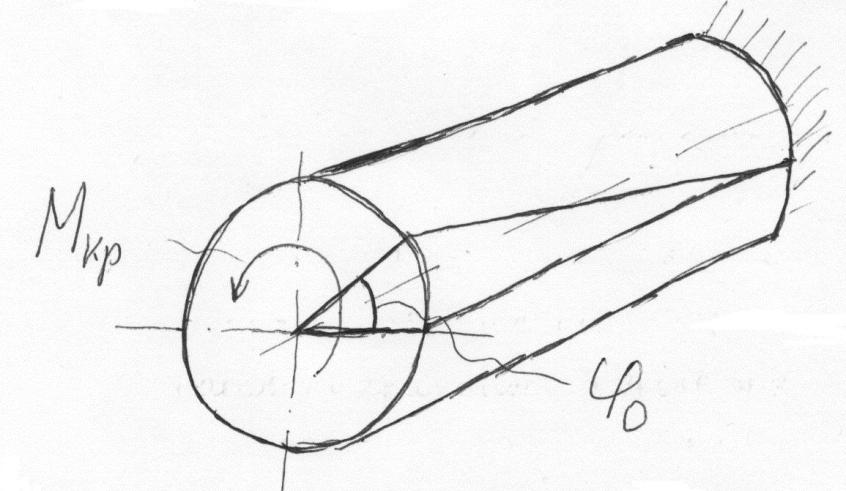
Крутильная
жесткость
оценивается углом закручивания
![]() на единицу длины вала.
на единицу длины вала.
При необходимости производят расчет валов с учетом колебаний. Все проверочные расчеты производятся с помощью специальных методик.
В отличие от валов, оси подвергаются только изгибу. Поэтому проектный расчет осей на статическую прочность выполняют аналогично расчету балок с шарнирными опорами методами сопротивления материалов.
Опоры скольжения
предназначены для передачи нагрузок от осей и валов на корпус машины. Опоры воспринимающие радиальную нагрузку называют подшипниками, а опоры нагружаемые осевыми силами – подпятниками. Существует большое многообразие конструкций подшипников скольжения.
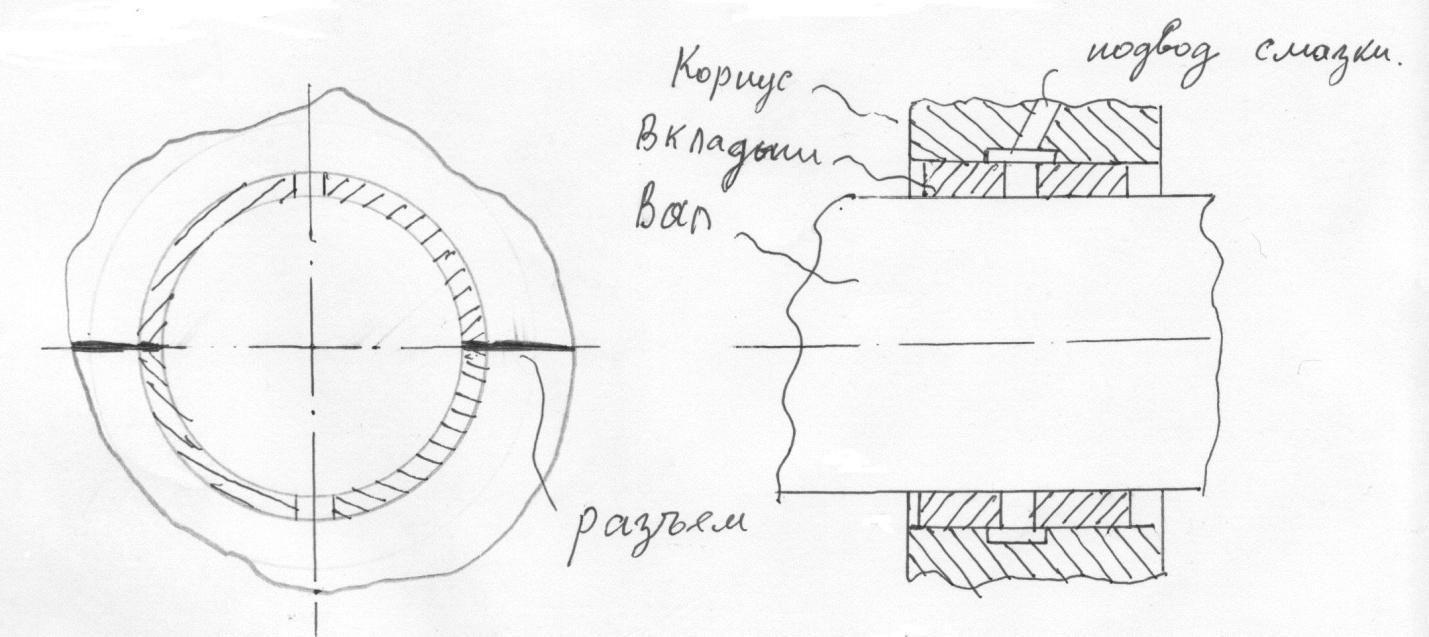
Для
устранения заеданий, которые возможны
при перекосе (прогибе) вала или оси
обычно назначают
![]() или устанавливают самоустанавливающийся
вкладыш.
или устанавливают самоустанавливающийся
вкладыш.
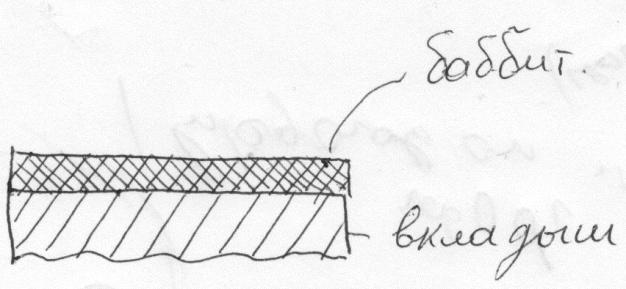
Вкладыши подшипников скольжения изготавливают из материалов обладающих достаточной прочностью, антифрикционными свойствами, высокой износостойкостью и хорошей прирабатываемостью к цапфе вала. К ним относятся сплавы: бронза, баббит, латунь, сплавы на алюминиевой основе (алькусипы), антифрикционный чугун и некоторые неметаллические материалы. Оловянистые бронзы дорогие, поэтому используются в ответственных подшипниках, воспринимающих значительные нагрузки, в том числе ударные и переменные. Менее дефицитными являются свинцовые и алюминиевые бронзы, а так же баббиты (содержат до 83% олова) Баббиты заливают тонким слоем во вкладыш из чугуна или стали.
К
неметаллическим антифрикционным
материалам относятся: прессованная
древесина, древесно-слоистые пластики,
текстолит, капрон, резина, металлокерамика.
Данные материалы хорошо работают в воде
и в масле, но при высоких температурах
(от
![]() С до
С до![]() С) теряют свои антифрикционные свойства.
С) теряют свои антифрикционные свойства.
В
опорах скольжения в зависимости от
условий взаимодействия трущихся
элементов трение может быть: сухим,
граничным, полужидкостным и жидкостным.
Сухое трение – трение без смазки.
Граничное отличается от сухого наличием
в отдельных точках контакта смазочных
пленок (толщина
![]() мкм
). Жидкостное трение – есть зазор.
мкм
). Жидкостное трение – есть зазор.
