

Автоматизация Аржанников Б.А
.pdfДругой особенностью работы трансформатора является наличие в цепи регулировочной обмотки трансформатора и УР циркулирующего тока, определяемого из уравнения
Iц |
= |
|
kαU10 |
|
. |
(3.3) |
kρ |
(Z α + Z p |
|
||||
|
|
+ Z p2 ) |
|
|||
|
|
|
1 |
|
|
|
Циркулирующий ток имеет индуктивный характер и увеличивает намагничивающий ток трансформатора на величину
|
|
|
|
|
I ′ |
= |
|
kα |
I |
|
|
|
|
||
|
|
|
|
|
|
|
ц |
|
|
|
|||||
|
|
|
|
|
|
ц |
|
|
kρ |
|
|
|
|
||
и равен |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
I |
|
= I |
|
− I ′ , |
|
|
(3.4) |
||||||
|
|
|
|
|
mρ |
oρ |
|
|
|||||||
где |
|
|
|
|
|
|
|
|
|
ц |
|
|
|
||
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ρ |
|
|
|
|
|
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Ioρ = |
βo |
|
αo |
, |
Z oρ = |
|
kρ |
Z o , |
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Z oρ |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k1 |
|||
k = |
ωα + ωβ |
, |
Z — коэффициент трансформации и полное со- |
||||||||||||
|
|||||||||||||||
1 |
ω2 |
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
противление намагничивающей ветви трансформатора с полным числом витков ωα + ωβ при отключенных УР.
Третьей особенностью трансформатора является то, что он имеет переменное внутреннее сопротивление, приведенное к числу витков вторичной обмотки
Z т = |
1 |
|
− ρ)Z ρ2 |
|
+ Z 2 . |
(3.5) |
|
||||||
k2 |
Z β + (1 |
|
||||
|
ρ |
|
|
|
|
|
В формулах (3.1) и (3.5) принято: Zα и Zβ — полное сопротивление регулировочной и нерегулируемой частей сетевой обмотки, Z2 — полное сопротивление вентильной обмотки.
Вторичное напряжение трансформатора при увеличении тока нагрузки определяется из соотношения
i |
2 = i |
20 − Z т I2. |
(3.6) |
21

Преобразователь с плавным бесконтакным регулированием напряжения, осуществляемым по схеме на рис.3.1, а, в пределах регулировочной зоны, (рис.3.2, а) позволяет получить внешние автоматические характеристики с различным уровнем стабилизации. Установлено, что одна и та же автоматическая характеристика может быть получена при различных соотношениях значений токов управления управляемых реакторов. Вид характеристик определяется функциональной зависимостью токов управления от напряжения питающей сети, тока нагрузки преобразователя и реализуется системой автоматической стабилизации напряжения тяговой подстанции (АСНТп). Из множества этих зависимостей необходимо определить оптимальную. За критерий оптимальности может быть принят коэффициент мощности агрегата, так как он в большей степени, чем другие показатели (статическая точность регулирования, длительность переходного процесса, мощность управления и т. д.), зависит от режима намагничивания реакторов. Следовательно, для заданной автоматической характеристики необходимо определить величины и соотношение токов управления с целью получения наибольших значений коэффициента мощности на всем диапазоне изменения нагрузки преобразователя.
Коэффициент мощности преобразователя при наличии полу- проводни-кового выпрямителя, большой катодной индуктивности определяется следующим уравнением:
μ = F1Cosϕ1(1), |
(3.7) |
где F1 = I1(1)/I1; ϕ1(1) = α + 2 3 γ, ,
F1 — коэффициент искажения формы кривой сетевого тока I1, вносимый выпрямителем,
I1(1) — основная гармоника сетевого тока,
ϕ1(1) — угол сдвига между основной гармоникой сетевого тока и напряжением питающей сети,
α, γ — углы задержки и коммутации тока вентилей коммутирующих фаз вентильной обмотки трансформатора.
Угол задержки появляется при регулировании напряжения с помощью управляемых полупроводниковых устройств. Известно, что в первом режиме работы вентилей выпрямителя, характеризуемого наибольшим значением коэффициента мощности, угол коммутации изменяется от 0 до 60 электрических градусов. Этот режим находится в диапазоне
22

