

Розділ 3. Розрахунок основних конструктивних параметрів
3.1. Обґрунтування основних конструктивних параметрів гвинтового механізму регулювання висоти
Гвинтовий механізм регулювання висоти граблів ГУР-4,2 встановлюється на існуючий поворотний механізм граблів (з незначною його переробкою) і складається з (рис. 10):
1, 1/-опорні кронштейнів;
2, 2/- гайки;
3-гвинт.
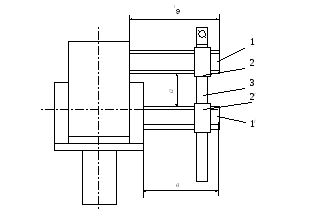
Рис. 10. Схематичне зображення механізму регулювання висоти граблів для найнижчого положення граблин
Для зменшення крутного моменту та навантаження, які діють на опорні кронштейни та на гвинт потрібно відстань а – відстань між кронштейнами у нижньому положенні граблів та відстань в – довжина опорних кронштейнів, зробити якомога меншими.
Тому з конструктивних міркування, для можливості обертати гвинт та для того, щоб зберегти основну конструкцію граблів приймаємо, відстань а = 560 мм, але різьбу нарізаємо на довжині 530 мм, в = 210 мм, а в1 = 220 мм. Приймаємо гвинт М30, та з сортаменту обираємо кронштейни з кутового профілю №5. Перевіряємо на міцність прийнятий гвинт та кронштейни.
3.2. Розрахунок на міцність деталей удосконаленого механізму регулювання висоти
Механізм регулювання висоти універсальних роторних граблів ГУР-4,2 розраховуємо у верхній точці підйому при відсутності направляючого та допоміжних болтів. Так як гвинт 3 (рис. 10) у цьому положенні має найбільшу довжину крутні моменти будуть виникати найбільші.
Побудуємо епюри крутних моментів та поперечних сил які діють на окремі частини механізму регулювання висоти.
На верхній кронштейн 1 (рис. 10) діє вага граблів G, яка дорівнює 420 кг. Ця вага діє на дві опори, тому на один піднімальний механізм діятиме сила ваги G1 = 210 кг.
У результаті дії цієї сили виникає крутний момент М1 = -G1·x1. Цей момент буде максимальним у т. В, яка найбільше віддалена від осі обертання ротора граблів.
МВ = -G1·в
Поперечна сила діє на всю довжину кронштейну однаково і дорівнює:
Q = G1.
Епюра крутних моментів та поперечних сил, які діють на верхній кронштейн зображена на рис. 11.

Рис. 11. Епюра крутних моментів та поперечних сил, які діють на верхній кронштейн механізму регулювання висоти граблин
Крутний момент МВ передається на гвинт механізму регулювання.
Цей момент М1 буде рівний по всій довжині гвинта
Поперечні сили на гвинт не діють (рис. 12).
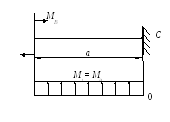
Рис. 12. Епюра крутного моменту, який діє на гвинт механізму регулювання висоти граблин.
Крутний момент і поперечні сили, які діють на нижній кронштейн будуть аналогічні моменту та силі, які діють на гвинт механізму регулювання (рис. 13).
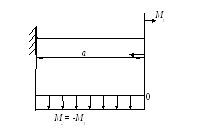
Рис. 13. Епюра крутних моментів та поперечних сил, які діють на нижній кронштейн механізму регулювання висоти граблин
Таким чином ми бачимо, що найбільш навантаженим є точка В (рис. 11) верхнього кронштейну, гвинт (рис. 12) та нижній кронштейн (рис. 13), тому розрахунок ведемо по крутному моменту цих ділянок механізму.
Крутний момент у т. В верхнього кронштейну та по всій довжині нижнього буде дорівнювати:
МВ = М2 = G1·в = 210 кг.с·0,21 м = 44,1 кг.с·м = 432,2 Н·м.
Крутний момент, який діє на гвинт дорівнює також 432,2 Н·м.
З умови міцності на згин:
max=Mmax/Wy знаходимо Wy, який є геометричною характеристикою перерізу
[]=200 мПа=200·106Па=200·106Н/м2;
Мmax=432,2 Н·м;
Wy=432,2 / 200·106 = 2,16·10-6 м3=2,16 см3;
З одержаних даних бачимо, що обраний гвинт М30 та кутник №5 підходять для використання у вдосконаленому механізмі.