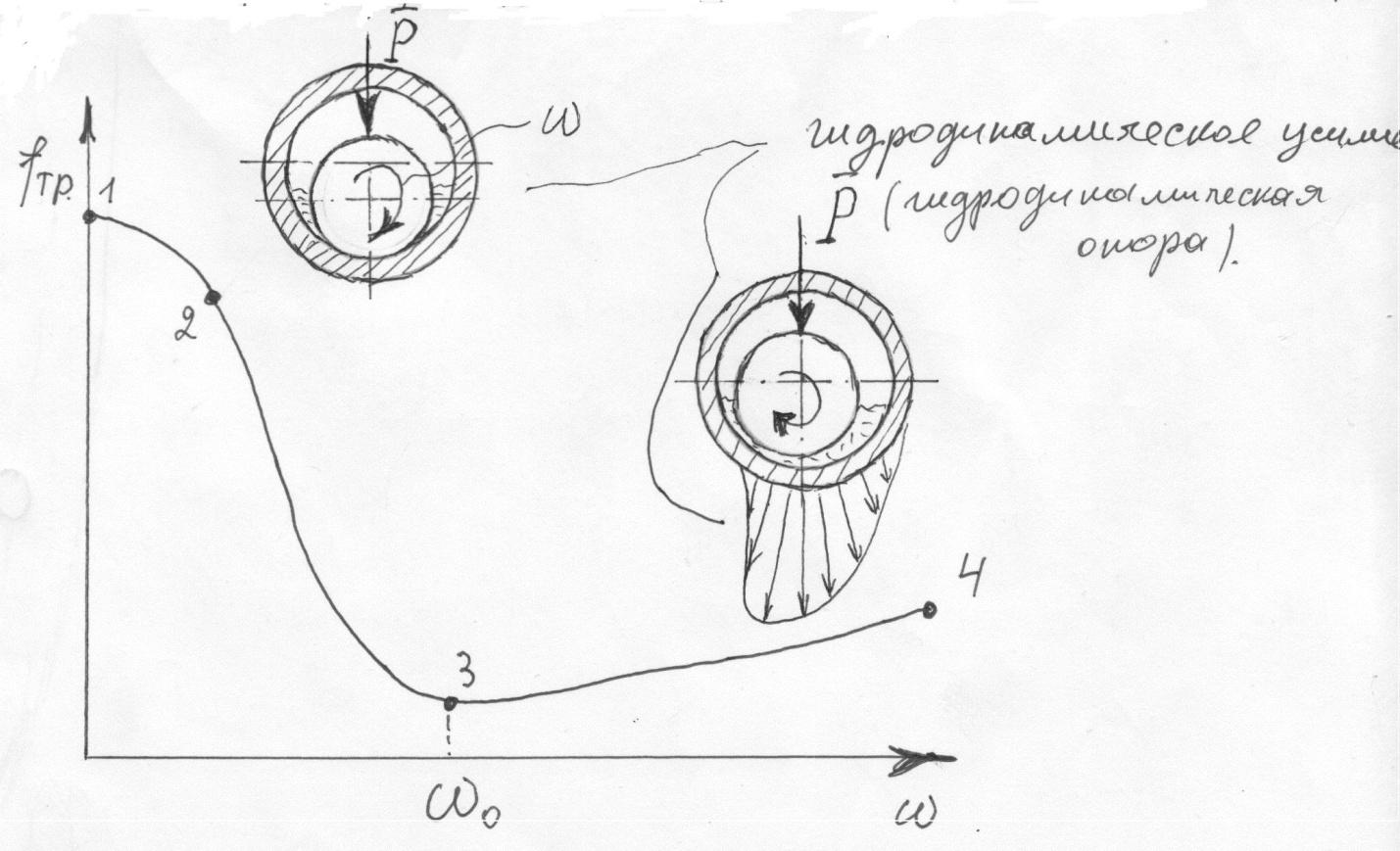
1-2 – сухое и граничное трение, 2-3 – полужидкостное трение, 3-4 – жидкостное трение.
Наряду с гидродинамическими опорами существуют и гидростатические опоры.
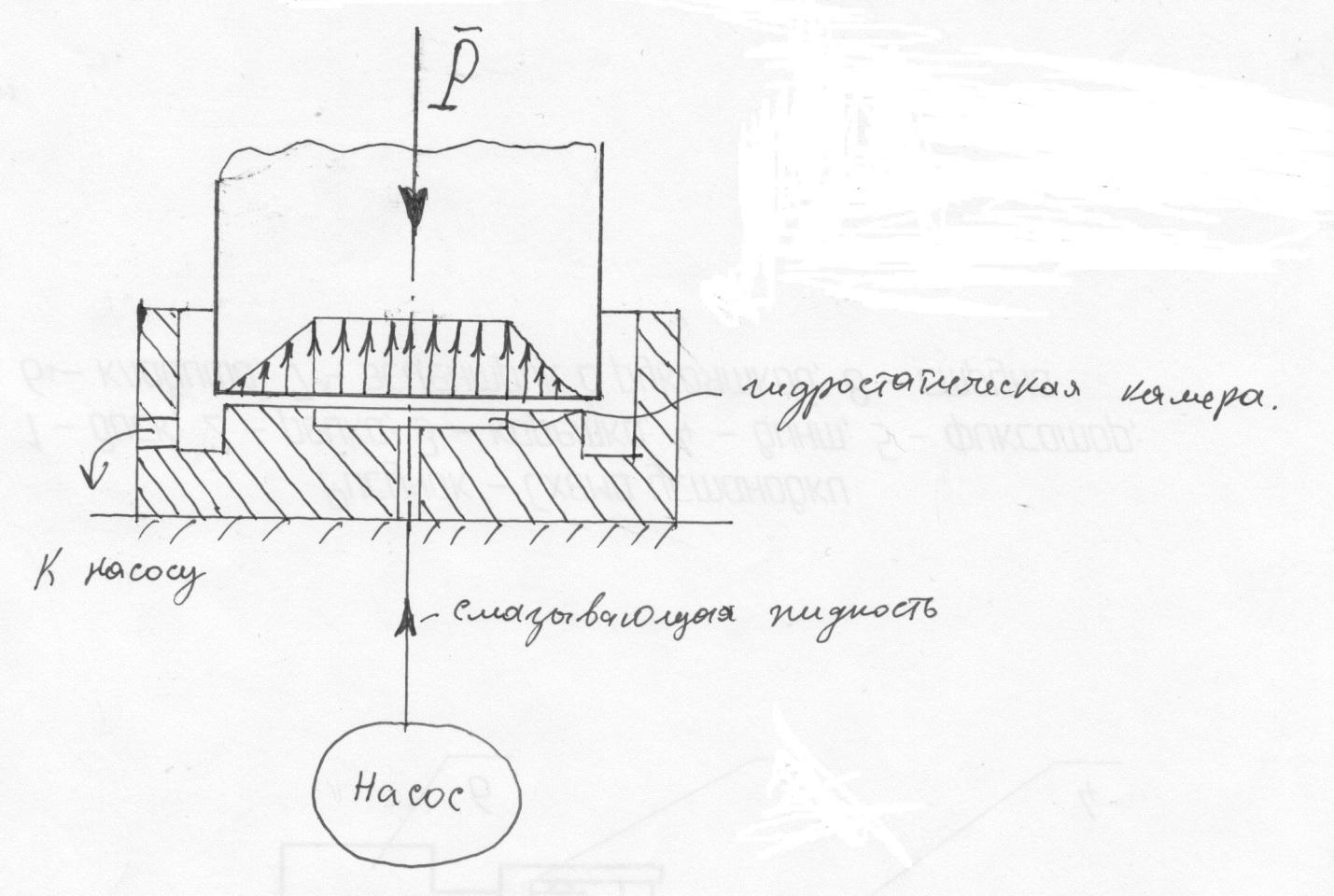
![]() ,
где
,
где
![]() - давление в гидростатической камере,
- давление в гидростатической камере,![]() - площадь камеры.
- площадь камеры.
Расчет гидродинамических подшипников (аналитический) достаточно сложен т.к. невозможно учесть многие факторы определяющие их работоспособность. Гидростатический подшипник более прост в расчете, но необходимо иметь устройство обеспечивающее подачу смазывающей жидкости.
Подшипники качения
Подшипники качения – часть опоры вала (или вращающейся оси), воспринимающая от него радиальные, осевые и радиально-осевые нагрузки, работающая в условиях трения качения. Подшипники качения имеют ряд преимуществ перед подшипниками скольжения. К основным их достоинствам, по сравнению с подшипниками скольжения относятся меньшие затраты энергии на процесс трения (момент трения в шарикоподшипниках примерно в 3-6 раз меньше, чем в подшипниках скольжения). Кроме этого они имеют меньшие габаритные размеры по ширине, меньший расход смазочных материалов.
Недостатками подшипников качения являются: ограниченные возможности работы при больших нагрузках и частотах вращения, большие габаритные размеры по диаметру, а также невозможность разъема. К недостаткам можно отнести сравнительно высокую стоимость и возможность изготовления только на специализированном оборудовании. Подшипники качения стандартизованы.
Конструктивно подшипник качения (см рис 1.а) представляет сборочную единицу, основными деталями которой являются тела качения – шарики или ролики различной формы 3, установленные между кольцами 1,2 и сепаратор 4, разделяющий тела качения.
 рис.
1.а
рис.
1.а
Внутреннее кольцо насаживается на вал, наружное устанавливается в корпусе опорного узла машины.
Отдельные конструкции подшипников качения имеют более сложное устройство и включают другие детали, например закрепительные втулки, защитные шайбы, войлочные уплотнения и др.
Подшипники качения классифицируются по следующим основным признакам: 1) по направлению воспринимаемой нагрузки – радиальные, радиально-упорные и упорные; 2) по форме тел качения – шариковые и роликовые, причем последние могут быть с различными видами роликов (см. рис. 1.б); 3) по числу рядов тел качения – однорядные и многорядные; 4) по способности самоустанавливаться – самоустанавливающиеся (сферические) и несамоустанавливающиеся. По габаритным размерам подшипники делятся на пять серий: свехлегкая, особо легкая, средняя и тяжелая, в зависимости от ширины делятся на особо узкие, узкие, нормальные, широкие и особо широкие.
На рис. 2 представлены основные типы подшипников качения.
