

Агаханян Електронные устройства в медицинских приборах 2010
.pdfветствующий коэффициент усиления K, получают приведенные ко
входу значения |
отклонения нуля Uвх.от = |
Uвых |
и его дрейф |
|||
K |
||||||
|
Uвых.др |
|
|
|||
Uвх.др = |
. Такой подход облегчает сравнение усиливаемо- |
|||||
K |
|
|||||
|
|
|
|
|
||
го сигнала с отклонением от нуля и дрейфом.
Отклонение Uвх.от определяется [4] приведенным к входу напряжением смещения Uвх.см, входным током смещения Iвх.см, входным током сдвига Iвх.сд и коэффициентом влияния нестабильности питающих напряжений Kвл.ип. Дрейф отклонения выходного напряжения, приведенный ко входу Uвх.др, определяется температурны-
ми коэффициентами основных параметров ИОУ: |
Uвх.см , |
Iвх.см , |
|||
|
Iвх.сд |
|
Т |
|
Т |
|
и дрейфом напряжений источников питания ± |
Еип . |
|
||
|
Т |
|
|||
|
|
|
Т |
|
|
Следует иметь в виду, что при регистрации электрокардиограмм отклонение выходного напряжения Uвых.от и в особенности его дрейф Uвых.др могут приводить к существенным ошибкам при диагностике, так как Uвых.от и Uвых.др влияют на постоянство нулевой линии, от которой производится отсчет амплитуды зубцов [2]. При этом, если влияние Uвых.от можно устранить балансировкой, то дрейф Uвых.др – только исключив изменение температуры.
Интерес представляют параметры, характеризующие операционный усилитель как усилитель постоянных сигналов. Эти параметры имеют следующие значения:
коэффициент подавления синфазных помех Fсф = 60÷120 дБ;
входной ток смещения Iвх.см = (0,1÷500) нА;
входной ток сдвига нуля Iвх.сд = (0,01÷50) нА;
приведенное ко входу напряжение смещения нуля Uвх.см =
=(0,5÷20) мВ;
коэффициент влияния нестабильности источников питания
Kвл.и.п = (5÷60) мВ/В;
температурный дрейф входного тока сдвига |
Iвх.сд |
= |
Т
= (0,01÷30) нА/оС;
101

температурный дрейф напряжения смещения |
Uвх.см = |
|
Т |
= (5÷50) мкВ/оС.
Если в усилителе предусмотрена периодическая установка нуля, то при расчетах принимается Uвх.от = 0 и определяется только дрейф выходного напряжения, приведенный ко входу.
В качестве усилителей постоянных сигналов интегральные операционные усилители применяются для усиления биотоков (в энцефалографах, электрокардиографах), фототоков, сигналов от полупроводниковых датчиков ионизирующего излучения и т.д. Заданный коэффициент усиления Kи обеспечивают охватом отрица-
тельной обратной связью [1] с глубиной F = Kис .
Kи
3.3.3.Усилители постоянных сигналов
спреобразованием сигнала
Усилители с преобразованием сигнала применяются для усиления сигналов микровольтового диапазона.
На рис. 3.6 была показана упрощенная структурная схема усилителя с преобразованием сигнала. В этой схеме модулятор и демодулятор представлены в виде идеальных ключевых элементов (К1 и К2), которые периодически замыкаются и размыкаются. Сигнал с выхода модулятора поступает на вход усилителя переменных сигналов, схема замещения которого показана в виде четырехполюсника со входным (Rвх), выходным (Rвых) сопротивлениями и источником с напряжением холостого хода Uх.х. Демодуляция сигналов производится при помощи ключевого элемента К2 и фильтра
RфСф.
На рис. 3.7 приведены эпюры напряжений, иллюстрирующие работу усилителя с преобразованием сигнала. В усилителе о преобразованием сигнала сначала преобразуют входной сигнал в переменный сигнал так, чтобы огибающая переменного сигнала совпадала с усиливаемым сигналом (см. Uг на рис. 3.7).
102
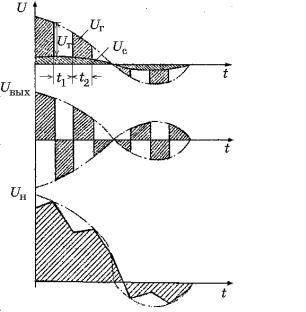
Таким образом, при помощи модулятора производят преобразование усиливаемого сигнала в переменный сигнал. Последний усиливают усилителем переменных сигналов (Uвых) и после этого при помощи демодулятора осуществляют обратное преобразование сигнала (Uг), т.е. выделение огибающей усиленного переменного сигнала (Uн). Огибающая же представляет усиленный входной сигнал, и отпадает необходимость применения усилителя прямого усиления со свойственными ему некоторыми недостатками.
Дрейф усилителя с преобразованием сигнала в значительной степени определяется характеристиками модулятора. В настоящее время наибольшее распространение получили электромеханические, электронные и реактивные модуляторы и демодуляторы.
