

Лабораторная работа №4. Методы фильтрации цифровых изображений
Цель работы
Закрепление теоретических сведений о методах борьбы с шумами и помехами на изображении; свойствах низкочастотных и высокочастотных, линейных и нелинейных фильтров; приобретение умения и навыков технической реализации математических моделей указанных фильтров и исследования их статистических характеристик.
Основные сведения о методах фильтрации изображений
Как при приеме одномерных радиотехнических сигналов, так и при анализе изображений основным средством преодоления действия шумов и искажений, вносимых аппаратурой, является фильтрация. Для изображений различают линейный и нелинейный виды фильтрации, а двумерность изображений позволяет осуществлять фильтрацию как во временной, так и в пространственной области.
Временная фильтрация изображений
Временная фильтрация -
это один из наиболее эффективных методов
снижения заметности шумов для изображений,
представленных последовательностью
кадров и сюжет которых не изменяется
во времени. Типовой операцией временной
фильтрации является накопление
кадров. При накоплении
каждый элемент результирующего
изображения
![]() образуется суммированием
и осреднением элементов с такими же
пространственными координатами в
образуется суммированием
и осреднением элементов с такими же
пространственными координатами в
![]() кадрах
кадрах
![]() следующих во времени с
периодом
следующих во времени с
периодом
![]() :
:
![]() . (4.3)
. (4.3)
Если шумовые составляющие
яркости в соседних кадрах являются
статистически независимыми, то
среднеквадратическое отклонение
яркостного шума в результате такой
обработки снижается в
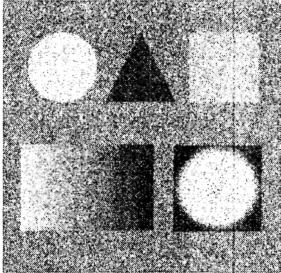
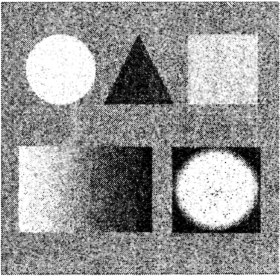
![]() раз. На рис. 4.5
приведены кадр сильно зашумленного
тестового изображения и результаты
накопления пяти и десяти независимых
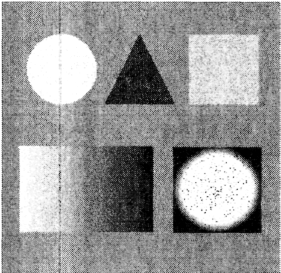
кадров соответственно. При неограниченном
времени наблюдения с помощью накопления
кадров можно получить (теоретически)
полное подавление любого яркостного
шума.
раз. На рис. 4.5
приведены кадр сильно зашумленного
тестового изображения и результаты
накопления пяти и десяти независимых
кадров соответственно. При неограниченном
времени наблюдения с помощью накопления
кадров можно получить (теоретически)
полное подавление любого яркостного
шума.
Однако в реальных условиях время наблюдения обычно ограничено динамикой сюжета изображения или жесткими ограничениями на время анализа изображений. Поэтому на практике удается накопить всего лишь от одного до десяти кадров изображения. Если при этом отношение сигнал-шум остается недостаточно высоким, то временную обработку дополняют пространственной фильтрацией.
Линейная пространственная фильтрация изображений
Линейная пространственная
фильтрация изображений
заключается в осреднении с соответствующими
весовыми коэффициентами различных
элементов одного и того же кадра
изображения
![]() в соответствии с
выражением для двумерной дискретной
свертки [3,20]:
в соответствии с
выражением для двумерной дискретной
свертки [3,20]:
![]() , (4.4)
, (4.4)
где
![]() -поле (матрица)
коэффициентов импульсной
характеристики пространственного
фильтра.
-поле (матрица)
коэффициентов импульсной
характеристики пространственного
фильтра.
а) б) в)
Рис. 4.5. Временная фильтрация изображений:
а) отдельный кадр на входе временного фильтра;
б) результат накопления пяти кадров;
в) результат накопления десяти кадров
Согласованная пространственная фильтрация
Если матрица коэффициентов фильтра согласована с эталонным изображением интересующего объекта, то говорят о согласованной пространственной фильтрации. Ее основными свойствами являются максимально возможное выходное отношение сигнал-шум и формирование меры схожести произвольного фрагмента наблюдаемого изображения с эталонным. Эти свойства обуславливают применение согласованной пространственной фильтрации для вычисления достаточной статистики принятия решений в системах распознавания изображений. Однако неинвариантность коэффициентов фильтра к повороту и масштабу изображения ограничивает их применение в современных системах обработки изображений из-за резкого увеличения трудоемкости вычислений при неизвестной угловой ориентации и масштабе.
