

2. Программа lrkla 1
Для расчета
параметров орбиты перелета ρ,
e
и ![]() составлена программа LRKLA
1.
составлена программа LRKLA
1.
Перед запуском программы необходимо ввести исходные данные:
RФ=![]() - длина начального радиуса-вектора, км;
- длина начального радиуса-вектора, км;
RK=![]() – длина конечного радиуса-вектора, км;
– длина конечного радиуса-вектора, км;
FF=Ф – угловая дальность, рад;
Q=μ
– гравитационный параметр, ![]() /
/![]() ;
;
TPOL=![]() - время перелета, сутки;
- время перелета, сутки;
EPS=
β – погрешность вычисления полуоси
![]() ,
км.
,
км.
В программе реализован рассмотренный выше алгоритм.
Программа позволяет производить расчёт для трёх типов орбит: эллиптической, гиперболической и параболической.
В результате
выполнения программы вычисляются
параметры орбиты: p
- фокальный параметр; E=e
- эксцентриситет; A=a
-большую полуось(км); а также![]() – скорость в начальной точке;
– скорость в начальной точке; ![]() -скорость
в конечной точке.
-скорость
в конечной точке.
Скорость для начальной и конечной точки орбиты вычисляется из закона сохранения энергии:

Блок-схема программы LRKLA1 приведена на рис. 1.3.
В программе для решения трансцендентных уравнений(1.1), (1.2) методом хорд используется подпрограмма TRANS, из которой происходит обращение к подпрограммам GRAN и YRAN.
Подпрограмма GRAN служит для задания минимального a1 и максимального значения a2 полуоси орбиты по формулам (1.6), (1.7).
Подпрограмма YRAN вычисляет функцию невязки y(a) (см. формулу(1.8)).
Параметры
орбиты ![]() вычисляются по формулам (1.3)- (1.5) с помощью
подпрограммы PARAM,
а также скорости
вычисляются по формулам (1.3)- (1.5) с помощью
подпрограммы PARAM,
а также скорости ![]() и
и![]() по формуле (1.10).
по формуле (1.10).
3. Порядок выполнения работы.
Требуется рассчитать траекторию перелёта с круговой орбиты Земли на круговую орбиту Марса. Будем считать, что орбиты планет и траектория перелёта лежат в одной плоскости. Орбиты Земли и Марса считаем круговыми.
При расчёте траектории всё пространство разбиваем на три области- грависферы с преобладающим влиянием на траектории только одного гравитирующего тела (Земли, Солнца, Марса). В этом случае в каждой области для расчёта траектории можно воспользоваться решением задачи двух тел и получить «куски» траектории КА в грависферах, а затем собрать эти «куски» на границах грависфер.
На этапе движения КА в грависфере Земли решается задача двух тел Земля- КА. Этап заканчивается в момент выхода КА из грависферы Земли. Этот участок траектории называется геоцентрическим.
После выхода из грависферы Земли движение КА происходит в грависфере Солнца. На этом участке, называемом гелиоцентрическим, траектория КА исследуется в рамках задачи двух тел Солнце- КА. Начальными условиями для гелиоцентрического участка являются характеристики траектории в конце геоцентрического участка.
После выхода траектории в грависферу Марса решается задача двух тел Марс- КА.
Рассмотренный метод грависфер даёт достаточно высокую точность при проектных исследованиях и очень высокую точность оценки энергетических затрат на перелёт.
При проектировании траектории межпланетного перелёта КА чаще всего сначала рассчитываются гелиоцентрический участок полёта. В рамках анализа только этого участка часто удаётся выбрать рациональную схему полёта, оптимальную дату старта, целесообразное время и т. д. Кроме этого, гелиоцентрический участок полёта по продолжительности и протяжённости является определяющим во всём перелёте.
При расчёте гелиоцентрического участка полёта удаётся решить основную задачу полёта- попасть в окрестность планеты назначения.
Расчёт гелиоцентрического участка полёта производится в предположении, что радиусы гравитационных сфер планет равны нулю. В этом случае считается, что межпланетный участок траектории КА начинается в точке, где располагается центр Земли (а самой Земли и её грависферы нет). Гелиоцентрический участок траектории заканчивается в точке, где располагается планета назначения- Марс.
Время начала гелиоцентрического участка траектории считается равным времени старта КА с орбиты искусственного спутника Земли. Аналогичные допущения делаются при анализе времени полёта КА к планете цели.