0 ≤ |
Id xa |
≤ 1,225, |
(3.8) |
|
mE2
определяемом уравнением
Cosγ = 1− Id xa ,
mE2
где Id — среднее значение выпрямленного тока,
Е2 — действующее значение фазной ЭДС вентильной обмотки, ха — реактивное сопротивление цепи коммутации,
m — число пульсаций выпрямленного напряжения.
В отличие от обычного преобразователя, в котором сопротивление ха остается неизменным, в рассматриваемом преобразователе его величина зависит от степени намагничивания управляемых реакторов и определяется из выражения
xa = |
1 |
|
|
+ x2 , |
(3.9) |
|
k |
2 |
xβ |
+ (1− ρ)xρ2 + xc |
|||
|
ρ |
|
|
|
|
|
где хβ — реактивное сопротивление нерегулируемой части сетевой обмотки,
х2 — реактивное сопротивление вентильной обмотки, хρ2 — реактивное сопротивление УР2, хс — реактивное сопротивление питающей сети.
Выпрямленное напряжение преобразователя после подстановки формул (3.4, 3.9) в известное аналитическое выражение внешней характеристики приводится к виду
U |
|
= |
kв |
{U |
1 |
− I |
|
[x |
|
− (1− ρ)x |
ρ2 |
]} − k I |
|
x |
|
− |
U |
|
− |
U |
|
, |
(3.10) |
d |
|
mρ |
c |
d |
a |
R |
B |
||||||||||||||||
|
|
kρ |
|
|
|
cx |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
UR, UВ — падение напряжения в активных сопротивлениях |
|||||||||||||||||||||
схемы и в вентилях, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
kв, kсх — коэффициенты, определяемые схемой выпрямления. Таким образом, угол коммутации вентилей, выпрямленное напряжение и коэффициент мощности преобразователя зависят от
подмагничивания реакторов.
Из формул (3.7–3.10) следует, что максимальный коэффициент мощности преобразователя с регулированием выпрямленного
23
напряжения управляемыми реакторами имеет место при минимальных значениях сопротивления (1− ρ)xρ2 .
Экспериментальные исследования реальных преобразователей с трансформаторами ТДПУ-20000/10 (35) и ТДП-16000/10
среакторами РТДП-6300/10 (35) показывают, что с уменьшени-
ем (1− ρ)xρ2 при малых нагрузках преобразователя наблюдается снижение косинуса фи. Такое снижение вызвано увеличением потерь реактивной мощности за счет наличия в контуре регули-
ровочной обмотки и УР циркулирующего тока Iц.
Чем меньше сумма сопротивлений хр1 + хр2, тем больше намагничивающий ток трансформатора и тем меньше косинус фи. Снижение косинуса фи имеет место также у преобразователей
странсформаторами обычной конструкции. Максимальное значение косинуса фи у таких трансформаторов наблюдается при нагрузках 0,3–0,5 от номинальной и снижается относительно этого максимума как при уменьшении, так и при увеличении тока нагрузки преобразователя. С ростом нагрузки преобразователя косинус фи снижается из-за возрастания угла коммутации. Для рассматриваемого преобразователя наибольший косинус фи
обеспечивается значениями сопротивлений хр1, хр2, при которых намагничивающий ток и угол коммутации минимальны. В первом режиме работы вентилей косинус фи будет наибольшим при максимальном значении (хр1 + хр2) и одновременно минимальной ве-
−ρ)xρ2 .
Расчет оптимального по косинусу фи закона управления позволил при сохранении первого режима работы вентилей преобразователя установить следующую реализацию оптимального управления:
1.В режиме холостого хода реакторы УР1 и УР2 практически размагничены и на управление затрачивается минимальная мощность. По мере роста тока нагрузки реактор УР2 намагничивается, а ток управления УР1 изменяется незначительно.
2.Регулирование напряжения осуществляется подмагничиванием реактора УР2, а роль УР1 сводится в основном к ограничению циркулирующего тока, что позволило заменить его на неуправляемый реактор НР1 (прил. П.2).
На рис. 3.1, б приведена принципиальная схема бесконтактного РПН трансформатора с помощью управляемого и неуправляемого реакторов, для которой соответствуют принцип действия
иосновные соотношения (3.1−3.6) схемы на рис. 3.1, а.
24
Лекция 4
Система автоматической стабилизации напряжения тяговой подстанции (АСНТп)
Обеспечение высокой точности регулирования напряжения преобразовательных тяговых агрегатов связано, как следует из 1.2, со снижением потерь электрической энергии от «уравнительных токов» в контактной сети между смежными тяговыми подстанциями.
Решение этой задачи рассмотрим на примерах непрерывных систем автоматического регулирования с использованием элементов электромагнитной логики и дискретных систем на базе интегральных микросхем.
Разомкнутая САР с введением в систему тока нагрузки и напряжения питающей сети, реализованная на базе регулятора ШАУН1, тягового трансформатора ТДРУ-20000/35 и реактора РТДП6300/35 позволила получить в процессе эксплуатационных испытаний погрешность (снижение точности) регулирования до ± 1,5 %.
Непрерывная замкнутая по выходному напряжению на базе шкафов ШАУН2, ШАУНЗ, тяговых трансформаторов с нулевой (ТДПУ-20000/10) и трехфазной мостовой (ТДП-16000/10) шестипульсовыми схемами выпрямления, реактором РТДП-6300/10 обеспечила снижение погрешности регулирования до ±1 %.
На рис. 4.1 представлены два варианта регулирующего органа при построении системы АСНТп. По первому варианту регулирование напряжения тягового трансформатора осуществляется двумя управляемыми реакторами УРI-УР2, включенными в отводы регулировочной части первичной обмотки трансформатора (рис. 4.1, а).
Автоматический регулятор Р — шкаф автоматического управления напряжением ШАУНЗ (Приложение П.2) осуществляет изменение токов управления реакторов с учетом оптимального по коэффициенту мощности алгоритма управления. При изменении подмагничивания магнитопроводов осуществляется плавное бесконтактное изменение выпрямленного напряжения в пределах регулировочной зоны между естественными внешними характеристиками I и 2 (рис. 3.2, а), соответствующим предельным режимам намагничивания реакторов. В качестве усилителей мощности применены магнитные усилители.
25