 рис.2
рис.2
Схемное (упрощенное) изображение подшипников качения.
|
Без указания типа подшипника |
С указанием типа подшипника (а,в,ж,и) |
|
| |
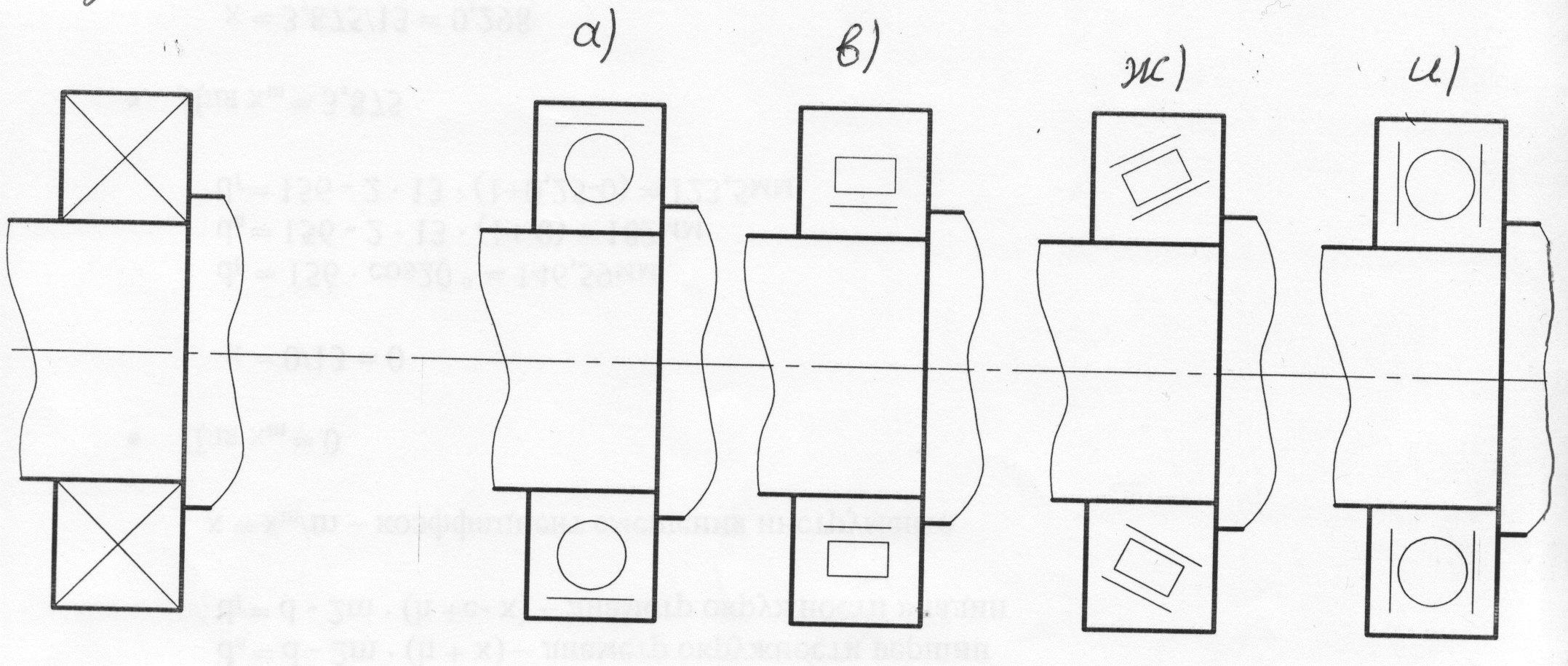
Радиальные шариковые и роликовые (рис. 2. а,в) подшипники воспринимают главным образом радиальные нагрузки. Однорядные радиальные шарикоподшипники (рис. 2. а) дают возможность передавать и осевую нагрузку в пределах 60% от неиспользованной радиальной. Радиальные двухрядные сферические подшипники (рис. 2.б) используются при недостаточно жестких двухопорных валах, а также при невозможности обеспечить строгую соосность опор. Они передают осевую нагрузку до 20% от неиспользованной радиальной.
Грузоподъемность
роликоподшипников при тех же габаритных
размерах значительно выше, чем
шарикоподшипников (контакт по линии).
Однако потери на трение больше: для
шарикоподшипников
![]() , для роликоподшипников
, для роликоподшипников![]() .
Роликовые подшипники чувствительны к
перекосу валов более, чем шариковые.
Роликовые подшипники с двумя бортами
на одном из колец и одним бортом на
другом (рис. 2.в) дают возможность
передавать односторонние осевые
нагрузки. Подшипники с витыми роликами
хорошо противостоят радиальным нагрузкам.
Они не фиксируют вал в осевом направлении,
менее чувствительным к перекосам, чем
подшипники с длинными цилиндрическими
роликами.
.
Роликовые подшипники чувствительны к
перекосу валов более, чем шариковые.
Роликовые подшипники с двумя бортами
на одном из колец и одним бортом на
другом (рис. 2.в) дают возможность
передавать односторонние осевые
нагрузки. Подшипники с витыми роликами
хорошо противостоят радиальным нагрузкам.
Они не фиксируют вал в осевом направлении,
менее чувствительным к перекосам, чем
подшипники с длинными цилиндрическими
роликами.
Игольчатые подшипники (рис. 2.д) предназначаются для восприятия больших радиальных нагрузок в опорах, размеры которых ограничены в радиальном направлении. Иголки имеют размеры: в диаметре не более 5 мм и длина от 4 до 12 диаметров. Как правило сепаратор не используется. Работают игольчатые подшипники как при малых, так и при больших частотах вращения.
Радиально-упорные шарико- и роликоподшипники предназначены для восприятия одновременно действующих радиальных и осевых нагрузок одного направления.
Конические роликовые радиально-упорные подшипники (рис. 2.ж) служат для восприятия значительных радиальных и осевых нагрузок одного направления. Эти подшипники несамоустанавливающиеся и чувствительны к перекосу осей вала и расточек корпуса. Поэтому применяют двухрядные конические роликовые подшипники (рис. 2.з)
Упорные шарико- и роликоподшипники предназначаются для восприятия осевых нагрузок. При больших частотах вращения работают неудовлетворительно.
Подшипники качения маркируются нанесением на торцы колес цифр и букв, условно обозначающих внутренний диаметр, серию, тми, конструктивные особенности и другие признаки.
Нагрузка на тела качения распределяется неравномерно (см. рис.3).
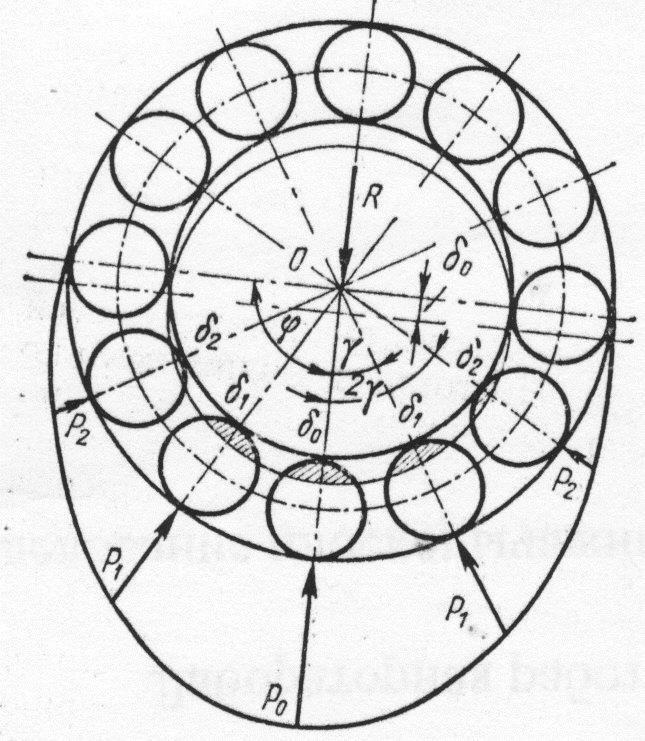 рис.3
рис.3
Поэтому основными причинами потери работоспособности подшипников является усталостное выкрашивание поверхностей тел качения и беговых дорожек, абразивный износ при попадании пыли и абразивных частиц, пластические деформации из-за действия ударных нагрузок. Кроме этого наблюдается разрушение сепаратора от действия центробежных сил и тел качения.
Выбор подшипников производится по каталогам и состоит из подбора типа подшипника и определения его наиболее рациональных размеров. Подшипники качения рассчитываются на долговечность (ресурс) по динамической и статической грузоподъемности. Методы расчета стандартизированы и соответствуют рекомендациям ИСО.
Смазка
подшипников качения
является необходимым условием правильной
и надежной работы опор валов и осей.
Основное назначение смазки: уменьшение
трения, отвод тепла, уменьшение шума
при работе подшипника. Кроме того смазка
защищает от коррозии. Используются
консистентные и жидкие смазки.
Консистентные смазки используют при
окружных скоростях до
![]() . Существуют различные системы смазки.
. Существуют различные системы смазки.
Уплотнительные устройства (рис. 4)

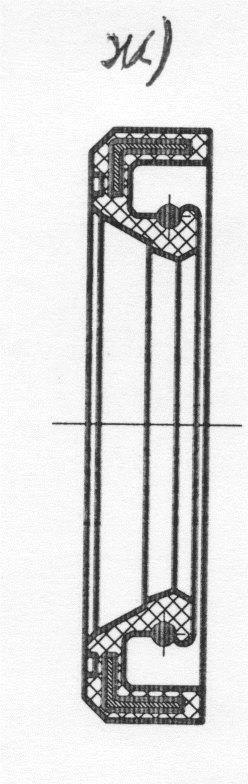 рис.4
рис.4
Служат
для предохранения подшипников от
попадания в них пыли, грязи, а также для
того, чтобы предотвратить вытекание из
них масла. Уплотнения делятся на : 1)
контактные; 2) щелевые ; 3) лабиринтные ;
4) защитные мазеудерживающие кольца и
маслоотражательные шайбы. Наибольшее
распространение получили контактные
уплотнения из войлочных (рис. 3.а), фетровых
(рис. 3.б) и кожаных (рис. 3 в,г) колец. Они
наиболее просты и дешевы, хорошо
предохраняют от грязи и вытекания масла
при скоростях
![]() , рекомендуются для машин работающих в
обычных незагрязненных помещениях.
