

ПособиеМПЭВС_ч2
.pdf4.3 Режимы микропроцессорных систем |
121 |
В системе с внеинтерфейсным вектором могут быть реализованы разные алгоритмы установления очереди в общем контроллере, который выставляет вектор устройства в соответствии с настройкой очереди.
Организация прерываний с программным опросом готовности предполагает наличие в памяти МПС подпрограмм обслуживания прерываний от всех внешних устройств. Приоритет запросов однозначно определяется порядком, установленным для них в подпрограмме обработки прерываний.
Варианты организации аппаратных средств многоуровневых систем прерываний для циклических, пространственных и программно определяемых очередей и сведения по типовому контроллеру прерываний 580ВН59 (аналог контроллера прерывания i8259) рассматриваются в приложении К папки электронных материалов к пособию.
4.3.5 Прямой доступ к ресурсам
Под прямым доступом (ПД) понимается согласованное бесконфликтное отключение МПК от внешних ресурсов. При магистральных линиях соединений это перевод в третье состояние адресных, информационных, управляющих магистралей. В радиальных и каскадных структурах соединений это блокируемые мультиплексоры по каждой группе линий. Условия согласованного блокирования (или отключения) рассмотрены в разделе 3 пособия. Вариант отключения магистралей с шинными формирователями дан в материале Приложения Г папки электронных материалов к пособию. Модуль мультиплексора MX для переключения одной из магистралей радиальных и каскадных соединений показан на рисунке 4.22.
Рис. 4.22 – Управляемый переключатель сигнальных линий
Кмоменту выдачи сигнала HLDA МПУ завершает свои внешние операции
сресурсом, разрешает выполнять операции претенденту. Сигнал HLDA выставляется одновременно к переключателю MX и претенденту на ресурс. Адресный, информационный или управляющий поток от претендента на ресурс может выставляться на линиях A2 после того, как поток с линий A1 будет заблокирован. Хозяином ресурса и претендентом на ресурс могут быть устройства одного ранга, например многопроцессорный комплекс с общей памятью или с общими периферийными средствами. Взаимодействие таких комплексов на уровне структуры обсуждалось в первом разделе пособия безотносительно к технической реализации. В организации взаимодействия устройств одного ранга должны решаться вопросы диспетчеризации доступа к обобществляемому ресурсу. Если захваченный ресурс
122 |
Глава 4. Микроконтроллеры и микропроцессорные системы |
предполагается использовать с той же дисциплиной доступа, что применялась хозяином, то позитивной чертой ПД является сокращение задержки в переходе на обслуживание запроса в сравнении с применением режима прерываний и реализация удобного способа блокировки одного процесса другим. Применением режима ПД к устройствам разного ранга может быть достигнут существенный выигрыш по временным показателям обмена.
Примером организации ПД может служить применение аппаратного контроллера прямого доступа к памяти 580ВТ57 (аналог контроллера i8257). В этом контроллере, который размещается между источником данных и памятью для их записи (или, наоборот, между памятью и приёмником считываемых данных), предусматривается аппаратный счётчик инкремента (декремента) адреса памяти и формирователь пары управляющих сигналов: чтение (запись) к памяти и запись (чтение) к источнику или приёмнику данных. Такие контроллеры актуальны для управления транспортом данных от быстрых источников в память (или из памяти к приёмникам), минуя МПК. Сведения по программируемому контроллеру прерываний 580ВТ57 приведены в приложении Л папки электронных материалов к пособию.
