

I. Программа работы
1. Ознакомление с конструкцией и паспортными данными трехфазного асинхронного двигателя.
2. Управление двигателем: пуск, изменение направления вращения, регулирование частоты вращения при заданной нагрузке.
3. Снятие характеристик n=f(I) двигателя с короткозамкнутым ротором и при различных сопротивлениях в цепи ротора.
4. Снятие механических характеристик n=f(M).
II. Общие сведения и описание установки
Асинхронные трехфазные двигатели (АД) с короткозамкнутым ротором наиболее распространены по сравнению с АД фазным ротором, так как, имея одинаковые рабочие свойства с двигателями с фазным ротором, проще, надежнее и имеют лучшие коэффициенты мощности и полезного действия. Однако они имеют худшие пусковые характеристики (большой пусковой ток) и ограниченные возможности регулирования частоты вращения. Поэтому в случаях, когда отсутствует преобразователь, но необходим управляемый пуск при питании от сети или регулирование частоты вращения путем изменения механической характеристики (двигатели малой мощности), применяются двигатели с фазным ротором.
Асинхронный двигатель типа 102.1 в режиме синхронный машины с фазным ротором состоит из неподвижной части (статора) и вращающейся (ротора). Статор представляет собой полый цилиндр из пакетов электротехнической стали, на внутренней поверхности которого имеются пазы для обмотки, параллельные оси цилиндра.
В пазах уложена в виде отдельных катушек (секций) трехфазная обмотка. Фазные обмотки смещены вдоль окружности статора на 120/pградусов (р – число пар полюсов). Начала(U1, V1, W1), концы(U2, V2, W2), и нулевой вывод (N) обмотки выведены на щиток машины и снабжены маркировкой (рис. 1.1). Обмотку статора можно легко включать звездойYили треугольником(изменяя расположение перемычек на щитке). Номинальное напряжение на фазе обмотки 127 В.

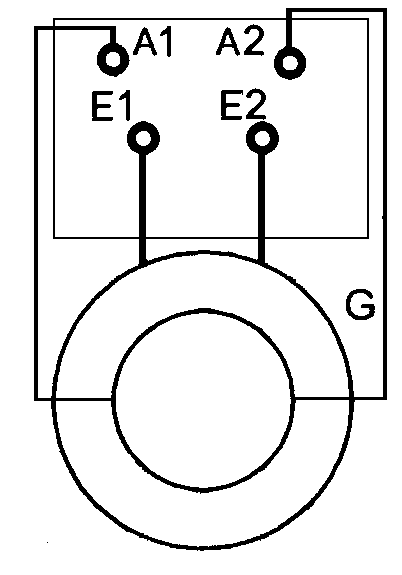
Рис. 1.1. Рис.1.2
Ротор выполняется в виде цилиндра из пакетов электротехнической стали с пазами. В пазах ротора укладывается фазная обмотка. Фазная обмотка выполняется аналогично статорной, соединяется звездой и начала фаз (Р1, Р2, Р3) выводятся на контактные кольца. Через щетки, наложенные на контактные кольца, в цепь ротора может включаться пусковой пли регулировочный реостат.
В двигателях, изготовляемых в европейских странах начала статорных и роторных обмоток обозначаются соответственно как U1, V1, W1иF1, F2, F3.
При включении обмотки статора в сеть трехфазного тока в машине возникает вращающееся магнитное поле, частота вращения которого определяется только числом пар полюсов pи частотой токаf1и называется синхронной частотой вращения
![]() . (1)
. (1)
Вращающееся магнитное поле пересекает проводники обмотки ротора и индуктирует в них ЭДС Если роторная обмотка замкнута, то возникающий в ней ток I2во взаимодействии с полем статора Ф создаст вращающий момент
![]() , (2)
, (2)
где сМ– конструктивный коэффициент;2– сдвиг по фазе между ЭДС и током ротора.
