

Лабораторная работа №3 качество переходных процессов
Цель работы: освоение методов расчетного и экспериментального определения и анализа качества переходных процессов.
Постановка задачи: Работа системы автоматического управления помимо устойчивости оценивается и рядом показателей, основными из которых являются точность отработки входных воздействий и характер переходных процессов.
Теоретические сведения
Рассмотрим систему стабилизации (рис. 3.1), для которой входное воздействие является постоянной величиной, и цель регулирования заключается в том, чтобы выполнялось условие:
![]() .
.

Рис. 3.1. Структурная схема одноконтурной системы автоматического регулирования
В такой системе возможны два вида переходных процессов:
- при действии на объект возмущения со стороны нагрузки на технологический объект;
- при действии на объект возмущения в виде изменения сигнала задания на регулятор.
В первом случае система должна скомпенсировать внешнее возмущение. Во втором случае точно повторить сигнал задания.
При этом для работоспособности системы необходимо, чтобы процесс регулирования осуществлялся при обеспечении определенных качественных показателей.
Такими показателями являются:
- ошибка регулирования (статическая и динамическая);
- время регулирования;
- степень затухания;
- перерегулирование.
А также корневые показатели качества:
-степень устойчивости;
-степень колебательности.
Рассмотрим каждый из этих критериев.
1. Ошибка регулирования
Статическая ошибка регулирования yстравна разности между установившемся значением регулируемого параметра и его заданным значением y0 (рис. 3.2).
y
Рис. 3.2. Пример изменения статической и динамической ошибки.
Динамической ошибкой будем называть величину, равную наибольшему отклонению регулируемой величины от ее установившегося значения:
![]() ,
,
Следует отметить, что статическая ошибка является одной из основных количественных характеристик процессов системы. Ее можно определить теоретически, зная передаточные функции объекта и регулятора:
![]() ,
,
где kр, kоб– коэффициенты усиления объекта и регулятора (для П-регулятора kр= С1).
2. Быстродействие
В качестве оценок быстродействия используется время переходного процесса (время регулирования) (рис. 3.3).

Рис. 3.3. Иллюстрация оценки быстродействия.
Время регулирования tпп – время от начала переходного процесса до момента, когда разность между текущим значением регулируемого параметра и его установившимся значением становится меньше допустимого отклонения:
![]() .
.
Обычно в качестве берут 5%-ое отклонение от yуст
3. Перерегулирование.
Эта количественная оценка характеризует колебательные свойства системы, обозначается буквой и определяется в процентах относительно установившегося значения (рис. 3.4) по выражению:
![]() .
.
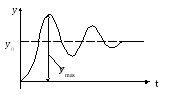
Рис.3.4. Иллюстрация оценки перерегулирования.
4. Коэффициент затухания
Количественной оценкой интенсивности затухания колебательных процессов служит степень затухания ψ, определяемая по формуле:
![]() .
.
Параметры y1и y3определяются так, как показано на рис. 3.5. Очевидно, что степень затухания изменяется от 0 до 1.

Рис. 3.5. Иллюстрация к определению коэффициента затухания.
Все рассмотренные критерии могут отображены на графике переходного процесса следующим образом ( рис. 3.6):
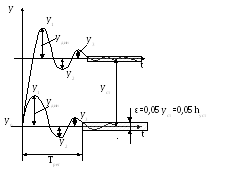
Рис.3.6. Показатели качества переходного процесса.
Как известно, вид корней характеристического уравнения определяет характер переходных процессов в системе автоматического управления. Поэтому можно сформулировать требования по запасу устойчивости и быстродействию системы, не рассматривая самих переходных процессов, а накладывая определенные условия на корни характеристического уравнения.
Для оценки быстродействия системы может использоваться понятие степени устойчивости.
Под степенью устойчивости понимается абсолютное значение вещественной части ближайшего к мнимой оси корня (рис. 3.7). Здесь могут быть два случая: когда ближайший корень является вещественным, (рис. 3.7 а) и когда к мнимой оси ближе всего расположена пара комплексных корней (рис. 3.7 б).

а) б)
Рис.3.7. Расположение корней на комплексной плоскости.
Корни характеристического уравнения, расположенные ближе всего к мнимой оси, т.е. имеющие наименьшую по абсолютной величине вещественную часть, дают в переходном процессе члены, которые затухают наиболее медленно.
Склонность системы к колебаниям будет
наблюдаться, если в решении
характеристического уравнения будут
присутствовать комплексные корни вида
![]() .
.
Степень колебательности m равна минимальному (для всех корней характеристического уравнения системы) модулю отношения действительной и мнимой частей корня:
 .
.
Для пояснения этого определения проведем в плоскости корней характеристического уравнения два луча ОА и ОВ (рис. 3.8) таким образом, чтобы одна пара корней находилась на этих лучах, а все остальные корни лежали слева от них. Тогда тангенс угла, заключенного между этими лучами и мнимой осью, будет равен отношению действительной и мнимой частей корней, лежащих на лучах ОА и ОВ, и являются степенью колебательности m системы, т.к. для других корней это отношение будет больше, чем m.

Рис. 3.8 Иллюстрация к понятию степени колебательности переходного процесса.