4.4 Специализированные аппаратные средства МК и МПС
4.4.1 Состав специализированных аппаратных средств
Микроконтроллеры и микропроцессорные системы призваны расширить возможности и удобства для человека на пути пользования зрением, слухом, осязанием, обонянием, вкусом. Три первых органа чувств широко эксплуатируются техническими средствами МПК и МПС, и тем не менее типовые решения по применению технических средств по этим направлениям в разных сочетаниях остаются актуальными. Среди многообразия задач, решаемых техническими средствами МПК и МПС, выделяются: контроль времени, преобразование формы сигналов, контроль и измерение параметров сигналов, контроль и идентификация устройств тактильного ввода сообщений, визуальное отображение информации и состояний. Управление и контроль состояний технических средств по названным направлениям организуется применением программного режима по прерываниям, а по необходимости, и режима ПД. Контроль и идентификация устройств тактильного ввода сообщений и визуальное отображение информации и состояний, так или иначе, базируются на использовании параллельных портов (регистры и шинные формирователи) с учетом специфики их подключения к датчикам и ячейкам визуализации. Особая роль отводится средствам контроля времени (таймерам) и средствам взаимодействия с непрерывными во времени сигналами. Специализированными средствами МПС являются преобразователи форм сигнала «амплитуда — цифровой код» (АЦП) и «цифровой код — амплитуда» (ЦАП). Сервисными к преобразователям являются ключевые переключатели непрерывных сигналов (аналоговые коммутаторы) и композиции этих коммутаторов с накопителями заряда (емкостные схемы аналоговой выборки-хранения). Коммутаторы управляются дискретно через параллельные порты ввода-вывода, и, несмотря на уникальность свойств для ана-

4.4 Специализированные аппаратные средства МК и МПС |
123 |
логовых сигналов для МК, они являются своеобразными цифровыми датчиками, которые через параллельный порт надо включить либо выключить. Для комментария выделены средства контроля времени и преобразователи АЦП и ЦАП.
4.4.2 Средства контроля времени. Таймеры
Применяются два подхода к контролю времени. В одном из них используются электронные часы абсолютного, а в другом — относительного времени. Под абсолютным понимается время, контролируемое вне процессов МПК и МПС. Частным его вариантом может быть астрономическое время. Под относительным понимается время, отсчитываемое относительно внутренних событий управления МПК или МПС. При ориентации на часы абсолютного времени осуществляется контроль времени, соответствующего этапам управляемого процесса, а применение часов относительного времени направлено на инициирование выполнения этапов процесса по контрольным временным этапам. Применение часов относительного времени освобождает управляющее устройство от слежения за временем, и этот вариант наиболее распространён в построении МПС, функционирование которых связано с учётом фактора времени. Электронные часы относительного времени через систему прерываний «напоминают» процессору о текущем времени. Такие часы получили наименование таймеров.
Вариант относительного контроля времени программной реализацией временных пауз, циклическими повторами команд также применяется, когда паузы являются неотъемлемой частью некоторого алгоритма, незначительны по отношению длительности исполнения программы и не препятствуют исполнению совокупности иных параллельно выполняемых программ.
В качестве электронных часов относительного времени применяются аппаратные программируемые таймеры. Примером программируемого таймера может быть таймер модели 580ВИ53, аналог таймера i8253. Таймеры, встроенные в однокристальные микроЭВМ разных модификаций, в значительной мере повторяют внешние свойства, характерные для i8253. На рисунке 4.23 представлена модель таймера 580ВИ53 с исключением двух из трёх каналов и, соответственно, исключением ряда атрибутов в программной модели.
Рис. 4.23 – Условное обозначение одноканального таймера

124 |
Глава 4. Микроконтроллеры и микропроцессорные системы |
Полагая, что условное обозначение на рисунке 4.23 соответствует программно настраиваемому вычитающему счётчику формата два байта, с разрешением счёта импульсов со входа CLK либо сигналом на входе GATE, либо после загрузки счётчика, допустимой может быть программная модель таймера, приведенная на рисунке 4.24. В программной модели таймер представляется тремя регистрами. Один регистр формата один байт соответствует регистру настройки режима. Два других регистра соединены в пару и образуют вычитающий счётчик формата два байта. Для адресного выбора трёх регистров предусмотрено два адреса.
Рис. 4.24 – Программная модель модифицированного таймера
Один адрес назначен для выбора регистра режима, а другой адрес является общим для регистров вычитающего счётчика, но выбор регистров счётчика предполагается связанным с установкой слова режима, подобно тому, как это сделано в таймере 580ВИ53. Полагая, что аппаратные ресурсы модифицированного таймера обеспечивают такую поддержку, форматом слова режима в соответствии с рисунком 4.24 установлены три разных поля: двухбитовое поле RL формата загрузки счётчика, трёхбитовое поле режима Mi выходного сигнала OUT и однобитовое поле BCD системы счёта.