, рекомендуются для машин работающих в
обычных незагрязненных помещениях.
Щелевые и лабиринтные уплотнения (рис. 3.д,е) применяются в быстроходных узлах и являются одним из наиболее совершенных и надежных типов уплотнений. Работа их не ограничена окружной скоростью, температурой узла, видом его смазки. Малый зазор сложной извилистой формы, между вращающейся и неподвижной частями узла, заполненный консистентной смазкой, предохраняет подшипники от грязи и препятствует вытеканию масла.
Кроме
этого используются стандартные (рис
.4.ж) уплотнительные манжеты
(резинометаллические), позволяющие
обеспечить надежное уплотнение валов
вращающихся со скоростями до
![]() , при избыточном давлении в корпусе
механизма до 0,1 МПа .
, при избыточном давлении в корпусе
механизма до 0,1 МПа .
Тема №6 Динамика (механизмов и машин)
Динамика механизмов и машин ( машинных агрегатов) – это раздел курса, изучающий движение машинного агрегата при учете сил, действующих на его звенья. Проблему можно разбить на следующие взаимосвязанные задачи:
1.Исследование движения МА под действием заданных сил и моментов
2.Исследование неравномерности движения машинного агрегата.
3.Основа теории автоматического регулирования машин
4.Силовой анализ механизмов
5.Уравновешивание движущихся масс.
Прежде чем решать эти задачи, рассмотрим некоторые понятия, используемые в динамике МА.
Основные режимы движения машинного агрегата. Цикл.
При анализе зависимости между угловой скоростью ведущего звена и углом его поворота на всем интервале работа машины, для большинства машин характерны следующие особенности.
|
|
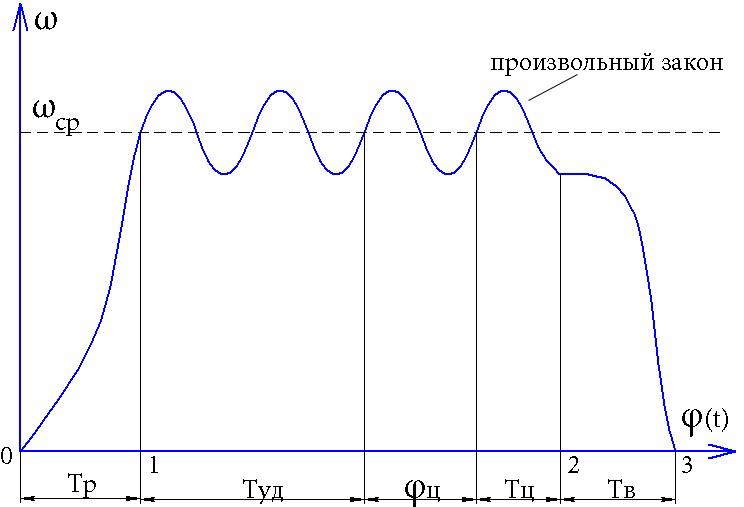
Вначале происходит разгон машины Tp, где ω → от 0 до ωср. На данном режиме работы движущих сил больше, работы совершаемой силами сопротивления (Ag>Ac). Далее, как правило, решим установившегося движения Tуд.
ω периодически изменяется колеблясь около. Наименьший интервал времени на котором происходит изменение ω называется периодом или циклом.
Обычно
φцикла
=
![]() )
Туд
= n*Тцикла
, ,
где n-число
циклов, а
)
Туд
= n*Тцикла
, ,
где n-число
циклов, а
Тц – время одного цикла.
Работа движущих сил за цикл в этом режиме равна работе сил сопротивления (Ag = Ac)
Последний режим работы – выбег. То есть на данном режиме угловая скорость ведущего звена уменьшается от ωср до 0, а Ас > Ag
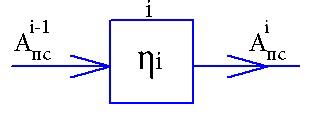
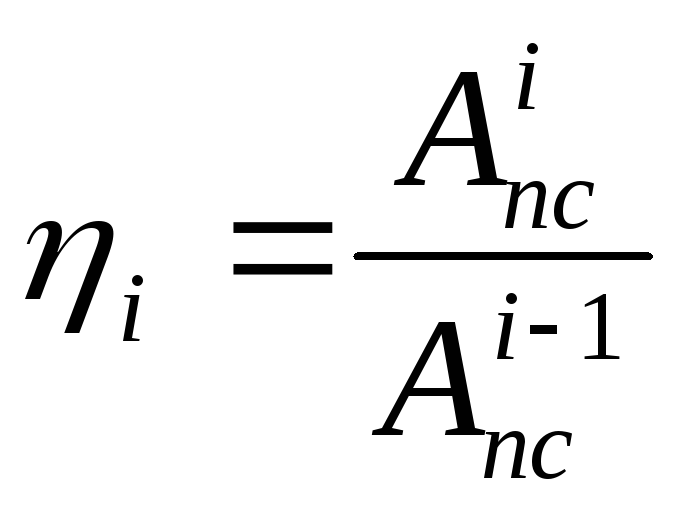
Понятие о КПД машинного агрегата
Для характеристики установившегося режима вводится важное понятие. Чтобы определить его рассмотрим более подробно работу Ас, которую совершают силы сопротивления. Очевидно что Ас состоит из работы которую совершают силы полезного сопротивления Апс (для преодоления которых и создана машина), а также работы , которую совершают силы трения в кинематических парах и сила сопротивления среды Ат .
Ас = Апс + Ат . Из вышесказанного следует (см. понятие цикла работы)
Ag = Aпс + Ат (1)
Или
1 = η + ξ (2)
Где
![]() - механический КПД машинного агрегата
- механический КПД машинного агрегата
![]() -
механический коэффициент потерь МА
-
механический коэффициент потерь МА
Из (2) следует, что 0 ≤ η < 1 , 0 < ξ ≤ 1 , где знак = относится к режиму холостого хода (т.е. нет полезной нагрузки)
КПД – важная характеристика машины, так как в среднем показывает насколько она экономична, энергетически целесообразна. Поскольку точное определение η зависит от точности определяемых сил трения или сопротивления среды (а это достаточно сложно), его величина находится, как правило экспериментально.
Только для некоторых простых механизмов можно теоретически определить КПД
Если МА можно представить в виде совокупности простых механизмов (или механизмов с известным КПД), соединенных последовательно, параллельно или смешанным образом, возможна теоретическая оценка его общего КПД
А) Последовательное соединение
|
|
|
|

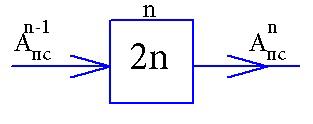
Из определения следует:
![]() ,
,
![]() ,
,
Где
![]() - КПД всей машины;
- КПД всей машины;![]() 1
– КПД первого механизма;
1
– КПД первого механизма;
![]() i
– КПД i-го
механизма;
i
– КПД i-го
механизма;
С другой стороны, очевидно, что
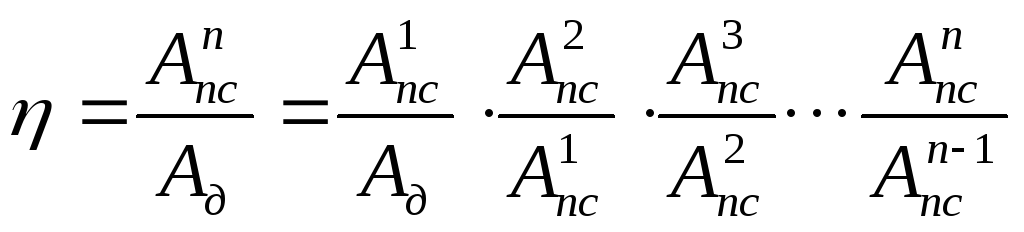
Окончательно
![]() (3)
(3)
Б) Параллельное соединение
|
|

 (4)
(4)
В зависимости от того какую работу легче определить на практике (4) можно представить
 или
или
 (5)
(5)
Если схема машинного агрегата представляет собой цепь последовательных и параллельных соединений то пользуются зависимостями (3) и (5)
На практике работу определить значительно сложнее, и лучше оперировать понятием «мощность механизма» N (работа в единицу времени)
Тогда имеем зависимость для КПД аналогичные (3) и (5) только вместо А имеем N
Исследование движения машинных агрегатов под действием сил и моментов
Постановка задачи:
Любой машинный агрегат можно представить в виде блок-схемы
|
|

Задача исследования движения МА является задачей отыскания действительного закона движения звеньев МА, который бы учитывал не только действие на него внешних сил и моментов, но также и взаимное влияние механизмов входящих в машинный агрегат.
