

Глава 2 мпсу управляемыми выпрямителями
2.1. Типовая структура Системы автоматического регулирования электропривода постоянного тока
Как и в курсе силовой электроники, где изучение вентильных преобразователей начинается с выпрямителей, в настоящем учебном пособии рассмотрение микропроцессорных систем вентильными преобразователями также начинается с МПСУ управляемым выпрямителем.
Следуя тезису о разработке оптимальной микропроцессорной системы, вначале рассмотрим объект управления – выпрямитель, причем в составе электропривода постоянного тока (наиболее распространенный и сложный вариант применения управляемого выпрямителя). Типовая структура электропривода в упрощенном виде приведена на рис. 2.1.
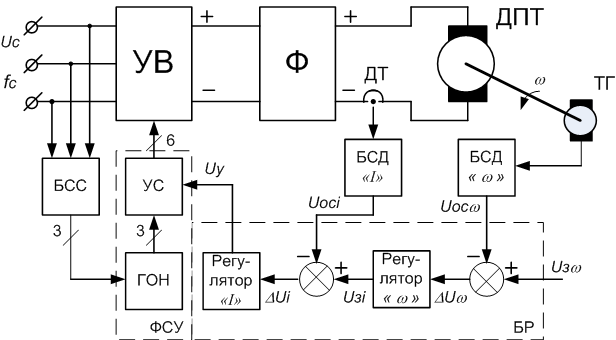
Рис. 2.1
В силовой канал электропривода входят управляемый выпрямитель, фильтр (Ф) и двигатель постоянного тока (ДПТ). Также в силовом канале присутствуют датчик тока (ДТ) и датчик скорости (тахогенератор – ТГ). Назначение всех этих компонентов понятно и поэтому здесь не рассматривается.
Замечание. В большинстве случаев в промышленных установках используется трехфазный мостовой управляемый выпрямитель. Именно этот тип вентильных преобразователей рассмотрен в данном учебном пособии.
В информационно-управляющий канал электропривода входят следующие основные компоненты: блок синхронизации с сетью (БСС), фазосдвигающее устройство (ФСУ) (в некоторых изданиях это устройство называют системой импульсно-фазового управления), блок регуляторов (БР) и блоки сопряжения с датчиками (БСД) тока и скорости. Назначение блоков следующее.
Блоки сопряжения с датчиками обеспечивают гальваническую развязку цепей системы управления от цепей силовой схемы и формирование требуемого уровня соответствующего сигнала обратной связи (Uос или Uосi).
Блок регуляторов формирует по сигналам задания и обратной связи в соответствии со стратегией управления сигнал управления Uy.
Блок синхронизации с сетью предназначен для формирования синхросигналов, характерные точки которых (нулевые или экстремальные) совпадают с точками естественной коммутации вентилей управляемого выпрямителя.
Фазосдвигающее устройство предназначено для формирования управляющих импульсов, сдвинутых во времени на требуемый интервал относительно характерных точек синхронизирующих сигналов, т.е. точек естественной коммутации.
Сдвиг реализуется следующим образом. Синхросигналы с блока синхронизации с сетью запускают генератор опорных напряжений, входящий в состав фазосдвигающего устройства. Сформированная система опорных напряжений, имеющих или пилообразную, или синусоидальную форму, сравнивается в устройстве сравнения – УС (набор компараторов) с управляющим сигналом Uy. Момент сравнения определяет окончание формирования угла управления и начало формирования соответствующего импульса управления. В блоке устройства сравнения также импульсы управления формируются по длительности и распределяются по вентилям. Более подробно о принципах работы системы управления управляемым выпрямителем и реализуемых в ней законах управления можно прочитать в работах [231, 27].
Система регулирования, построенная по двухконтурной схеме подчиненного регулирования, содержит два контура (см. рис. 2.1): внешний – медленный (по скорости) и внутренний – быстрый (по току). Информация в каждый контур о регулируемом параметре (сигнал обратной связи) поступает с блока сопряжения с датчиком на соответствующий сумматор – на отрицательный вход. На положительный вход сумматора подается сигнал задания. Разностный сигнал (U или Ui) поступает на соответствующий регулятор, который может быть любого типа: П-, ПИ-, ПИД-, И- и т. д.
Принцип подчиненного регулирования заключается в том, что внешний контур скорости формирует для внутреннего токового контура сигнал задания Uзi, который этот контур и должен отработать. В соответствии с этим в системе регулирования имеется только один внешний сигнал задания – по скорости Uз. Выходной сигнал внутреннего контура есть управляющий сигнал для фазосдвигающего устройства.
С точки зрения управления выпрямителем основными блоками системы, представленной на рис 2.1, являются блок синхронизации с сетью и фазосдвигающее устройство, а остальные имеют вспомогательное значение. Этому имеется следующее объяснение. Во-первых, именно с помощью названных блоков реализуется принцип фазового управления, синхронизированного с сетью. Во-вторых, система управления управляемым выпрямителем вообще может быть построена только на их основе и потенциометре, с помощью которого оператор может устанавливать сигнал задания. Правда, это уже будет система без обратной связи, т.е. разомкнутая, или, как говорят, программная. Этот тандем (блок синхронизации с сетью и фазосдвигающее устройство) часто называют программной частью системы управления управляемым выпрямителем. В дальнейшем, при изучении МПСУ управляемым выпрямителем, будем иметь в виду прежде всего программную часть. Именно в ней отражена специфика управления выпрямителем, а также всеми остальными вентильными преобразователями с естественной коммутацией, к которым относятся зависимые инверторы, непосредственные преобразователи частоты с фазовым регулированием [28] и регуляторы переменного напряжения с фазовым способом регулирования.
Предварительно рассмотрим типовую структуру МПСУ управляемым выпрямителем в целом в соответствии с тем объемом задач и теми функциями, которые в общем случае эта система должна выполнять.