В работе с таймером первым загружается слово режима. Адрес загрузки условно принимается со значениями (A0 = 0) & (/CS = 0). Поле RL0, RL1 в слове режима позволяет управлять загрузкой регистров счетчика.
Один адрес со значением (A0 = 1) & (/CS = 0) с учетом установленного кода
вполе RL позволяет на аппаратном уровне обеспечить последовательность загрузки двух байт в счётчик таймера. Возможны три варианта настройки последовательности загрузки счётчика: только старшего байта, только младшего байта, и при работе с двумя байтами по умолчанию полагается порядок загрузки или чтения по очереди — сначала младший, а потом старший байт. Слово режима может загружаться в любое время работы с таймером. Загрузкой слова режима с форматом xx00xxxx по адресу (A0 = 0) & (/CS = 0) вводится режим «фиксация», который, подобно таймерам модели i8253, позволяет двумя обращениями по адресу доступа (A0 = 0) & (/CS = 0) выполнить чтение сначала младшего, а потом старшего байта текущего состояния счётчика таймера. Можно допустить, что режимы, кодируемые полем M0, M1, M2, и спецификация реакции на внешний сигнал GATE
вмодифицированном таймере те же, что в модели i8253. Так, режим P0 соответствует программируемой задержке, и при загрузке режима P0 устанавливается
4.4 Специализированные аппаратные средства МК и МПС |
125 |
уровень выхода OUT = 0, который сохраняется при загрузке счётчика и установке GATE = 1. Состояние OUT = 1 устанавливается по завершению счёта. Установка сигнала GATE = 0 в процессе приостанавливает счёт, и продолжается счёт при GATE = 1. Удобен этот режим для работы с прерываниями. Режим P1 соответствует программируемому одновибратору, генерирующему импульс низкого уровня длительностью N тактов, перезапускаемому разным фронтом на входе GATE. Режим P2 — это генератор программируемой частоты, с разрешением счёта входом GATE. Генерируется выходной периодический сигнал OUT = 1 длительностью N −1 тактов и OUT = 0 длительностью один такт. Счёт инициируется с начального значения при установке GATE = 1. Установка режима без загрузки счётчика сохраняет OUT = 1 до загрузки счётчика, чем обеспечивает программный запуск. Режим P3 по входу GATE аналогичен, но генерирует меандр с положительным импульсом от запуска длительностью N/2 или (N + 1)/2 тактов. Режим P4 генерирует одиночный строб с программным запуском. Счёт инициируется с разрешённым входом GATE по загрузке N (программный запуск). На выходе по окончании счёта генерируется отрицательный импульс длительностью один такт. Режим P5 генерирует импульс, подобный режиму P4 с аппаратным перезапуском. Цепь опроса состояния выхода OUT в модифицированном таймере, как и модели i8253, не предусмотрена. Направления использования выходного сигнала не регламентированы, и выходной сигнал OUT до следующей загрузки режима может опрашиваться как сигнал готовности, а может применяться как сигнал запроса прерываний.
Установка бита в поле BCD = 0 позволяет выполнять счёт до 65536 тактов с внешнего входа CLK, а при BCD = 1 — до 9999.
4.4.3 Преобразователь цифрового кода в амплитуду
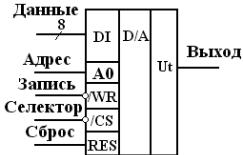
Функциональный модуль цифроаналогового преобразователя ЦАП (DAC — Digit Analog Converter) для применения в МК показан на рисунке 4.25. Программная модель преобразователя приведена на рисунке 4.26 и состоит из трёх регистров формата один байт. Формат слова приказа настройки приведен на рисунке программной модели. Полагается, что аппаратные ресурсы ЦАП, приведенного на рисунке 4.25, поддерживают заявленные в программной модели атрибуты настройки. Состав атрибутов программной модели показывает, что на аппаратном уровне обеспечены два варианта полной амплитуды выходного напряжения (2,5 В и 5 В).
Рис. 4.25 – Условное обозначение одноканального ЦАП

126 |
Глава 4. Микроконтроллеры и микропроцессорные системы |
Два состояния адресной линии A0 определяют две модификации регистров загрузки (регистр настройки и регистр данных). Состояние адресной линии A0 = 0 соответствует загрузке слова приказа настройки, а при A0 = 1 загружаются данные.