Для возникновения вращающего момента необходимо, чтобы ротор вращался с частотой, отличной от частоты вращения поля. Эта разница выражается в отношении ее к частоте вращения магнитного поля и называется скольжением
![]() . (3)
. (3)
ЭДС ротора, а следовательно токи ротора и статора, зависят от скольжения:
![]() , (4)
, (4)
![]() , (5)
, (5)
где Е2– ЭДС неподвижного ротора;R2,x2– активное и индуктивное сопротивления неподвижного ротора.
Ток статора
![]() , (6)
, (6)
где
![]() – ток неподвижного ротора, приведенный
к напряжению статора, или нагрузочная
составляющая тока статора.
– ток неподвижного ротора, приведенный
к напряжению статора, или нагрузочная
составляющая тока статора.
Изменение нагрузки на валу двигателя приводит к изменению скольжения s, ЭДС ротора, токов ротора и статора и вращающего момента.
Частота вращения двигателя из формулы (3):
![]() . (7)
. (7)
Для нормальных двигателей номинальные значения скольжения sн= 0,01…0,05, а следовательно, номинальная частота вращения близка к синхроннойnн=(0,99…0,95)n0.
Связь между вращающим моментом и скольжением определяется зависимостью
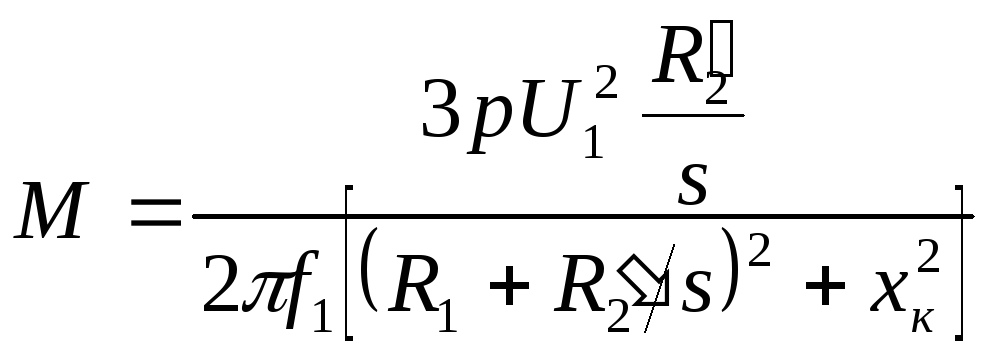 , (8)
, (8)
где R1,R2’ – активные сопротивления фазы статорной и роторной (приведенной к напряжению статора) обмоток;xк– индуктивное сопротивление короткого замыкания; U1– фазное напряжение.
График уравнения (8) приведен на рис. 1.2. Рабочий участок характеристики определяется интервалом моментов 0≤М≤Мm. Из характеристики M=f(s) могут быть определены: критическое скольжениеsкрпри М=Мm, кратность максимального моментаkm=Mm/Mн, называемая перегрузочной способностью, и кратность пускового момента kп=Mп/Mн. Величины km, kпприводятся в каталогах на асинхронные двигатели.
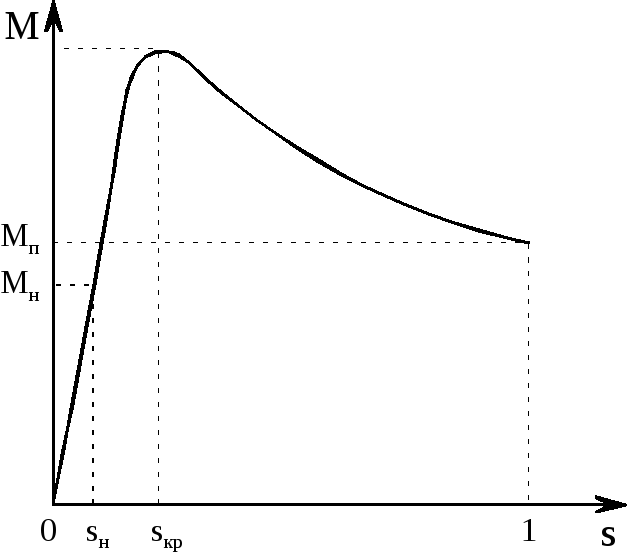
Рис. 1.2
По формуле момента в относительных единицах
 , (9)
, (9)
паспортным данным и kmможно построить характеристикуM=f(s), вычислив предварительно
![]() . (10)
. (10)
Аналогичная характеристика, построенная в координатах n=f(M), называется механической характеристикой. Характеристика приRp=0 (рис. 1.3) называется естественной.