Рис. 4.1. Развернутая функциональная схема преобразовательного агрегата с автоматическим регулированием напряжения
а— с управляемыми реакторами УР1-УР2;
б— с неуправляемым НР1 и управляемым УР2 реакторами
По второму варианту регулирование напряжения осуществляется несимметричным реактором (неуправляемый реактор HРI — управляемый реактор УР2). При этом упрощается функциональная схема регулятора путем исключения усилителя мощности УМI (рис. 4.1, а). Упрощение схемы управления достигается в этом варианте обеспечением постоянного сопротивления реактора НР1 для стабилизированных характеристик вида 7−10 (рис. 3.2).
С целью снижения потерь электрической энергии на собственные нужды, повышения быстродействия шкафа управления ШАУН и повышения точности регулирования напряжения одним или несколькими параллельно работающими полупроводниковыми преобразователями был разработан и исследован в условиях эксплуатации шкаф управления ШАУН4 на базе непрерывной логической схемы шкафа ШАУН3 с выходным тиристорным мостом (рис. 4.2). Блок импульсного управления обеспечивает возможность работы в ручном и автоматическом режимах с фор-
26
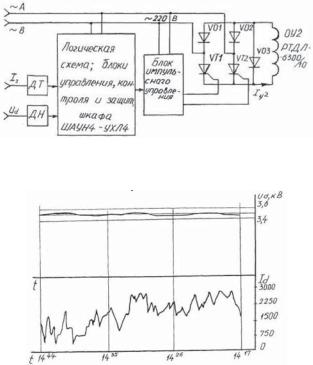
мированием пачки положительных импульсов частотой 4 кГц и длительностью импульса 20−30 мкс. Угол импульсного регулирования лежит в пределах от 0 до 180 электрических градусов. Управляющий сигнал на блок управления поступает с выхода логической схемы шкафа ШАУН4.
Рис. 4.2. Структурная схема шкафа ШАУН4 с тиристорным выходным усилительным блоком
Рис. 4.3. Копии лент регистрирующих приборов напряжения Ud и тока Id тяговой подстанции
На рис. 4.3 представлены копии лент регистрирующих приборов напряжения и тока полупроводникового преобразователя в режиме стабилизации напряжения на уровне 3500 В. Погрешность стабилизации напряжения при изменении тока нагрузки от 700 до 3000 А составляет не более ± 1 %.
С целью дальнейшего повышения статической точности регулирования напряжения, снижения энерго- и металлоемкости регулятора осуществлен переход от непрерывных (на базе элек-
27