Так как регистр данных представлен двумя словами в дополнительном коде, то программной модели должен соответствовать скрытый на аппаратном уровне (теневой) способ загрузки двух байтов данных под общим адресом (A0 = 1)& &(/CS = 0) фиксированной последовательностью (например, по спецификации сначала младший, затем старший байт с изменением выходного напряжения после загрузки старшего байта).
Рис. 4.26 – Программная модель варианта ЦАП
Иные настройки ЦАП не предусмотрены, и генерация форм изменения непрерывного сигнала на выходе такого ЦАП полностью ложится на программное сопровождение его в приложениях. Как функциональный объект программируемых микроэлектронных средств, ЦАП характеризуются параметрами, часть которых определяется атрибутами, указанными на программной модели. Это допустимый диапазон амплитуды (2,5 В, 5 В), полярность выходного напряжения, минимальный размер дискреты, минимальное время установления уровня выходного сигнала. Размер дискреты зависит от разрядности преобразуемого кода и амплитуды выходного напряжения. Время установления зависит от схемных решений исполнения разрядных сумматоров. Применяются варианты суммирования напряжений на токовых матрицах и на ОУС. Токовые сумматоры на порядок сокращают длительность переходных процессов в сравнении с суммированием разрядных напряжений на ОУС. Время установления, как и прочие параметры ЦАП (энергопотребление, нагрузочная способность, входные и выходные сопротивления, стабильность, чувствительность), определяется спецификацией прибора. Работа с ЦАП предусматривает подготовку и загрузку слова настройки амплитуды по адресу (A0 = 0)& &(/CS = 0) и последовательную загрузку сначала младшего, а затем старшего байта данных в дополнительном коде по адресу (A0 = 1) & (/CS = 0). Подобный подход применяется к иным модификациям ЦАП компонентного и встроенного в МК исполнения.
4.4.4 Преобразователь амплитуды в цифровой код
Функциональный модуль преобразователя амплитуды в код (АЦП) показан на рисунке 4.27.
Преобразование может выполняться по разным алгоритмам, с разным составом технических средств поддержки. Структурно АЦП содержит формирователь

4.4 Специализированные аппаратные средства МК и МПС |
127 |
Рис. 4.27 – Условное обозначение одноканального АЦП
уравновешивающего опорного напряжения, аналоговую схему сравнения опорного напряжения с преобразуемым в код входным напряжением, цифровую схему фиксации числового результата и, в зависимости от способа преобразования, узлы синхронизации процесса преобразования. От алгоритма приближения уравновешивающего напряжения к преобразуемому зависит время получения цифрового эквивалента (время преобразования). По виду алгоритма приближения различают преобразователи: последовательного приближения, поразрядного уравновешивания, параллельного считывания, с двойным интегрированием. Обозначение, показанное на рисунке 4.27, не зависит от алгоритма приближения. Процесс преобразования по времени связывается с внешним сигналом Start (Запуск преобразования). По завершению преобразования устанавливается активный уровень сигнала /RDY (готовность, низкий на рисунке 4.27).
Адресные сигналы /CS (Выбор кристалла) и A0 необходимы для указания места преобразователя в адресном пространстве при программном доступе. Управляющие сигналы /IOW (Запись в порт) и /IOR (Чтение порта) инициируют операции при программном управлении запуском преобразования и считыванием цифрового результата преобразования, соответствующего уровню входного сигнала Ut соответственно.
На рисунке 4.28 приведена программная модель, как один из вариантов отражения технических ресурсов АЦП. Полагается, что аппаратные ресурсы АЦП, приведенного на рисунке 4.27, поддерживают заявленные в программной модели атрибуты настройки.