Существует 2 пути решения задачи:
1.Разбиение всего МА на отдельные звенья, составление уравнений движения этих звеньев (в форме уравнений Лагранжа 2-го рода или второго закона Ньютона) и решение полученной системы дифференциальных уравнений. Этот способ применяется для исследования для исследования динамики конкретных машин. Решение очень сложное, т.к. эта система нелинейных дифференциальных уравнений и в правой части содержатся неизвестные реакции связей, действующие в кинематических парах.
2.Второй путь основан на рассмотрении МА как некоторой дискретной механической системы, обладающей несколькими степенями свободы. Для подавляющего большинства МА ω=1 . Для них целесообразна замена МА некоторой условной механической системой с одной степенью свободы. Эта условная механическая система, с ω=1, получила название динамической модели МА (расчетная схема для решения поставленной задачи) или звена приведения.
Рассмотрим виды динамических моделей МА с одной степенью свободы.
Для плоских механизмов в расчетной практике используется 2 вида моделей. Эти модели применяются в зависимости от того какое движение совершает звено приведения: вращательное или поступательное. Условные параметры обозначенные на рисунке получили название приведенных параметров.
|
|
|
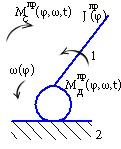
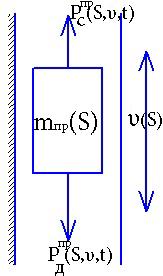
Искомые функции, характеризующие закон движения звена приведения ω, v. Наиболее удобно в качестве звена приведения выбирать звено МА, движение которого описывается одной обобщенной координатой (это, как правило входное звено). В этом случае можно сразу найти его реальный закон движения, а далее, реальные законы движения остальных звеньев
Рассмотрим как находятся приведенные параметры моделей представленных выше:
Для определения приведенных инерциальных параметров Jпр ; mпр используют равенство кинетической энергии звена приведения и кинетической энергии реальной машины:
Eпр = Eр.м. (1)
Для 1-ой модели:
![]() ,
,
![]() (2)
(2)
Где Ei – кинетическая энергия i-го звена машины. В общем случае звено совершает плоскопараллельное движение, поэтому
![]() (3)
(3)
Первое слагаемое определяет кинетическую энергию звена в поступательном и второе во вращательном движении относительно полюса, в выражении (3) за полюс выбран центр тяжести i-го звена Si , так как в этом случае просто определить момент инерции звена Jsi , а mi, vsi, ωi - соответствующая масса, скорость полюса, абсолютная угловая скорость i-го звена. Подставляя соотношения (2), (3) в (1) получим:
![]()
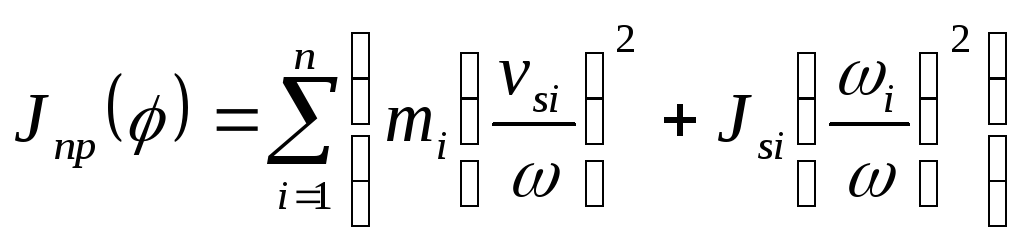 (4)
(4)
Из
(4) следует, что Jпр
является только функцией положения при
постоянных mi
и Jsi
. Аналогично для второй модели получим,
учитывая что
![]()
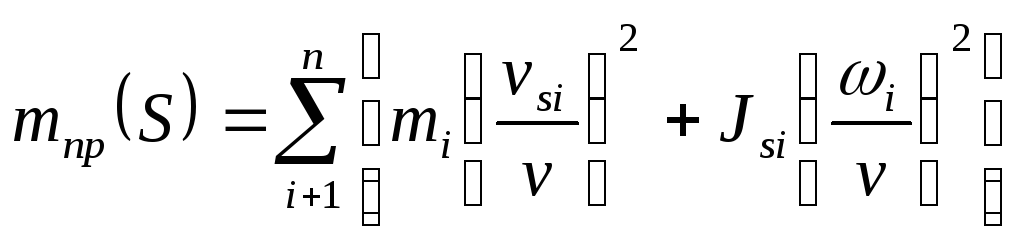 (5)
(5)
Приведенные
силовые параметры (![]() )
находятся из условия равенства
элементарных работ совершаемых
приведенными силовыми параметрами и
внешними силами и моментами, действующими
на звенья агрегаты:
)
находятся из условия равенства
элементарных работ совершаемых
приведенными силовыми параметрами и
внешними силами и моментами, действующими
на звенья агрегаты:
dАпр = dАрн (6)
Для 1-ой модели:
![]() ;
;
![]() (7)
(7)
Для машин в общем случае удобнее оперировать не с работой, а с мощностью (как отмечалось уже ранее), поэтому поделим (7) на dt и получим
![]()
![]() (8)
(8)
Мощность Ni, развиваемую силами приложенными к i-му звену, представим
![]() (9)
(9)
Где Pi – сила, действующая на i-е звено, vi – скорость точки приложения силы Pi, αi – угол между ними; Mi – момент сил, действующий на i-е звено. Подставляя (7), (8), (9) в (6) находим
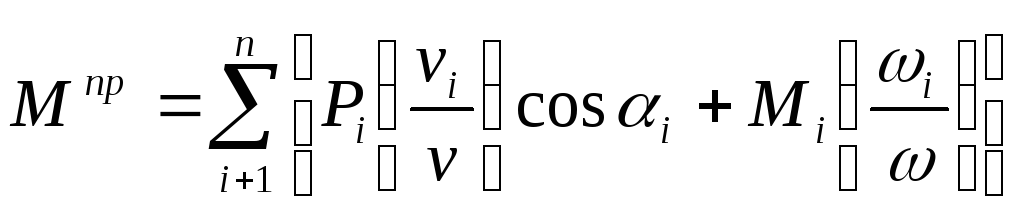
В общем случае из (10) следует, что Mпр является функцией положения (φ) и Pi и Mi , которые, в свою очередь, являются функциями t; φ; ω т.е. Мпр=f(φ,ω,t)
Аналогично получим приведенную движущую силу или силу сопротивления

В качестве примера рассмотрим простейший машинный агрегат , где за звено приведения примем кривошип 1, учитывая (4) получим:
|
|
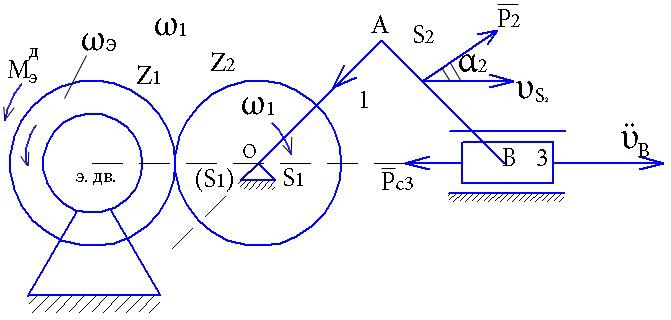
 ,
где
,
где
Jэд, Jz1, Jz2, Js1, Js2 – моменты инерции ротора эд.дв., зубчатых колес z1, z2,
Звенья 1,2 относит. Центров тяжести; m2,m3 – массы 2,3 звеньев, точка S1 совпадает с O
Учитывая (10) имеем:
(движущих
сил)
![]()
сил сопротивления
![]()
Основные формы уравнений движения и их анализ
Положим, что МА представлен в виде 1-ой динамической модели. Для вывода уравнений движения зв. Пр. можно воспользоваться уравнением Лагранжа 2 рода или теоремой об изменении кинетической энергии механической системы
Во втором случае будут более простые выкладки
![]() (11)
(11)
Где Ei, Ei+1 - кинетическая энергия системы в положении i и (i+1)
∆A - работа внешних сил на перемещение при изменении положения системы от i к (i+1). В зависимости от конкретного представления E и ∆A различают две формы уравнений движения интегральную и дифференциальную
Для интегральной формы:
![]()
 (12)
(12)
Подставляя (12) в (11) получим интегральную форму уравнения движения МА при моделировании его кривошипом
 (13)
(13)
Где интегралы означают, соответственно, работу (приведенную) движущих сил и сил сопротивления.
Для дифференциальной формы:
-
(14)

Подставляя (14) в (11) и дифференцируя его по φ получим два вида дифференциальных уравнений движения МА при моделировании его кривошипом
![]() (15)
(15)
Или
учтя, что
![]()
![]() (16)
(16)
Если мы моделируем МА второй моделью то в уравнениях (13), (15), (16) следует заменить J на m, а M на P.
Уравнение
движения в интегральной форме используют,
как правило, когда приведенная функция
Jпр,
![]() ,
,![]() в графическом виде. При этом интегрировании
уравнения также ведется один из
графических методов
в графическом виде. При этом интегрировании
уравнения также ведется один из
графических методов
Уравнение
движения в дифференциальной форме
используется при задании приведенной
функций (Jпр,
![]() ,
,![]() )
в аналитическом виде. Интегрирование
уравнения осуществляется при помощи
одного изчисленных
методов решения (интегрирования)
нелинейных дифференциальных уравнений
на ЭВМ.