Рассмотрим расчёт гелиоцентрического участка траектории (рис 1.4).
Энергетически
оптимальный, обеспечивающий перевод
КА с орбиты Земли 1 на орбиту Марса,
является траектория, касательная к
исходным орбитам при угле перелёта ![]() и с большой полуосью
и с большой полуосью ![]() Это так называемый оптимальный гомановский
эллипс. В этом случае для перевода КА
на межпланетную траекторию его нужно
разогнать относительно Земли до скорости
Это так называемый оптимальный гомановский
эллипс. В этом случае для перевода КА
на межпланетную траекторию его нужно
разогнать относительно Земли до скорости
![]() ,
которая определяет энергетику, необходимую
для реализации перелёта. Здесь
,
которая определяет энергетику, необходимую
для реализации перелёта. Здесь ![]() -
скорость Земли относительно Солнца,
средняя скорость Земли
-
скорость Земли относительно Солнца,
средняя скорость Земли ![]() .
При движении по оптимальному гомановскому
эллипсу
.
При движении по оптимальному гомановскому
эллипсу ![]() имеет минимальное значение.
имеет минимальное значение.
Время перелета с орбиты 1 на орбиту 2 в этом случае определяется формулой
![]() = π
= π![]() (1.11)
(1.11)
Для встречи
с Марсом в точке ![]() необходимо. Чтобы в момент старта Марс
находился в точке
необходимо. Чтобы в момент старта Марс
находился в точке ![]() , смещенным относительно точки встречи
, смещенным относительно точки встречи
![]() на угол
на угол ![]() = (2 π/
= (2 π/![]() )
)![]() ∙57,3,
где
∙57,3,
где ![]() = 687 сут. – период обращения Марса вокруг
Солнца.
= 687 сут. – период обращения Марса вокруг
Солнца.
Учитывая,
что ![]() =132,718∙
=132,718∙![]()
![]() /
/![]() ;
;
![]() =
= ![]() =149,6∙
=149,6∙![]() км;
км;
![]() =
= ![]() = 227,9∙
= 227,9∙![]() км, из (1.11) получаем
км, из (1.11) получаем ![]() = 259 сут.
= 259 сут.
За время полета КА по гомановской траектории Земля сместится на угол
![]() = (2 π/
= (2 π/![]() )
)![]() ∙57,3
=
∙57,3
= ![]() ,
где
,
где ![]() = 365 сут.
= 365 сут.
Так как реализация оптимальных полетов требует вполне определенного расположения Марса относительно Земли, а такие ситуации возникают довольно редко (через 2,14 года), то перелеты происходят не по энергетически оптимальным траекториям.
При выполнении
лабораторной работы нужно определить
параметры траектории по данным,
приведенным в таблице 1.1, а также параметры
ρ
и e
оптимальной гомановской траектории.
Кроме того, необходимо исследовать
влияние времени перелета ![]() на энергетику старта с орбиты спутника
Земли и перехода на орбиту спутника
Марса.
на энергетику старта с орбиты спутника
Земли и перехода на орбиту спутника
Марса.
Таблица 1.1
|
Номер варианта |
Ф, рад |
|
|
|
|
4 |
2,3 |
180 |
230 |
280 |
![]()
Результаты расчетов:
|
tп, сут |
V0, км/с |
Vk, км/с |
p |
e |
a, км |
|
180 |
33.0340 |
21.9463 |
1.7413e+008 |
0.3222 |
1.9430e+008 |
|
230 |
32.2767 |
20.7891 |
1.3526e+008 |
0.5034 |
1.8118e+008 |
|
280 |
30.1416 |
19.4361 |
1.2047е+008 |
0.7080 |
1.3301e+008 |

Рисунок 1. Траектория при Тп = 180 сут
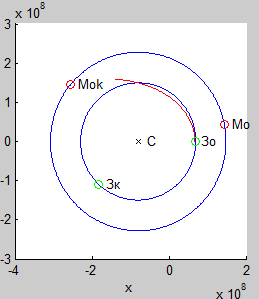
Рисунок 2 Траектория при Тп = 230 сут

Рисунок 3. Траектория при Тп = 280 сут
Код программы:
function mars()
% ввод начальных значений
r0 = 149.6*10^6; %длина начального РВ, км
rk = 227.9*10^6; %длина конечного РВ, км
Fi = 2.3; %угловая дальность, рад
mu = 132.718*10^9; %грав. пар-р Солнца
tp1 = 280*3600*24; %время перелета, с
eps = 8; %погрешность вычисления большой полоуоси, км
i=0;
S = sqrt(r0^2+rk^2-2*r0*rk*cos(Fi));
tpar = ((r0+rk+S)^(1.5)-((r0+rk-S)^(1.5))*sign(sin(Fi)))/(6*sqrt(mu));
del = (tp1-tpar)/3600/24;
if(del<0) %орбита гиперболическая
a1 = r0/50; %минимальное значение большой полоуоси
a2 = rk*10; %максимальное значение большой полоуос
ya3 = 9000;
while(ya3>6*10^(-9))
a3 = a1 - (y(r0,rk,S,Fi,mu,a1,tp1)/(y(r0,rk,S,Fi,mu,a2,tp1)-y(r0,rk,S,Fi,mu,a1,tp1)))*(a2-a1);
ya3 = y(r0,rk,S,Fi,mu,a3,tp1)
if(ya3*y(r0,rk,S,Fi,mu,a1,tp1)<0)
a2=a3;
else
a1=a3;
end
end
%break;
else% орбита эллипт.
