

9_Колебания систем с многими степенями св
.doc
2. Колебания упругих систем с многими степенями свободы
2.1. Свободные колебания

Jj (t)= −mjÿj(t)
при j = 1, 2, ……n.
yk(t)=δk1J1(t) + δk2J2(t) + ...+
+ δkkJk(t) + ... +
+ δkjJj(t) + δknJn(t)
yk1(t)+ δk1 m1ÿ1(t)+
+ δk2 m2ÿ2(t) + ...+
+ δkk mkÿk(t)+ ... +
+ δkn mnÿn(t) = 0
yk(t)=ak sinωt,
ÿk(t)= −ω2 ak sinωt.
a1δk1 m1ω2+ a2δk2 m2ω2+ ...+ +ak(δkk mkω2−1)+ ... +
+anδkn mnω2 = 0
a1δk1 m1+ a2δk2 m2+ ...+
+ak(δkk mk – 1/ω2)+ ... +
+anδkn mn = 0
k = 1, 2, ……n
-
ak = 0 2. ak ≠ 0




-
D(B) = ∏ λi
-
Sp B =∑bii = ∑ λi
Пример 6.








 .
.
λ= 2EI/9mω2
 .
.
(8 – λ)(4 – λ) − 3·6 = 0
λ 2 – 12 λ + 14 = 0
λ 1 = λmax= 10,69; λ 2 = 1,31.
Проверки:

-
D(B) = 8·4 – 3·6 = 14;
∏ λi = 10,69·1,31 = 14,0039
D(B) ≈ ∏ λi
погрешность 0,0028 %
-
Sp B =∑bii = 8 + 4 = 12;
∑ λi = 10,69 + 1,31=12.
Sp B =∑ λi.



(8 – λi)v1i + 6v2i = 0,
3v1i + (4 – λi)v2i = 0
.
1 – я форма колебаний:
λ 1 = λmax= 10,69.
(8 – λ1)v11 + 6v21 = 0,
если v 11 =1, v21 = 0,448

2 – я форма колебаний:
λ 2 = 1,31
(8 – λ2)v12 + 6v22 = 0
если v12 =1, v22 = – 1,116.

-
Вынужденные
колебания
при действии вибрационной нагрузки

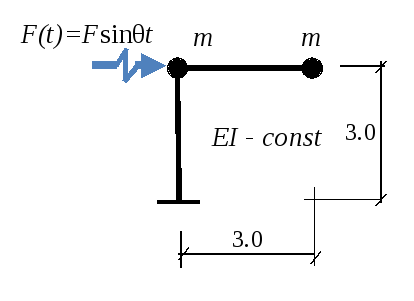
.F(t) = Fsinθt; q(t) = qsinθt; M(t) = Msinθt
S(t) = S sinθt; Δ(t) = Δ sinθt
yk(t)=δk1J1(t) + δk2J2(t) + ... + +δkkJk(t) + ... + +δknJn(t)+ΔkFsinθt
yk(t)=ak sinθt,
Jk (t)= −mkÿk(t) = akmk θ2 sinθt = Jk sinθt.
Jk=akmkθ2
ak = Jk /mkθ2.

Jksinθt/mkθ2= δk1J1sinθt+ +δk2J2sinθt+ ...+ δkk Jksinθt+ ...+ δknJnsinθt +ΔkFsinθt
δk1J1+ δk2J2 + ...+
+ (δkk −1/mkθ2)Jk +
+...+ δknJn + ΔkF = 0

δk1J1+
δk2J2
+ ...+
![]() Jk
+
...+ +δknJn
+ ΔkF
=
0
Jk
+
...+ +δknJn
+ ΔkF
=
0
(k = 1, 2, ……n)
Sk = Sk1J1+ Sk2J2 + ...+
+ Skk Jk + ...+ SknJn + SkF,
Пример 7. Построить Mдин
при F(t) = 120sinθt (кН), θ = 0,7ωmin.