)
в аналитическом виде. Интегрирование
уравнения осуществляется при помощи
одного изчисленных
методов решения (интегрирования)
нелинейных дифференциальных уравнений
на ЭВМ.
Методы решения уравнений движения МА.
В зависимости от формы задания приведенных функций (графической или аналитической) и аргументов от которых зависят эти функции, для решения дифференциальных уравнений движения используются различные методы.
Если
приведенные силовые функции
![]() или
или
![]() зависят
только от положения и заданы в графическом
виде то для решения широко используют
графический метод Виттенбауэра (метод
с использованием диаграмм энергомасс
) в различных модификациях. Такая задача
характерна при исследовании движения
различного рода гидромашин, пневмоустройств
и т.п.Если приведенные силовые функции
зависят не только от положения, но и от
угловой скорости и заданы в графическом
виде, что характерно для многих машин
с электродвигателем, то в расчетной
практике используют графоаналитический
метод Виттенбауэра в различных
модификациях.
зависят
только от положения и заданы в графическом
виде то для решения широко используют
графический метод Виттенбауэра (метод
с использованием диаграмм энергомасс
) в различных модификациях. Такая задача
характерна при исследовании движения
различного рода гидромашин, пневмоустройств
и т.п.Если приведенные силовые функции
зависят не только от положения, но и от
угловой скорости и заданы в графическом
виде, что характерно для многих машин
с электродвигателем, то в расчетной
практике используют графоаналитический
метод Виттенбауэра в различных
модификациях.
Из аналитических методов, которые пригодны при любой форме и законе задания приведенных силовых функций наиболее широкое применение имеют метод конечных разностей (предложен Барановым) и метод Рунге-Кутта в различных модификациях.
Рассмотрим некоторые из них.
Метод Виттенбауэра (диаграммы энергомасс )
Сущность его состоит в следующем:
Предположим задано уравнение движения звена приведения соверщающего вращательное движение, в интегральной форме в виде
![]()
=>
![]() (17)
(17)
Построив
график зависимости
![]() на основании (17) можно найти угловую
скорость входного звена машины ωi
в каждом i-ом
положении, т.е. закон движения ωi
= f(φi).
Такой график получил название диаграммы
энергомасс или Виттенбаэура. (аналогично
можно сделать и для звена совершающего
поступательное движение). Поскольку,
как выше отмечалось, в данном случае
на основании (17) можно найти угловую
скорость входного звена машины ωi
в каждом i-ом
положении, т.е. закон движения ωi
= f(φi).
Такой график получил название диаграммы
энергомасс или Виттенбаэура. (аналогично
можно сделать и для звена совершающего
поступательное движение). Поскольку,
как выше отмечалось, в данном случае
![]() и
и![]() –
функции только положения, то построить
диаграмму достаточно просто. Рассмотрим
как это делается на примере 1-ой модели.
–
функции только положения, то построить
диаграмму достаточно просто. Рассмотрим
как это делается на примере 1-ой модели.
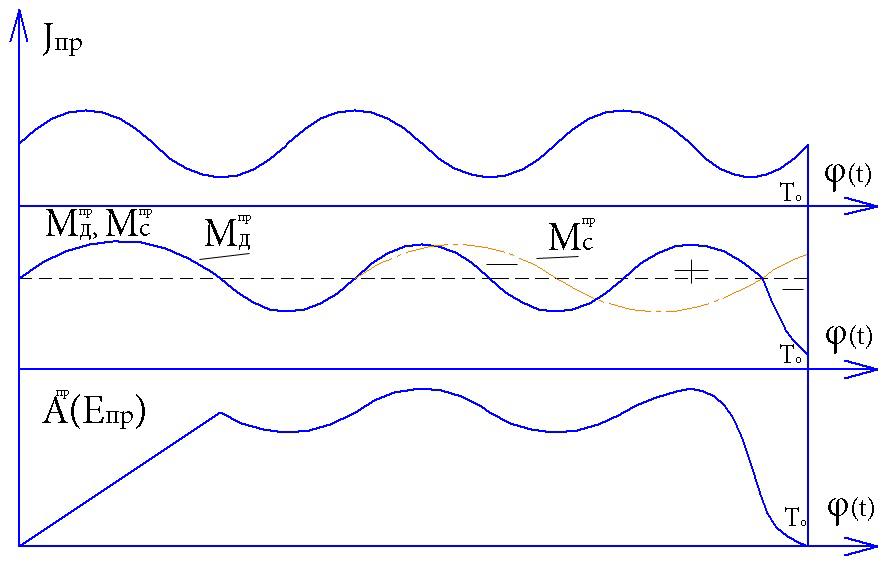
Пусть
![]() ;
;![]() ;
;![]() заданы в виде графиков, гдеTo
– время работы машины. Интегрируя
графики
заданы в виде графиков, гдеTo
– время работы машины. Интегрируя
графики
![]() и
и![]() можно определить соответствующие работы
можно определить соответствующие работы![]() ;
;![]() .
Работа определяется по графику (в)
, либо
.
Работа определяется по графику (в)
, либо
![]()
|
|
В
соответствии с теоремой об изменении
кинетической энергии зависимость
![]() f(φ)
численно равна изменению кинетической
энергии Eпр
= f(φ).
f(φ)
численно равна изменению кинетической
энергии Eпр
= f(φ).
Исключая независимую величину φ из графиков Jпр = f(φ) и Eпр = f(φ)
Строим диаграмму энергомасс (для простоты выполнения для одного цикла)
работы машины φц
|
|
kφ
= ….
kE
= ….
kJ
= ….
|
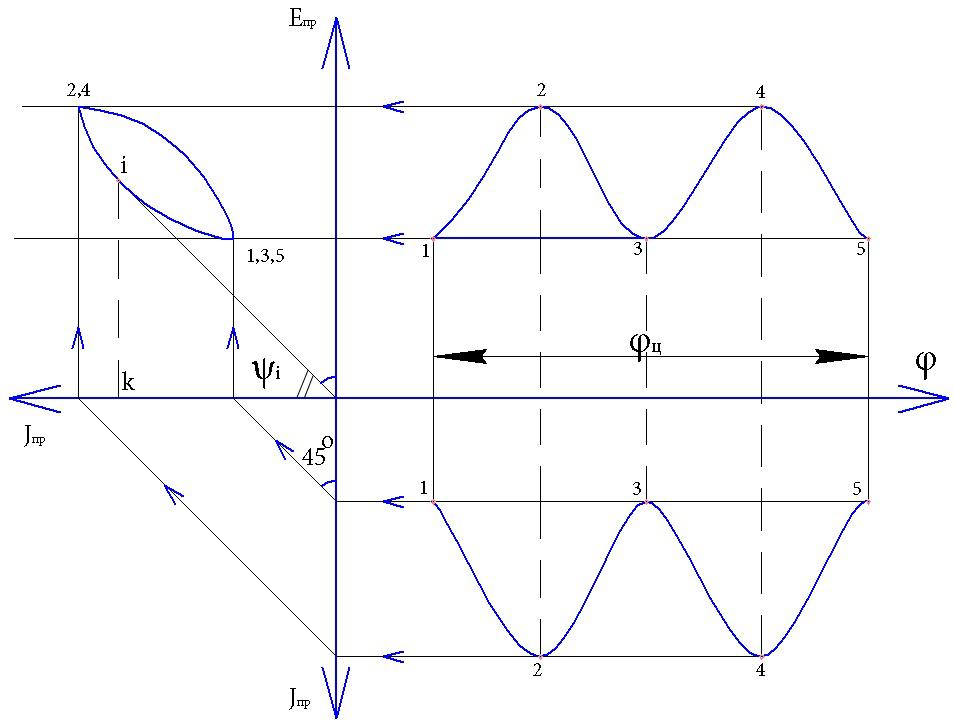
Возьмем произвольную точку i на диаграмме и соединим с началом координат. Определим tgψi
tgψi
=
![]() (18)
(18)
Выразив
из (18)
![]() подставим в (17) получим
подставим в (17) получим
![]() или
или![]() (19)
(19)
С помощью (19) и диаграммы энергомасс найдем искомую функцию ω = f(φ). Положим она выглядит таким образом:
![]()
![]() подставим
в верхнее и получим:
подставим
в верхнее и получим:
![]()
![]()
![]()
|
|
Нас интересует зависимость φ = f(t). Для ее определения воспользуемся приближенной формулой полученной таким образом:
![]()
![]() подставим
в верхнюю формулу
подставим
в верхнюю формулу
![]()
![]() (20)
(20)
Зная
зависимость φ = f(t)
дифференцируя, легко получим
![]()
Метод конечных разностей (метод Баранова)
При использовании этого метода исходное дифференциальное уравнение движения звена приведения (см. ур-е (15)) преобразуется к разностному уравнению следующим образом:
-

(21)
Подставляя
значения
![]() ;
;
![]() из
(21) в уравнение (15) и преобразовывая ее
получим следующую формулу:
из
(21) в уравнение (15) и преобразовывая ее
получим следующую формулу:
 (22)
(22)
При помощи (22) найдем закон движения входного звена т.к. функцию ωi =f(φi) а при помощи (20) и (21) – функции φ(t) и в(φ)
2 Неравномерность движения машинного агрегата
Постановка задачи
Анализ уравнения движения МА в дифференцируемой форме показывает, что в режиме установившегося движения практически невозможно обеспечить постоянства скорости движения ведущего звена из за необходимости выполнения в каждый момент времени двух условий :
равенства приведенных моментов движущих сил и сил сопротивления
постоянства приведенного момента инерции МА.