Примеры линейных фильтров
Благодаря простоте организации и невысокой трудоемкости вычислений, большее распространение получили фильтры с ограниченной прямоугольной апертурой (окном, описывающим область с ненулевыми коэффициентами импульсной характеристики фильтра). Выражение для откликов таких фильтров удобно записать в виде, полученном заменой переменных в выражении (4.4):
![]() , (4.5)
, (4.5)
где
![]() и
и![]() - размеры апертуры
фильтра. В этом случае фильтрация
осуществляется пошаговым перемещением
окна фильтра на один элемент изображения.
При каждом положении окна производится
перемножение весовых множителей с
соответствующими значениями яркостей
исходного изображения и суммирование
полученных результатов.
- размеры апертуры
фильтра. В этом случае фильтрация
осуществляется пошаговым перемещением
окна фильтра на один элемент изображения.
При каждом положении окна производится
перемножение весовых множителей с
соответствующими значениями яркостей
исходного изображения и суммирование
полученных результатов.
Размеры апертуры фильтра берутся нечетными, чтобы центральный элемент окна определялся однозначно. Наиболее употребимые размеры апертуры фильтров 3x3 и 5x5 пикселов [19,20,23].
Сочетание значений коэффициентов фильтров определяет свойства результирующего изображения. Если все коэффициенты в окне фильтра положительные, то происходит сглаживание перепадов яркости - расфокусировка результирующего изображения (рис. 4.6). В частотной интерпретации такие фильтры являются пространственными фильтрами нижних частот. Самым простым в этом классе можно считать фильтр скользящего среднего, где все коэффициенты в окне равны между собой:
 .
.
Эффективность подавления шумов таким фильтром приблизительно такая же как и у накопления кадров, однако это достигается снижением разрешающей способности изображения.
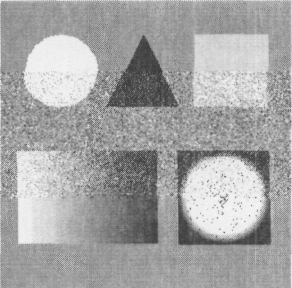

а) б)
Рис. 4.6. Низкочастотная пространственная фильтрация изображений: а) исходное тестовое изображение с зашумленной полосой в центре; б) результат линейной низкочастотной пространственной фильтрации
Противоположными свойствами обладают пространственные фильтры верхних частот. Они имеют коэффициенты разных знаков и обеспечивают подчеркивание перепадов яркости (рис. 4.7). Типовые наборы весовых множителей таких фильтров следующие [23]:
 ,
, ,
, .
.
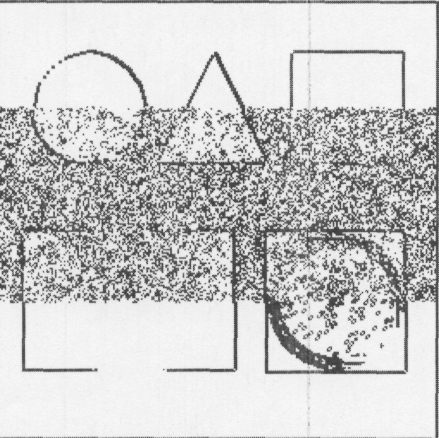
Рис. 4.7. Результат высокочастотной пространственной фильтрации тестового изображения
Особенностью фильтрации полей точек (например, изображений звездного неба) является возможность исключить из вычислений все ситуации, соответствующие расположению апертуры фильтра в области фона с нулевой яркостью. В этом случае результирующее изображение представляется как суперпозиция откликов фильтра на дельта-импульсы, расположенные в точечных отметках [20]:
![]() , (4.6)
, (4.6)
где
![]() ,
,![]() ,
,![]() - соответственно номер,
яркость и координаты точечной отметки.
- соответственно номер,
яркость и координаты точечной отметки.