Расчетная схема при sinθt =1









− 62,224J1 + 13,5J2 + 1620 = 0,
13,5J1 − 40, 112J2 +1080 = 0
J1 = 34,387 кН, J2 = 38,498 кН
Mдин = M1 J1 + M2 J2 + MF



Относительные жёсткости стержней рамы:
-
стойки i1 = EI/6 = i;
-
левого ригеля i2 = 2EI/8 = 1,5i;
-
правого ригеля i3 = 1,5EI/6 = 1,5i.
Свободные колебания






Состояние
1
,





Состояние
2





Вспомогательное
состояние
1


Вспомогательное
состояние
2






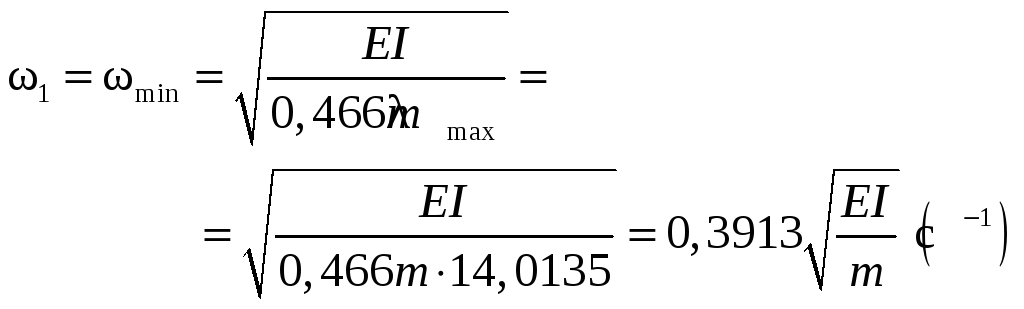
Умножим все члены на EI/0,466m
Обозначим λ= EI/(0,466mω2)
 .
.
(13,815 – λ)(3,94 – λ) − 2 = 0
λ 2 – 17,555 λ + 52,431 = 0
λ 1 = λmax= 14,0135; λ 2 = 3,7415
Проверки:

1-я проверка: D(B) = 13,815·3,94 – 2·1 = 52,4311
∏ λi = 14,0135·3,7415 = 52,4315
D(B) ≈ ∏ λi погрешность 0,003
2-я проверка: Sp B =∑bii = 13,815 + 3,94 = 17,755
∑ λi = 14,0135 + 3,7415 = 17,755
Sp B =∑ λ

Построение форм колебаний:
(13,815 – λi)v1i − v2i = 0,
−3v1i + (3,940 – λi)v2i = 0
1 – я форма колебаний.
λ 1 = λmax= 14,0135
(13,815 – λ1)v11 − v21 = 0,
Если v11 =1, то v21 = − 0,1985
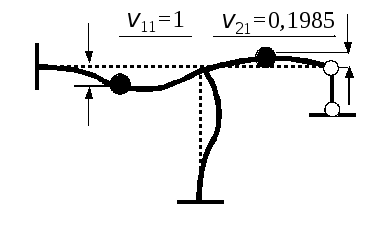
2 – я форма колебаний.
λ 2 = 3,7415.
(13,815 – λ2)v12 − v22 = 0,
Если v12 =1, то v22 = 10,0735

Вынужденные колебания








r11Z1 + R1F = 0
R1F = 42 кН∙м
Z1= − R1F / r11 = − 42/14,5i (рад)




− 5,499 J1 − 0,466 J2 + 49,38 = 0,
− 0,466 J1 − 15,998 J2 − 19,551 = 0
J1 = 9,109 кН, J2 = −1,526 кН
Mдин = M1 J1 + M2 J2 + MF





Пример 9. Построить Mдин
при
F(t)
= 6sinθt
(кН)и θ
= 0,8ωmin.