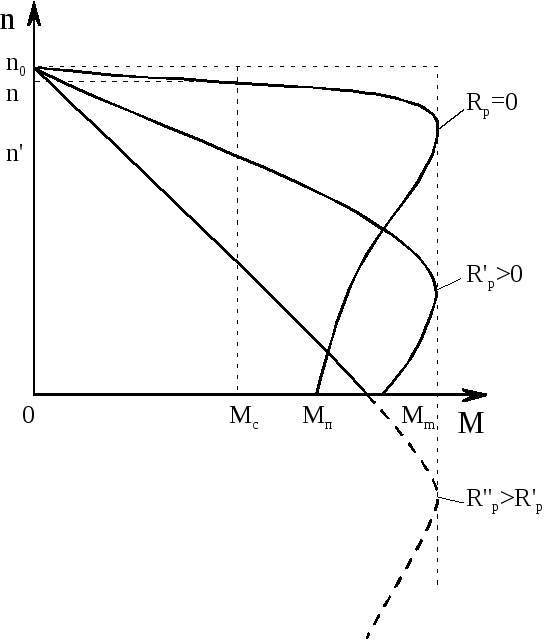
Рис.1.3
Механическая характеристика может быть получена опытным путем увеличением нагрузки двигателя. Однако при этом нужно помнить, что в интервале скольжений sн<s≤sкрток статора приближается к пусковомуIп=(4…7)Iн, оставаясь таким при скольжениях, sкр≤s≤l.
Свойства асинхронного двигателя определяются его рабочими характеристиками, т.е. зависимостью тока статора I1, потребляемой мощности P1, частоты вращенияnи скольженияs, момента М, коэффициента мощностиcos1, коэффициента полезного действияот мощности на валуP2при постоянных напряжении U1, частотеf1и замкнутом накоротко роторе. Примерный вид характеристик приведен на рис.1.4.
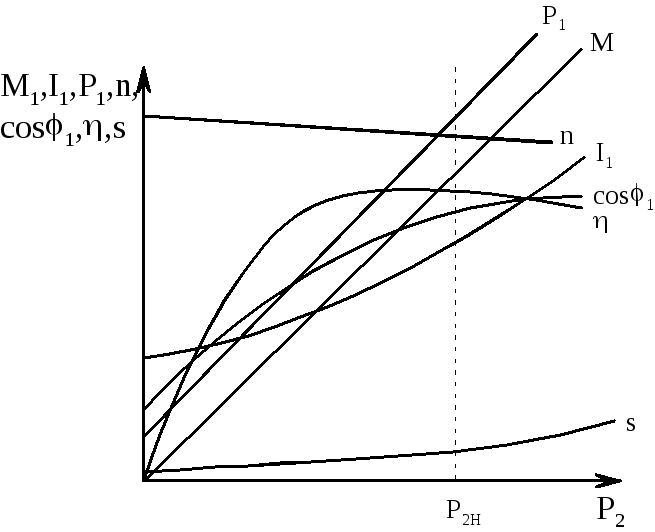
Рис. 1.4
Следует отметить зависимость I1=f(P2), по которой видно, что ток холостого хода асинхронных двигателей относительно велик (составляет (0,3…0,5)I1н), что объясняется наличием воздушного зазора в магнитной цепи машины.
Пуск асинхронного двигателя с фазным ротором производится при помощи пускового реостата Rр, включаемого в цепь ротора. Реостат позволяет уменьшить пусковой ток и увеличить пусковой момент, а также обеспечить необходимую плавность пуска.