Рис. 4.28 – Программная модель варианта АЦП
Состоянию адресной линии (A0 = 0) & (/CS = 0) соответствует загрузка или чтение слова приказа настройки, а при (A0 = 1) & (/CS = 0) считываются данные в зависимости от состояния бита поля RL. Формат цифровых данных, соответствующих преобразуемому уровню, как и в ЦАП, принят с запасом, равным двум машинным словам. Для их сохранения в модель включены два регистра данных (ADCDH
128 |
Глава 4. Микроконтроллеры и микропроцессорные системы |
иADCDL) форматом по одному байту каждый и предусмотрено два обращения для их считывания по одному адресу (A0 = 1) & (/CS = 0). Состояние RL = 0 соответствует условию считывания одного байта данных при числе дискретных уровней до 256. Состояние RL=1 соответствует считыванию младшего, а затем старшего байта данных при числе дискретных уровней до 65536. В программной модели, согласно рисунку 4.28, отражены такие технические возможности аппаратных ресурсов АЦП, которые позволяют установить два уровня амплитудного значения A входного напряжения (2,5 В и 5 В), выполнить аппаратный и программный запуск преобразования установкой бита RUN, контролировать программно состояние бита RDY и аппаратно применять этот сигнал для прерываний. Как функциональный объект программируемых микроэлектронных средств, АЦП характеризуется допустимым диапазоном амплитуды входного сигнала (размах непрерывного сигнала на входе АЦП), разрешением входного непрерывного сигнала на разряд цифрового кода, временем преобразования входного сигнала Ut. Выбор модификации АЦП по времени преобразования АЦП согласуется со скоростью изменения сигнала Ut таким образом, чтобы за время однократного преобразования изменение Ut не превысило один квант (A/2n, где A — амплитуда, а n — разрядность кода). Прочие параметры АЦП (энергопотребление, нагрузочная способность, входные
ивыходные сопротивления, стабильность, чувствительность) для задач управления не являются определяющими, хотя являются актуальными для микроконтроллерных приборных приложений. Работа с АЦП рассматриваемой версии ресурсов
ипрограммной модели заключается в исполнении последовательности действий:
•подготавливается приказ настройки со значениями битовых позиций A и RL и загружается в АЦП по адресу (A0 = 0) & (/CS = 0);
•формируется внешний сигнал *Пуск запуска АЦП или подготавливается приказ настройки со значением бита RUN=1 и загружается в АЦП с адресом (A0 = 0) & (/CS = 0);
•проверяется состояние бита RDY считыванием из регистра настройки (или выполняется переход на обслуживание прерывания по состоянию выхода /RDY) с адресом (A0 = 0) & (/CS = 0);
•при активном состоянии бита /RDY или сигнала на выходе /RDY в зависимости от установленного бита RL выполняется однократное (или двух кратное) обращение считывания данных с адресом (A0 = 1) & (/CS = 0).
Совместно с преобразователями применяются масштабирующие усилители, аналоговые переключатели, схемы аналоговой выборки и буферного хранения. Все названные функциональные узлы (модули) являются объектами изучения и проектирования в смежных дисциплинах. Для микроконтроллерной техники эти модули представляют интерес, как составные части комплексов, где они должны быть встроены в АЦП и согласованы с программными моделями для процесса программного обслуживания. Поэтому важны внешние описания перечисленных модулей и те их параметры, атрибуты которых должны учитываться в организационных структурах МК и МПС.
4.4 Специализированные аппаратные средства МК и МПС |
129 |
4.4.5 Средства контроля параметров цепей и состояния режимов
Сигналы разной физической природы при подготовке к вводу в МПУ и контроллеры через УСО неизбежно преобразуются в электрическую форму. Электрическая форма сигнала на элементарных промежутках времени характеризуется режимными параметрами: напряжением, током, мощностью. Режимные параметры изменяются во времени и характеризуются скоростью изменения, формой временных зависимостей. По форме зависимости от времени выделяются две группы сигналов: непрерывная форма и прерывистая. Непрерывные и прерывистые сигналы в процессе наблюдения могут быть определены как периодические и непериодические. Непрерывные непериодические сигналы характеризуются минимальным и максимальным значениями на временном интервале наблюдения и максимальной скоростью изменения на этом интервале, определяемой непрерывной первой производной df (t)/dt. Распространённой формой непрерывного периодического сигнала являются синусоидальный сигнал и сумма синусоидальных сигналов. Периодические непрерывные сигналы характеризуются периодом повторения и смещением (фазой) относительно условных точек отсчёта во времени. Для прерывистых сигналов производная df (t)/dt не является непрерывной функцией на рассматриваемом интервале (имеет разрывы). Прерывистые сигналы определяются как импульсные и характеризуются амплитудой, длительностями фронтов переключения, формой и длительностью «плоских» вершин и «впадин». Периодические импульсные последовательности сигналов дополнительно характеризуются периодом повторения. Распространённой разновидностью импульсных сигналов являются цифровые непериодические и периодические сигналы. Их отличительной чертой является постоянство амплитудного значения и постоянство отсчётных уровней, низкого и высокого для напряжений или токов. Один из уровней определяется как уровень логической единицы, а другой — как уровень логического нуля.