Действительно
если
![]() иJпр
= const
то уравнение (16) будет иметь вид
иJпр
= const
то уравнение (16) будет иметь вид
![]() (1)
(1)
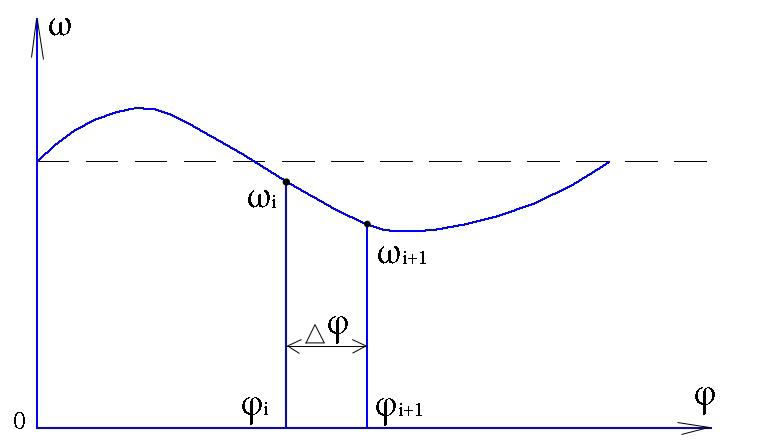
В реальных условиях эти два условия не выполняются, поэтому закон изменения угловой скорости ведущего звена в режиме установившегося движения обычно имеет вид какой то периодической функции с периодом φц где ω периодически изменяется относительно постоянной ωср которая является желательной для данного технологического процесса
|
|

Изменение реальной скорости относительно в цикле характеризуются коэффициентом неравномерности хода б
![]() (2)
(2)
Очевидно, что чем меньше б тем ближе функция ω(φ) к ωср = const и тем лучше выполняются условия технологических процессов и динамики движения МА. На практике принято, в зависимости от класса машин, ограничивать реальной некоторым предельным значением [б] так, чтобы в режиме установившегося движения обязательно выполнялось условие
б ≤ [б] (3)
Для реальных машин [б] изменяется в пределах 0.001-0.1 например, для самолетных двигателей [б] = 0.001; для сельхозтехмашин [б] = 0.1
Как при проектировании реальных машин обеспечить вышеупомянутое условие? Для этого воспользуемся теоремой об изменении кинетической энергии механической системы на интервале ωϵ[ωmin; ωmax]
Имеем:
∆A
= ∆E
≈
![]() (4)
(4)
Это
выражение справедливо при условии
![]() ≈const
которое допустимо т.к. обычно интервал
[ωmin,
ωmax]
достаточно мал. Поэтому можно принять
также следующее допущение:
≈const
которое допустимо т.к. обычно интервал
[ωmin,
ωmax]
достаточно мал. Поэтому можно принять
также следующее допущение:
ωcр
=
![]() (5)
(5)
Преобразуем (4)
![]() (6)
(6)
Подставим в (6) , (2) и (5) получим
б
![]() (7)
(7)
Из
(7) следует что для умножения б
необходимо увеличивать
![]() так как в реальной машине ∆E
и ωср
постоянны в цикле
так как в реальной машине ∆E
и ωср
постоянны в цикле
Поэтому
определение дополнительного приведенного
момента инерции
![]() машинного
агрегата и является главной задачей в
изучении неравномерности движения МА
в режиме установившегося движения. Этот
дополнительный приведенный момент
инерции называется приведенный момент
инерции маховых масс или маховика, а
его конструктивное оформление – маховик
машинного
агрегата и является главной задачей в
изучении неравномерности движения МА
в режиме установившегося движения. Этот
дополнительный приведенный момент
инерции называется приведенный момент
инерции маховых масс или маховика, а
его конструктивное оформление – маховик
Методы расчета маховых масс
Определение маховых масс с помощью диаграммы энергомасс.
Это
графоаналитический метод и используется
тогда, когда
![]() ;
;![]() и
и![]() –
существенно переменная величина.
–
существенно переменная величина.
Положим что имеется диаграмма энергомасс, построенная для цикла. Известно, что с ее помощью можно определить угловую скорость звена приведения в i-й момент времени с помощью зависимости
|
|
|
При решении задачи нам известны [б] и ωср, кроме того выполняется условие (3). Из (2) и (5) выразим значения ωmax и ωmin звена приведения на цикле через известные [б] и ωср. Получим:
ωmax
= ωср
(1+
![]() )
; ωmin
= ωср
(1-
)
; ωmin
= ωср
(1-
![]() )
(8)
)
(8)
Знаем:
б
=
![]() (a)
ωср
=
(a)
ωср
=
![]() (б)
(б)
ωmax = ωmin + ωср ∙ [б] из (б) ωmin = 2 ωср - ωmax тогда
ωmax = 2 ωср - ωmax + ωср ∙ [б] => 2 ωmax = 2 ωср + ωср ∙ [б]
|
ωmax
= ωср
(1+
|
ωmin = ωmax - ωср ∙ [б] из (б) ωmax = 2 ωср - ωmin тогда
ωmin = 2 ωср – ωmin - ωср ∙ [б] => 2 ωmin = 2 ωср - ωср ∙ [б]
|
ωmin
=
ωср
(1-
|
Из выражения для ωi, используя (8) найдем значения углов ψmax и ψmin которые будут соответствовать ωmax и ωmin
-
(9)
В
выражениях (9) величиной (![]() )2
пренебрегли, ввиду малости. Значения
масштабных коэффициентов kJ,
kE
берутся из графика. При экстремальных
значениях угловой скорости соответствующие
учи касаются диаграммы энергомасс.
Проведя такие лучи под углами ψmax
и ψmin
и касаясь ими диаграммы получим
изображение на графике.
)2
пренебрегли, ввиду малости. Значения
масштабных коэффициентов kJ,
kE
берутся из графика. При экстремальных
значениях угловой скорости соответствующие
учи касаются диаграммы энергомасс.
Проведя такие лучи под углами ψmax
и ψmin
и касаясь ими диаграммы получим
изображение на графике.
Если лучи пересекутся левее оси ординат в точке O1 , то маховик необходим и его приведенный момент будет определяться
Jнпр = kJ ∙O1 С кг∙м2 (10)
Если точка лежит вне предела чертежа то удобнее пользоваться формулой
Jнпр
=
![]() (11)
(11)
Она получается из рассмотрения ∆ O1oc и O1bc
Определения маховых масс с помощью графиков приведенных моментов движущих сил Мgпр и сил сопротивления Мспр.
В
данном случае можно приближенно находить
Jнпр
как в случае зависимости
![]() и
и
![]() ,
так и при функциях
,
так и при функциях
![]() и
и
![]() .
.
Подробнее остановимся на первом случае
Построим
заданный график зависимости
![]() за цикл
за цикл
|
|
|
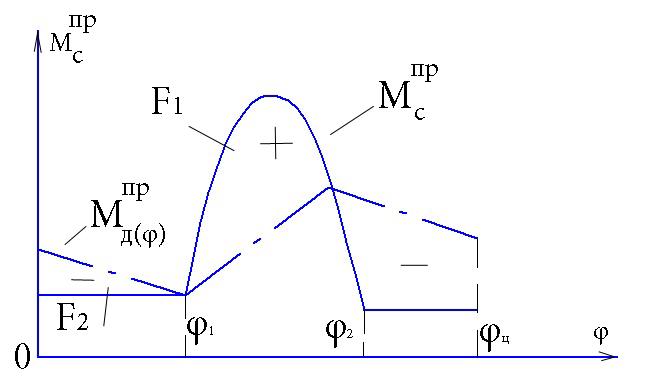
Поскольку
![]() ,
то в первом приближении построим
,
то в первом приближении построим![]() в виде некоторой ломанной линии, установив
при этом, что при
в виде некоторой ломанной линии, установив
при этом, что при![]() и
и![]()
![]() и
и![]() соответственно, а заштрихованные со
знаком (+)(+)F1
и (-) F2
равны. Первые два следуют из (1) , а
последнее из равенства работ
соответственно, а заштрихованные со
знаком (+)(+)F1
и (-) F2
равны. Первые два следуют из (1) , а
последнее из равенства работ
![]() в
цикле. Также можно считать, чтоJпр
≈ const.
в
цикле. Также можно считать, чтоJпр
≈ const.
Поскольку площади F1 (или F2) выражают избыток энергии, которая должна быть «поглощена» машины, то на основании теоремы об изменении кинетической энергии имеем.
![]() (12)
(12)
Где
![]() (масшт.