Расчетная схема при sinθt =1







− 25,312 J1 + 405 = 0
J1 = 16 кН
Mдин = M1 J1 + MF

-
Учет симметрии
в задачах
динамики



Способ группировки
Симметричные колебания




Кососимметричные колебания


Расчет симметричной части
Симметричные колебания

Кососимметричные колебания



-
Приближенные
способы определения
частот свободных колебаний
-
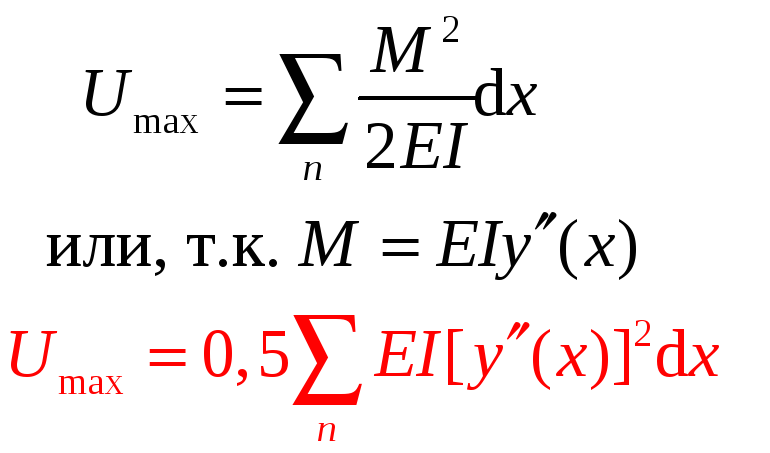
Энергетический способ
U + V = const


Umax = Vmax
y(x,t) = y(x) sin ωt






-
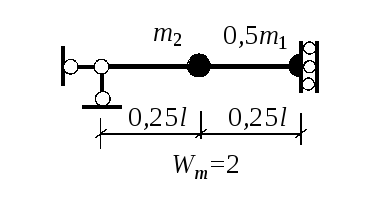
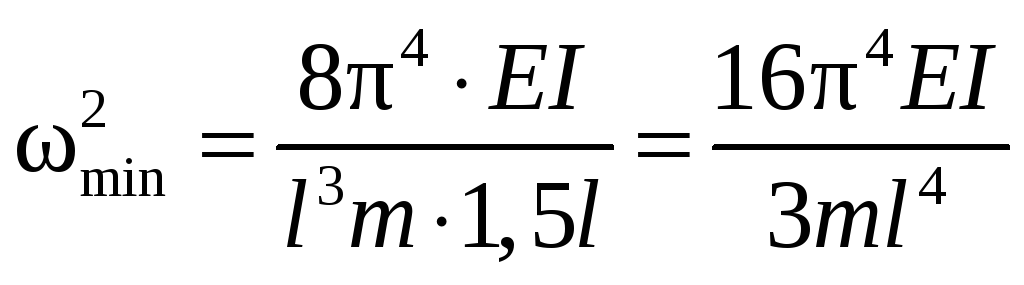
Способ приведенных масс


V=Vпр
y(x,t) = y(x) sin ωt






Способ приведенных масс





.




Энергетический способ




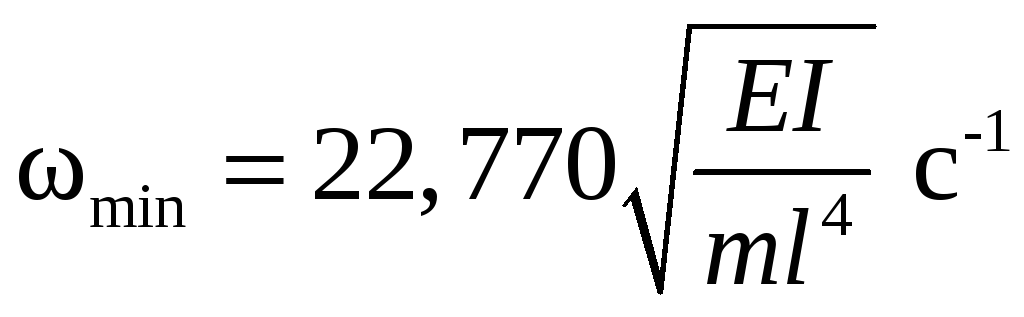 Погрешность
1,77%
Погрешность
1,77%


M(x) = 0,5qlx – 0,5qx2 – ql2/12

 Граничные
условия:
Граничные
условия:
x = 0 yꞌ = 0, откуда D1 = 0
x = 0 у = 0, откуда D2 = 0
y(x) = a(x4 – 2x3l + x2l2), где a = q/24EI
Способ приведенных масс







Энергетический способ