Нелинейная пространственная фильтрация
Процесс нелинейной фильтрации изображений во многом схож с линейной фильтрацией. Основное отличие заключается в том. что выход нелинейного фильтра формируется нелинейным преобразованием данных исходного изображения. Примерами нелинейных фильтров являются медианный фильтр, семейство процентильных фильтров, дифференциальные фильтры Собела и Кирша, масочные операторы [20,21,23].
Сущность работы медианного фильтра заключается в том, что каждый элемент выходного изображения равен медиане данных исходного изображения, находящихся в апертуре. Полезным свойством медианных фильтров является то, что они не искажают ступенчатые и линейно-изменяющиеся перепады яркости, а также обеспечивают полное подавление точечных (импульсных) помех (рис.4.8).
Если выходу фильтра
присваивать не значение медианы данных,
а значение любой
![]() -ой
(
-ой
(![]() ,
,![]() - площадь
окна фильтра в пикселах) порядковой
статистики, то можно получить
- площадь
окна фильтра в пикселах) порядковой
статистики, то можно получить ![]() так называемых
процентильных фильтров. Одним из важных
свойств процентильных фильтров является
либо уменьшение размеров объектов,
находящихся на изображении (это
достигается при
так называемых
процентильных фильтров. Одним из важных
свойств процентильных фильтров является
либо уменьшение размеров объектов,
находящихся на изображении (это
достигается при ![]() ),
либо их увеличение (
),
либо их увеличение (![]() ).
).
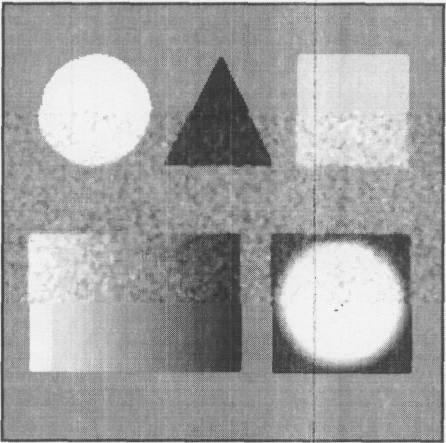
Рис. 4.8. Результат медианной фильтрации тестового изображения
Дифференциальные и масочные фильтры
Указанные фильтры основаны на различных аппроксимациях величины градиента яркости в точках изображения и служат для выделения границ изображений объектов. В этой связи они близки к линейным высокочастотным фильтрам.
К использованию дифференциальных и высокочастотных фильтров следует подходить осторожно, т.к. они подчеркивают как полезные, так и шумовые перепады яркости. При очень слабом шуме в исходном изображении общее снижение отношения сигнал/шум в отфильтрованном изображении визуально замечается слабо. Однако, уже при средней зашумленности исходного кадра в результирующем изображении полезные перепады маскируются ложными, причем в такой степени, что даже такой мощный распознающий инструмент как человеческий глаз проще решает эту задачу по исходному изображению.
Достаточно подробный обзор известных линейных и нелинейных фильтров приведен в работах [20,23,26], где можно более детально ознакомиться с их свойствами и особенностями построения.
Задание. Порядок выполнения
Сформировать в среде MathCAD тестовое черно-белое изображение, содержащее плавно изменяющиеся перепады яркости, однородные по яркости объекты с резкими границами, контрастные по отношению к фону, множество контрастных к фону точечных объектов (имитаторов импульсных помех).
Выполнить аддитивное зашумление каждого элемента изображения нормальным случайным процессом с нулевым математическим ожиданием и заданной дисперсией.
Выполнить линейную высокочастотную фильтрацию изображений.
Выполнить линейную низкочастотную фильтрацию изображений.
Выполнить нелинейную процентильную фильтрацию изображений с различным рангом выходной статистики.
Оценить СКО шума в результирующих изображениях.
Оценить степень и характер подавления импульсных шумов (точечных объектов) полученными фильтрами.
Дать количественную и визуальную оценки ухудшения (улучшения) качества изображений после того или иного вида фильтрации.
Определить чем отличаются результаты процентильной фильтрации, полученные при различных рангах выходной статистики.
Сделать рекомендации по использованию фильтров.
Требования к содержанию отчетов
Титульный лист;
Цель работы;
Задание;
Основные теоретические сведения;
Методика выполнения работы;
Результаты работы;
Текст программы в среде MathCAD;
Выводы с анализом основных результатов.