a1 = (r0+rk+S)/4;
a2 = 6*rk;
ya3 = 9000;
while(abs(a2-a1)>eps)
a3 = a1 - (y2(a1)/(y2(a2)-y2(a1)))*(a2-a1);
i = i+1;
ya3 = y2(a3);
if(y2(a3)*y2(a1)<0)
a2=a3;
else
a1=a3;
end
if(i>1000)
break;
end
end
a = a3
end
alpha = 2*asinh((r0+rk+S)/4*abs(a));
beta = 2*asinh((r0+rk-S)/4*abs(a));
gm = 2*asin(sqrt((r0+rk-S)/(r0+rk+S)));
tm = ((r0+rk+S)^(1.5))/(8*sqrt(mu))*(pi-sign(sin(Fi))*(gm-sin(gm)));
p = a/S^2*4*r0*rk*(sin(Fi/2))^2*(sin((alpha+sign(sin(Fi))*sign(tm-tp1)*beta)/2))^2
e = sqrt(1-p/a)
v0 = sqrt(mu*(2/r0-1/a))
vk = sqrt(mu*(2/rk-1/a))
%end
t=[0:pi/180:2*pi];
axis equal
plot(r0*cos(t),r0*sin(t),'k',rk*cos(t),rk*sin(t),'k');
hold on
plot(r0,0,'ro');
t = [0:pi/180:2*pi/687/24/3600*tp1];
plot(r0*cos(t)+(rk-r0)/1.64.*t.*cos(t),r0*sin(t)+(rk-r0)/1.64*t.*sin(t));
plot(rk*cos(2*pi/687/24/3600*tp1),rk*sin(2*pi/687/24/3600*tp1),'ro')
end
function F = y(r0,rk,S,Fi,mu,a,t)
alpha = 2*asinh((r0+rk+S)/4*abs(a));
beta = 2*asinh((r0+rk-S)/4*abs(a));
tp = sqrt((abs(alpha))^3/mu)*(sinh(alpha)-alpha-sign(sin(Fi))*(sinh(beta)-beta));
F = t-tp;
end
function F2 = y2(a)
r0 = 149.6*10^6; %длина начального РВ, км
rk = 227.9*10^6; %длина конечного РВ, км
Fi = 2.3; %угловая дальность, рад
mu = 132.718*10^9; %грав. пар-р Солнца
tp1 = 280*3600*24; %время перелета, с
S = sqrt(r0^2+rk^2-2*r0*rk*cos(Fi));
tpar = ((r0+rk+S)^(1.5)-((r0+rk-S)^(1.5))*sign(sin(Fi)))/(6*sqrt(mu));
gm = 2*asin(sqrt((r0+rk-S)/(r0+rk+S)));
g = 2*asin(sqrt((r0+rk-S)/(4*abs(a))));
e = 2*asin(sqrt((r0+rk+S)/(4*abs(a))));
tm = ((r0+rk+S)^(1.5))/(8*sqrt(mu))*(pi-sign(sin(Fi))*(gm-sin(gm)));
tp = ((a^(1.5))/sqrt(mu))*(pi+sign(tm-tp1)*(e-sin(e)-pi)-sign(sin(Fi))*(g-sin(g)));
F2 = tp1-tp;
end