тромагнитных и полупроводниковых элементов) к дискретным (цифровым) принципам построения системы регулирования.
Произведена замена логической схемы шкафа управления ШАУН4 непрерывного действия на логический блок на базе цифровой полупроводниковой техники — интегральных микросхем. Шкаф ШАУН5 с использованием цифровой логики и выходного тиристорного моста обеспечивает стабилизацию напряжения на шинах 3,3 кВ на заданном уровне с минимальной погрешностью
± 0,6 % при изменении напряжения питающей сети от 10 до 11 кВ и тока нагрузки от 200 до 3100 А.
Применение цифровой техники определило высокую точность, помехозащищенность и возможность реализации более сложного закона управления системы.
Функциональная схема системы электроснабжения с использованием на тяговых подстанциях системы автоматической стабилизации напряжения АСНТп представлена на рис. 4.4.
Рис. 4.4. Функциональная схема системы электроснабжения с устройствами стабилизации напряжения на тяговых подстанциях
Стабилизация напряжения на выходных шинах тяговых подстанций с помощью системы АСНТп (рис. 4.4) компенсирует потери напряжения на внутреннем сопротивлении подстанции, на сопротивлении питающей сети и повышает напряжение в контактной сети фидерных зон. Повышение на тяговых подстанциях уровня стабилизации напряжения, применяемое для компенсации потерь напряжения в контактной сети от тяговой подстанции до электровоза, работающего в режиме тяги, снижает эффективность применения на электровозах рекуперативного торможения.
28

Лекция 5
Система автоматического регулирования напряжения в контактной сети «Сирена»
От качества напряжения в контактной сети, как известно, зависит обеспечение надежной и экономичной эксплуатационной работы электроподвижного состава и в целом системы электроснабжения. Напряжение на токоприемнике электровозов при условии обеспечения проектируемых размеров движения при заданных скоростях и массах поездов на практике значительно отличается от оптимального (номинального) значения за счет потерь напряжения в контактной сети от шин тяговой подстанции до токоприемника электровозов.
Поэтому для повышения напряжения в контактной сети в тяговом режиме работы электровозов и для обеспечения эффективности электрического торможения в режиме рекуперации необходимо изменение напряжения непосредственно в контактной сети, с помощью устройств регулирования напряжения тяговых подстанций. Для этого разработано «зонное» регулирования напряжения в контактной сети.
Рис. 5.1. Структурная схема системы электроснабжения с использованием устройства регулирования напряжения «Сирена»
«Зонное» регулирование обеспечивает на одной или на нескольких фидерных зонах непрерывное и одновременное для всех фидерных зон регулирование напряжения в контактной сети. Разработанная на основе «зонного» регулирования система автоматического регулирования напряжения в контактной
29

сети «Сирена» (рис. 5.1) включает систему АСНТп, аппаратуру передачи и приема информации о напряжении на фидерных зонах (устройство телеизмерения ТИ) и блок цифрового регулятора ЦР. Основной задачей системы «Сирена» является улучшение качества напряжения в контактной сети в тяговом режиме работы электровозов с обеспечением эффективного электрического торможения в режиме рекуперации.
Учитывая, что на зоне питания может находиться не один электровоз и поддержание постоянного напряжения на токоприемниках всех электровозов практически и теоретически неосуществимо, система «Сирена» обеспечивает регулирование напряжения в контактной сети в зоне наибольшего понижения напряжения, например около поста секционирования, за счет изменения уровня напряжения на шинах тяговых подстанций.
Рис. 5.2. Функциональная схема системы «Сирена»
30