Регулирование частоты вращения асинхронных двигателей с фазным ротором осуществляется включением активного сопротивления Rрв цепь ротора. Включение сопротивления увеличивает критическое скольжение
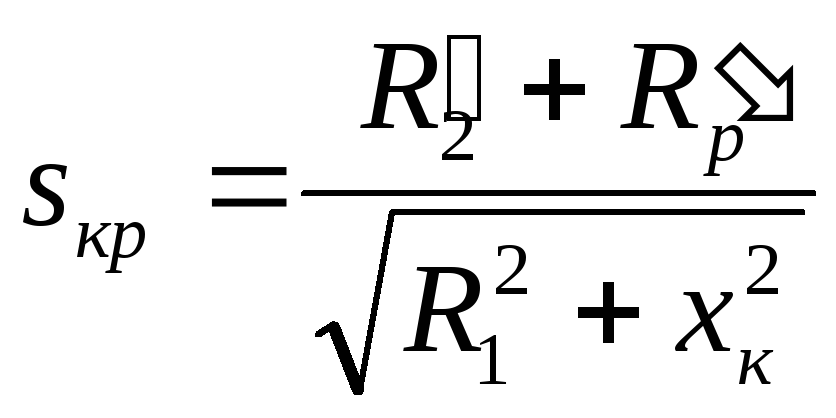 ,
,
или, пренебрегая активным сопротивлением статора R1=0,
![]() (11)
(11)
и не изменяет максимального момента, т.е. вызывает смещение механических характеристик (см. рис.1.3). Как видно из формулы (8), при постоянном моменте сопротивления Mс=constдолжно остаться неизменным соотношениеR’2/s=(R’2+R’р)/s’=const. Следовательно, скольжение s’при включении реостата увеличится пропорционально увеличению сопротивления:
![]() . (12)
. (12)
Недостаток реостатного регулирования частоты вращения – потери энергии в реостате, снижение КПД и увеличение наклона механических характеристик.
Для исследования нагрузка двигателя обычно осуществляется генератором постоянного тока с независимым возбуждением, нагружаемым на реостат Rн(рис. 1.5).

Рис. 1.5
Потребляемая асинхронным двигателем мощность
![]() , (13)
, (13)
где kТТ– коэффициент трансформации трансформаторов тока, через которые включен ваттметр; W – показания ваттметра в ваттах.
Полезная мощность вычисляется по приближенному значению КПД, которое определяется из предположения, что КПД одинаковых по мощности машин при одинаковой нагрузке примерно одинаков =Г, тогда КПД агрегата
![]() ,
,
откуда
![]() . (14)
. (14)
Полезная мощность (на валу)
![]() . (15)
. (15)
Вращающий момент в Н м
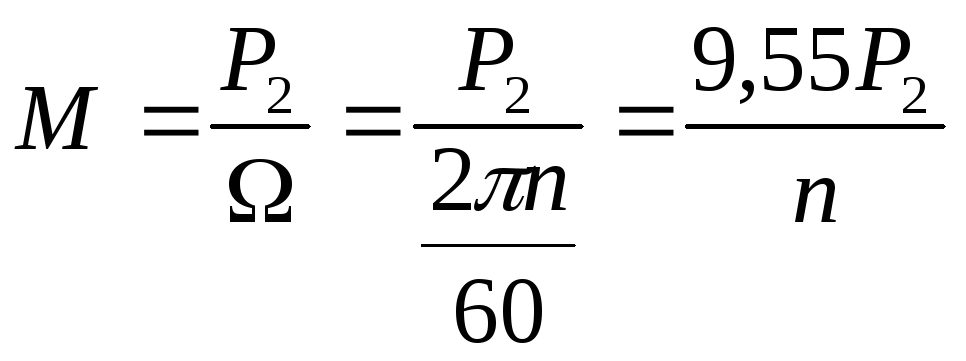 , (16)
, (16)
где – угловая частота вращения ротора;n– частота вращения, определяемая по вольтметру VТГ,n=UТГ СVтг, об/мин.
Частота тока в роторе
![]() . (17)
. (17)
Коэффициент мощности
![]() . (18)
. (18)