Коэфф.kм
, kφ
и площадь F1
из графика)
(масшт.
Коэфф.kм
, kφ
и площадь F1
из графика)
На
основании допущений
![]() (
(![]() - требуемый привод. Момент инерции МА)
- требуемый привод. Момент инерции МА)![]() ,
а
,
а![]() ,
что следует из физического смысла
зависимостей
,
что следует из физического смысла
зависимостей![]() ,
,![]() и
равенства (1)
и
равенства (1)
Из (12) следует
![]()
Поскольку
машина уже обладает определенным
![]() ,
то
,
то
![]() (13)
(13)
Если
![]() ,
то маховик не нужен
,
то маховик не нужен
Элементы конструирования маховика.
Если
маховик необходим, то обычно его стараются
совместить со звеном приведения. Как
правило маховик выполняется в виде
диска или кольца. Размеры этих маховиков
можно определить исходя из обеспечения
требуемого
![]() .
.
![]() - для диска
- для диска
![]() -
для кольца. Здесь m
– масса маховика
-
для кольца. Здесь m
– масса маховика
Для
уменьшения размеров маховика желательно
его устанавливать на наиболее быстроходном
звене. При этом необходимо пересчитать
значение
![]() по формуле:
по формуле:
![]()
![]() ,
ωср,
ωб
– известны, а
,
ωср,
ωб
– известны, а
![]() определяем и далее находим новые размеры
маховика.
определяем и далее находим новые размеры
маховика.
Физический смысл «работы» маховика в накоплении и отдаче энергии
Основы теории автоматического регулирования машин (САР)
Постановка задачи. Основные понятия САР
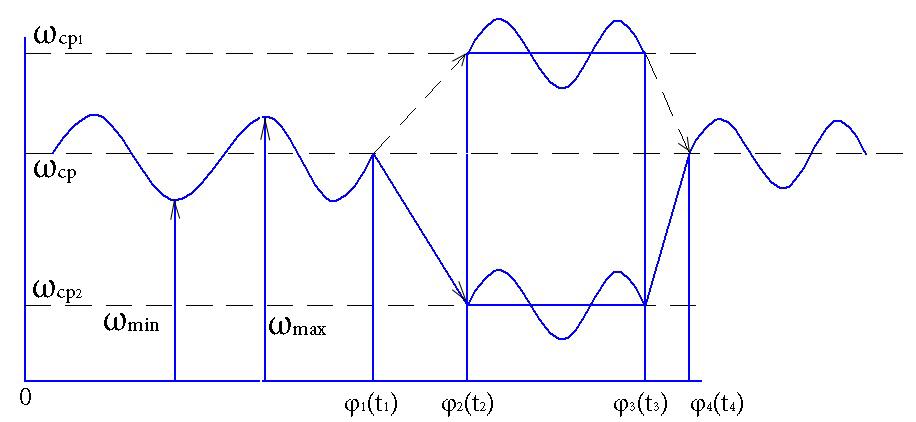
Рассмотрим
установившееся движение МА. В некоторый
момент времени t1
из за случайного изменения энергии,
поступаемой к машине, номинальная ωср
за некоторый интервал
![]() становится
равной ωср1
> ωср
или ωср2
< ωср.
Изменение ωср
до ωср1
или
ωср2
зависит
от того, больше или меньше энергии от
номинального значения соответственно
поступило в машину, а интервал [t1;t2]
от физических свойств машин и условий
ее работы. Для нормальных условий работы
МА необходимо предусмотреть в нем
устройство которое бы за некоторый
интервал времени возвратило его движение
к прежней номинальной угловой скорости
ωср
становится
равной ωср1
> ωср
или ωср2
< ωср.
Изменение ωср
до ωср1
или
ωср2
зависит
от того, больше или меньше энергии от
номинального значения соответственно
поступило в машину, а интервал [t1;t2]
от физических свойств машин и условий
ее работы. Для нормальных условий работы
МА необходимо предусмотреть в нем
устройство которое бы за некоторый
интервал времени возвратило его движение
к прежней номинальной угловой скорости
ωср
|
|
Исследование условий, при которых возможна такая работа машины, и составляет содержание поставленной задачи. В обзем случае возможна и точная постановка задачи когда требуется изменение по определенному закону. Все это решается с помощью САР.
Основные элементы необходимые машине с САР.
Знаем: Д – двигатель , ПМ – передаточный механизм, ИМ – исполнительный механизм
Прежде всего – это наличие обратной связи между входом и выходом
Система автоматического регулирования движения механизма
|
|

Обратную связь обеспечивает механизм 2, измеряющий выходной параметр (ω) , регулятор 3, который принимает сигнал от механизма 2, сравнивает его с эталонным и в случае их рассогласования (до определенного предела) подает соответствующий сигнал на механизмы 1. регулирующий подачу энергии к машине. Основным элементом САР является регулятор от которого зависит точность работы. Из-за этого чисто используется непрямая САР имеющая дополнительно элемент 4 – усилитель сигнала вызываемого регулятора.
В МА наиболее распространены следующие типы регуляторов скоростей:
Центробежные, инерционные, тахорегуляторы.
Более подробно рассмотрим работу машины с ц.б. регулятором.
Схема МА с центробежным регулятором скорости
|
|
Работа регулятора |

Изменения угловой скорости соответствует интервалам [t1;t2] ; [t3;t4] и характеризует динамику работы регулятора.
Для составления уравнения движения динамической модели машина с регулятором (для машин с 1 степенью свободы это нелинейное дифференциальное уравнение 3 порядка ) необходимы конкретные технические данные машины.
Поэтому динамика движения машины с САР обычно используется в спецкурсах. Однако для успешной работы машины с САР необходимо выбрать основные физико-геометрические параметры регулятора так, чтобы он двигался в соответствии с вышесказанным. Для этого необходимо рассмотреть более простую задачу – кинетостатика регулятора т.е. его равновесное состояние при некоторой постоянной угловой скорости.
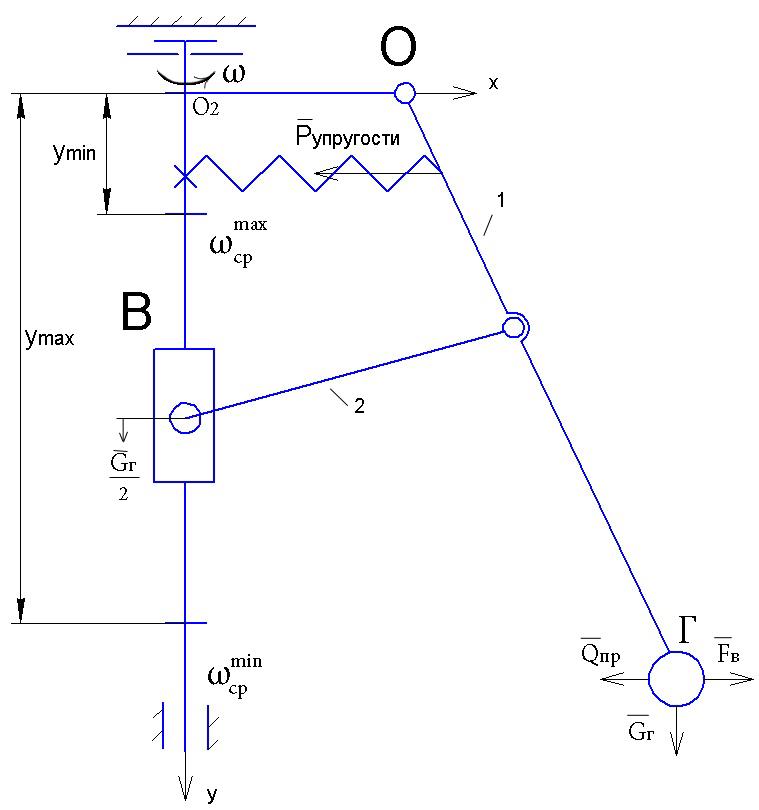
Кинетостатика Ц.Б. регулятора (регулятор как бы неподвижен ω = const)
Регулятор симметричен поэтому будем рассматривать только его половину
|
|
На груз действуют |
|
| |
|
Fи = - mгaг = - mг r ω2 = f1(r) | |
|
-центробежная сила | |
|
Qпр = f (Pупр, G, Gмуфты) = f2(r) | |
|
-характеристика регулятора | |
|
1. При Fи = Qпр → r = const | |
|
2. При Fи < Qпр → r ↑ (увеличивается) | |
|
3. При Fи > Qпр → r ↓ (уменьшается) |
В зависимости от физико-геометрических размеров регулятора зависимость Qпр по отношению к Fи может иметь 3 характера:
|
|
|
|
|
Устойчивая хар-ка регулятора |
Неустойчивая хар-ка регулятора |
Астатическая хар-ка на всем промежутке уравновешена |
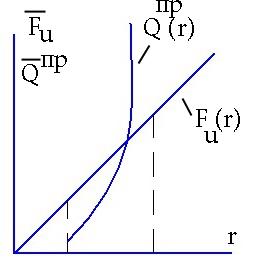


Признак устойчивости должен выполняться во всех диаграммах изменения скоростей ωmin≤ ω ≤ ωmax и проектируемой Ц.Б. регулятора