

Способы получения оценки параметра принятого сигнала по методу сравнения
…или полуавтоматическим методом.

Пик
выходного сигнала сравнивается с порогом
обнаружения Uп. Чаще всего
это сравнение осуществляется визуально,
с помощью индикаторов на ЭЛТ. Координаты
максимума функции находятся визуально по экрану индикатора
по нанесенной на него шкале. При
обнаружении сигнала шкала не требуется,
а при измерении параметров она обязательна.
Без шкалы измерение любой физической
величины в принципе невозможно.
Полуавтоматический метод измерения и
обнаружения позволяет одновременно
обнаружить и измерить координаты
нескольких целей.
находятся визуально по экрану индикатора
по нанесенной на него шкале. При
обнаружении сигнала шкала не требуется,
а при измерении параметров она обязательна.
Без шкалы измерение любой физической
величины в принципе невозможно.
Полуавтоматический метод измерения и
обнаружения позволяет одновременно
обнаружить и измерить координаты
нескольких целей.

Определение разрешающей способности и интервала разрешения рл по дальности.
Разрешающая
способность измерителя-обнаружителя
– способность его к обнаружению
одновременно нескольких целей и
раздельному измерению их координат.
Сигналы от 2х одинаковых целей при
отсутствии помех будут наблюдаться
раздельно, если еще наблюдаются их пики
или вершины (не сливаются). Мерой
разрешающей способности РЛ по данному
параметру является разность точек
максимума, при которой сигналы сливаются
в один. Эта разность примерно равна
 ,
ширине выходного сигнала ПРМ по данному
параметру.
,
ширине выходного сигнала ПРМ по данному
параметру.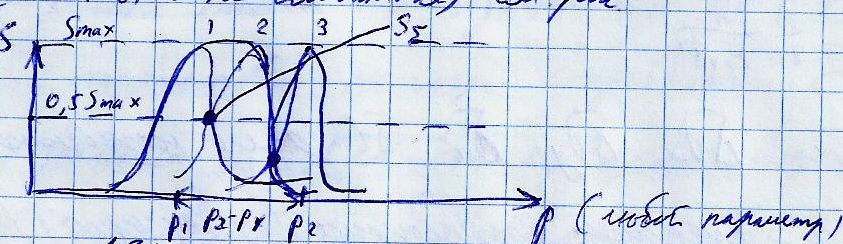
В соответствии с принципами РЛ, интервалы разрешения РЛокатора по дальности рассчитываются следующим образом:

Определение разрешающей способности и интервалов разрешения рл по угловым координатам
Разрешающая способность – способность о-и к обнаружению одновременно нескольких целей и разделению их координат.
Интервал
разрешения по параметру ( )
– разница координат точек максимума,
при которых сигналы не сливаются в один.
Данная разница примерно равна
)
– разница координат точек максимума,
при которых сигналы не сливаются в один.
Данная разница примерно равна ширине входного сигнала по данному
параметру
ширине входного сигнала по данному
параметру
Интервалы разрешения по угловым координатам:


Определение разрешающей способности и интервала разрешения РЛ по скорости
Разрешающая способность – способность о-и к обнаружению одновременно нескольких целей и разделению их координат.
Интервал
разрешения по параметру ( )
– разница координат точек максимума,
при которых сигналы не сливаются в один.
Данная разница примерно равна
)
– разница координат точек максимума,
при которых сигналы не сливаются в один.
Данная разница примерно равна ширине входного сигнала по данному
параметру
ширине входного сигнала по данному
параметру
Интервал разрешения по скорости:
СКП радиолокатора при измерении дальности
СКП
– средне квадратичная погрешность -


 - СКП при измерении дальности
- СКП при измерении дальности
 -
ширина спектра сигнала
-
ширина спектра сигнала
СКП радиолокатора при измерении угловых координат
СКП
– средне квадратичная погрешность -


 - СКП при измерении угловых координат
- СКП при измерении угловых координат
СКП радиолокатора при измерении радиальной скорости
СКП
– средне квадратичная погрешность -


 -
СКП по дальности
-
СКП по дальности
 -
ширина спектра сигнала
-
ширина спектра сигнала
Принцип действия обзорного импульсного РЛ по его структурной схеме

Синхронизатор предназначен для задания временного режима работы функциональных устройств радиолокатора (включает и выключает в определенное время, задает период следования излучаемых радиоимпульсов). Передатчик генерирует мощные высокочастотные электрические р/импульсы. Структурно представляет собой некогерентный передатчик:

Передатчик работает с требуемыми периодом, длительностью и частотой и импульсной мощностью. Период задается синхронизатором, длительность импульса - модулятором, частота и мощность – ГВЧ.
РЛ работает циклически или периодически.
АП предназначен для подключения антенны к ПРД на время излучения и подключения к ПРМ в оставшееся время периода. Антенна предназначена для излучения мощных высоко частотных электро-магнитных радиоимпульсов, и для приема отраженных от цели э-магн радиоимпульсов и их преобразования в электрический сигнал.