

8.3. Электрогидравлические и электропневматические пропорционально - интегрирующие регуляторы.
На рис. 8.За изображена схема пропорционально - интегрирующего регулятора с изодромом в цепи обратной связи. Сигнал об отклонении регулируемой величины после усиления воздействует на электромеханический преобразователь 7, смещающий струйную трубку 2 из нейтрального положения. Питание струйной трубки может осуществляться как жидкостью от гидронасоса, так и воздухом от компрессора. При этом регулятор будет соответственно либо электрогидравлическим, либо электропневматическим.
Отклонение струйной трубки вызывает движение поршня 5 исполнительного механизма со скоростью, пропорциональной отклонению регулируемой величины. Поршень изодрома 4 сместится на величину, пропорциональную скорости исполнительного механизма, и с помощью реостата обратной связи 3 сформирует сигнал обратной связи по скорости. Пропорционально-интегральный закон регулирования обычно создается за счет электрических гибких обратных связей. Того же результата можно достичь путем введения производной от сигнала в прямой тракт интегрирующего регулятора. Структурная схема регулятора приведена на рис. 8.36.

Рис. 8.3. Принципиальная (а) и структурная (б) схемы пропорционально - интегрирующего регулятора.
Применение гибкой обратной связи существенно снижает инерционность охваченных ею элементов и увеличивает быстродействие исходного интегрирующего регулятора. При обычных допущениях передаточная функция пропорционально-интегрирующего регулятора
![]()
где
![]()
В последнем случае обе составляющие сигнала - пропорциональная и интегральная, - давшие название регулятору, выступают в явном виде. Благодаря интегральной составляющей сигнала рассматриваемый регулятор обладает высокой статической точностью.
Оптимальная настройка пропорционально - интегрирующего регулятора при работе его со статическим объектом выражается следующим образом через обобщенные характеристики объекта:
К = 0,8 Т0 / (Т3К0); Ти = ЗТ3.
При экспериментальном определении коэффициента усиления регулятора ККР, соответствующего началу колебаний в системе, из соотношения К = 0,45 ККР найдется оптимальная настройка ТИ = 0,85 ТКР, где ТКР - период собственных колебаний системы.
Пропорциональный регулятор на пневматических элементах предназначен для отработки непрерывного выходного сигнала, подаваемого на исполнительный механизм для поддержания параметра на заданном значении (рис. 8.4).
Действие регулятора основано на принципе компенсации сил, при котором механические перемещения чувствительных элементов близки нулю. Вследствие этого регулятор обладает высокой чувствительностью. Сигналы от измеряемого параметра П и от задатчика номинала Н поступают на элемент сравнения 2, выходное давление РА которого изменяется в зависимости от рассогласования между П и Н. Силы, обусловленные этим рассогласованием, уравновешиваются силами, развиваемыми сигналом в линии отрицательной обратной связи, и опорным сигналом Но, задаваемым задатчиком 6.


тора,
состоящего из α3,
α4
и β2,
К
изменяется от 1 до ∞ (![]() =
100
=
100![]() 2%).
Задатчик 5
обеспечивает постоянство расхода
питания на выходе
регулятора. Выходное давление сумматора
РА
поступает
на вход
усилителя мощности 3,
а затем через выключающее реле 4
на выход
регулятора Р.
Выключающее реле служит для отключения
регулятора от линии исполнительного
механизма при подаче сигнала Рк.
На
линии входа давления РА
в усилитель 3
установлено постоянное сопротивление
2%).
Задатчик 5
обеспечивает постоянство расхода
питания на выходе
регулятора. Выходное давление сумматора
РА
поступает
на вход
усилителя мощности 3,
а затем через выключающее реле 4
на выход
регулятора Р.
Выключающее реле служит для отключения
регулятора от линии исполнительного
механизма при подаче сигнала Рк.
На
линии входа давления РА
в усилитель 3
установлено постоянное сопротивление
![]() .
Здесь и далее сопротивление
.
Здесь и далее сопротивление![]() применяется для гашения автоколебаний,
возникающих при работе регулятора.
Возможность работы регулятора с
исполнительным механизмом прямого и
обратного действия обеспечивает
переключатель1
установленный на входе регулятора.
Основная погрешность
прибора составляет ±
0,5 %.
применяется для гашения автоколебаний,
возникающих при работе регулятора.
Возможность работы регулятора с
исполнительным механизмом прямого и
обратного действия обеспечивает
переключатель1
установленный на входе регулятора.
Основная погрешность
прибора составляет ±
0,5 %.
Пропорционально-интегральный регулятор реализует закон:

где Ти - время интегрирования, настраиваемое дросселем (33 и изменяемое от 0,05 до 100 мин.
Регулятор (рис. 8) состоит из сумматора, пропорционального звена, интегрального звена, усилителя мощности и выключающего реле. Текущее значение параметра П и значение задания Н сравниваются на элементе сравнения 2 (включенного по схеме сумматора), выход которого поступает на пропорциональное и интегральное звенья. Пропорциональная составляющая воздействует на отрицательную обратную связь, а интегральная - на положительную. Каждая из обратных связей вносит соответствующую составляющую в общее регулирующее воздействие регулятора. Степень воздействия этих составляющих настраивается регулируемыми сопротивлениями β1 и β2 для пропорциональной и β3 для интегральной.
В
интегральном звене (β3
и V)
вырабатывается
интеграл
по времени от величины рассогласования
П
— Н.
В пропорциональном
звене рассогласование поступает на
дроссельный сумматор β1
и α1
с помощью которого изменяются пределы
пропорциональности
![]() от
100 до 3000 % илиК
от 1 до 0.
от
100 до 3000 % илиК
от 1 до 0.
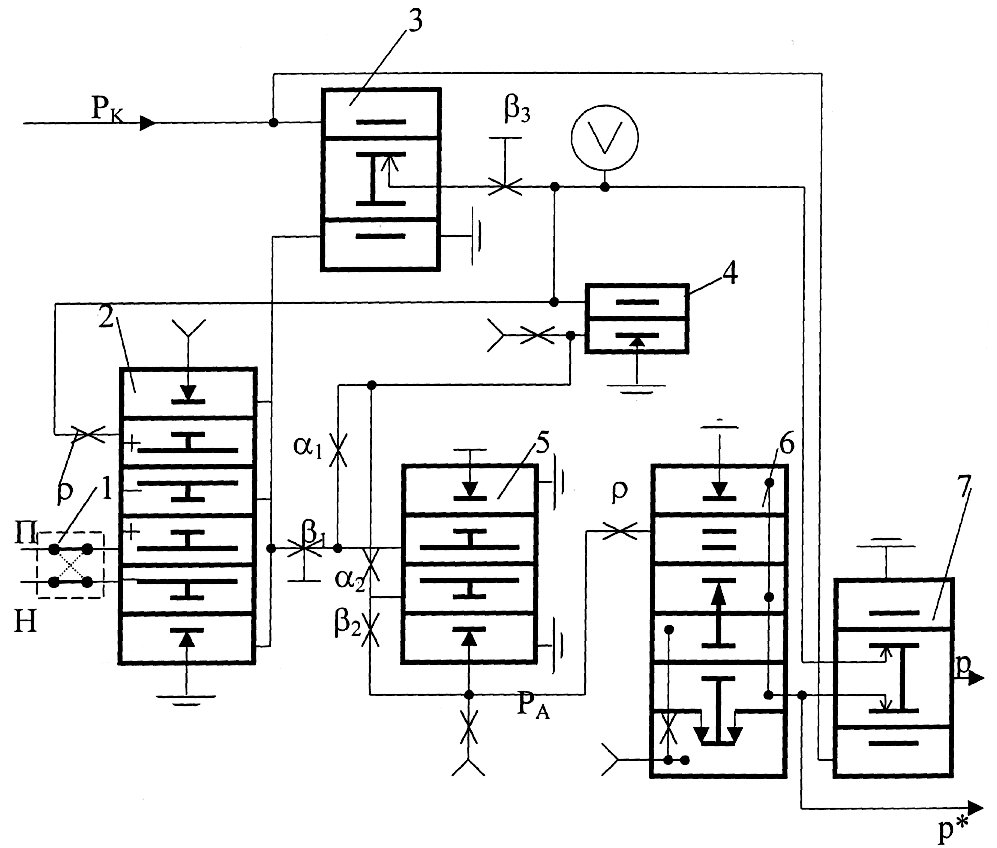
Рис. 8.5. Пропорционально - интегральный регулятор.
При
работе в этом диапазоне регулируемое
сопротивление β2
установлено
на отметку 100 %. При изменении пределов
пропорциональности
![]() от 2 до 100 % (К
от ∞ до 1) регулируемое сопротивление
β1
устанавливается
на отметку 100%, а настройка изменяется
регулируемым сопротивлением β1.
Выход РА
элемента сравнения
5
поступает на вход усилителя мощности
6,
а затем через выключающее реле 7
на
выход Р
от 2 до 100 % (К
от ∞ до 1) регулируемое сопротивление
β1
устанавливается
на отметку 100%, а настройка изменяется
регулируемым сопротивлением β1.
Выход РА
элемента сравнения
5
поступает на вход усилителя мощности
6,
а затем через выключающее реле 7
на
выход Р
регулятора и далее на исполнительный механизм. При переходе на режим ручного дистанционного управления подается команда Рк на выключающие реле 7 и 3, при этом выход регулятора Р отключается от входа на исполнительный механизм и линия интегральной составляющей прерывается. Такая реализация регулятора предохраняет линию исполнительного механизма от скачков давления при переходе с режима на режим. Повторитель 4 служит развязкой в линии интегральной составляющей.
Для возможности работы регулятора с исполнительным механизмом прямого и обратного действия предусмотрен переключатель 1.