Форма электрических сигналов во времени определяется как условно постоянная, когда за время наблюдения изменения сигнала пренебрежимо малы, и как переменная, когда изменения значительны и подлежат учёту.
Режимные параметры в электрических и электронных приборах неразрывно связаны элементами электрических цепей. Контроль режимных параметров и параметров элементов, в разных условиях эксплуатации, в разных процессах является одной из важнейших сфер творческой деятельности исследователей и проектировщиков.
Микроконтроллерные средства в этой сфере позволяют радикально улучшить показатели контрольной аппаратуры, повышая точность, оперативность контроля, обеспечивая накопление, систематизацию результатов, реализуя недоступную при ручном управлении синхронизацию контрольных функций. Для режимных параметров актуальными являются:
•измерение и регулирование напряжений и токов;
•измерение мощностей приборов, контроль стабильности;
•измерение токов, напряжений приборов и контроль стабильности;
•измерение периодов и частот сигналов и контроль стабильности;
•измерение длительностей фронтов и контроль стабильности;

130Глава 4. Микроконтроллеры и микропроцессорные системы
•измерение фазовых смещений и задержек и контроль стабильности;
•измерение сопротивлений элементов цепей и контроль стабильности;
•измерение и контроль стабильности емкостей элементов цепей;
•измерение индуктивностей элементов цепей и контроль стабильности;
•измерение потерь в элементах цепей и контроль стабильности.
Результатами контроля перечисленных режимных параметров и параметров элементов цепей обеспечивается расширение спектра и ресурсов технических средств. Задачи такого взаимодействия актуальны и в части энергосбережения, и в части ресурсосбережения, и в части контроля состояния и охраны здоровья человека, и в части контроля состояния и охраны окружающей среды.
4.5 Однокристальные микроЭВМ
4.5.1 Общие сведения
Модификации однокристальных микроЭВМ (ОМЭВМ), как развитие МПК шинного варианта со встроенными параллельными портами и памятью программ и память данных на одном кристалле с процессором, хронологически получили распространение с задержкой относительно шинной модели. Расширение состава портов процессора для внутреннего применения открыло доступ в состав однокристальной структуры технических средств, которые до этого соответствовали электронным аналогам периферийных устройств. Это в первую очередь таймеры, широтно-импульсные преобразователи (ШИП) и измерители временных параметров сигналов. Позднее перечень этих электронных узлов и устройств был дополнен аналоговыми компараторами, с последующим расширением состава устройств до ЦАП и АЦП, широтно-импульсных модуляторов (ШИМ). С середины 70-х годов 20-го века направление ОМЭВМ стало настолько привлекательным и востребованным, что в разработку, совершенствование конструкций, параметров и производство включилось множество фирм. Перечень идей по расширению состава новых приборов на кристалле на современных технологиях продолжает расширяться. В пособии для первичного ознакомления предпочтение отдано МП ОМЭВМ i8051 [6], которая стала классическим образцом перехода от шинных процессоров к устройствам, которые шины «спрятали в себе», но, по необходимости, допускают шинную структуру внешних связей в доступе к памяти и портам внешнего окружения.
4.5.2 Структурная организация ОМЭВМ 1816ВЕ51
Структурная схема ОМЭВМ 1816ВЕ51, аналог i8051, приведена на рисунке 4.29. В состав ОМЭВМ включены устройство управления, синхронизации, операционный блок, память регистров общего назначения (РОНы), совмещеная с регистровой оперативной памятью ОМЭВМ.
Особенностью организации РОНов ОМЭВМ является наличие под общими регистровыми адресами R0–R7 четырёх банков (Банк0–Банк3) размером по восемь