Рис. 3.7. Эпюры напряжений, иллюстрирующие работу МДМ-усилителей
Электромеханические модуляторы и демодуляторы – виб-
ропреобразователи. В большинстве случаев используют спецвибропреобразователи – поляризованные реле, отличающиеся высокой износостойкостью контактов, малым временем их пролета, высокой стабильностью временных характеристик и малой разностью
103
потенциалов между контактами, которые обычно для этого изготавливаются из серебра, а иногда и из платино-иридиевого сплава и золота. Применяются также вращающиеся переключатели. Дрейф усилителя с преобразованием определяется дрейфом разности потенциалов контактов, которая может меняться не только из-за временного дрейфа, но и из-за возникновения термоЭДС, вызываемой местным нагревом контактов из-за трения. При соответствующем выборе материалов величину термоЭДС удается снизить до ~0,1 мкВ/град, что позволяет уменьшить дрейф до сотых долей микровольта. В обычных условиях дрейф составляет единицы микровольта.
Недостатки – потребление сравнительно большой мощности, создающей большие помехи, меньшая допустимая частота переключения, что сужает полосу пропускания усилителя в области высших частот. Наличие в вибропреобразователях механически движущихся частей снижает их надежность и долговечность. Даже при такой низкой частоте, как 50 Гц, за сутки вибратор производит четыре миллиона переключений, что приводит к быстрому износу контактов, временному сдвигу моментов переключения и изменению скважности работы, требует периодического осмотра и регулировки. Недостатком являются также большие габариты.
Электронные модуляторы и демодуляторы. Замена электро-
механических модуляторов и демодуляторов электронными, представляющими собой полупроводниковые диоды и транзисторы, работающие в ключевом режиме, позволяет избавиться от указанных недостатков, но ценой некоторого увеличения дрейфа нуля. Однако дрейф на 2÷3 порядка меньше, чем в усилителях прямого усиления с балансными каскадами.
В настоящее время в основном применяют транзисторные модуляторы, имеющие меньший дрейф, чем ламповые (у которых большие остаточные напряжения) и параметрические модуляторы. Частота преобразования значительно выше, чем у вибратора. Небольшие габариты и вес, отсутствие подвижных частей, высокая надежность являются несомненными достоинствами полупроводниковых модуляторов и демодуляторов. Недостатки – несколько
104
больший дрейф (из-за температурной нестабильности), наличие выбросов при переключении.
Модуляторы и демодуляторы на реактивных элементах.
Принцип действия основан на изменении их проводимости под действием управляющего сигнала. Такие модуляторы позволяют усиливать мощность. В качестве реактивных элементов применяют конденсаторы с нелинейной емкостью, на основе которых строят параметрические усилители, и нелинейную индуктивность, применяемую в магнитных усилителях. Рассмотрение параметрических усилителей, используемых главным образом в СВЧ технике, и магнитных усилителей выходит за рамки данного курса.
В упрощенной схеме усилителя с преобразованием сигнала (см. рис. 3.6) модулятор и демодулятор представлены в виде идеальных ключевых элементов К1 и К2.
Реальным ключевым элементам свойствен целый ряд особенностей, без учета которых нельзя определять характеристики усилителей с преобразованием сигнала. В проводящем состоянии ключевые элементы можно заменить источником напряжения с остаточным напряжением Uост и внутренним сопротивлением r0, а в разомкнутом – источником тока Iут, шунтированным сопротивлением утечки rут. В практических схемах модуляторов определяющими являются остаточное напряжение на ключевом элементе, ток утечки и дрейф этих величин, Что касается сопротивления rут, то в большинстве случаев его влияние несущественно, поэтому в последующем анализе его не будем учитывать.
Дрейф остаточного напряжения Uост.др и тока утечки Iут.др преобразуется модулятором в переменный сигнал и передается через усилитель на выход, поэтому дрейф МДМ-усилителя определяется, прежде всего, дрейфом модулятора. Чтобы снизить нулевой уровень модулятора Uост и его дрейф, прибегают к различным способам компенсации остаточных параметров транзисторных ключей. В частности, широко распространена схема компенсированного ключа с последовательным включением транзисторов [5].
Дрейф демодулятора не является определяющим, так как на демодулятор поступает усиленный входной сигнал, амплитуда которого значительно превышает его дрейф.
105
Недостатком усилителей с преобразованием сигнала является то, что они практически не способны воспроизводить высокочастотные сигналы, а также импульсные сигналы без заметного искажения крутых перепадов. Этот недостаток устраняется применениемкомбинированных усилителей, в которых усиление постоянных составляющих и медленно меняющихся сигналов производят усилителем постоянных сигналов, в частности МДМ-усилителем, а высокочастотный спектр сигналов усиливается усилителем, имеющим сравнительно широкую полосу пропускания в области высших частот.
3.4.Усилители – активные фильтры
Кусилителям – активным фильтрам относятся электронные устройства, которые наряду с усилением сигналов производят их фильтрацию от помех, наводок и шумов с целью превосходства полезных сигналов над другими видами сигналов.
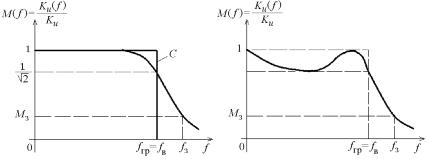
Если требуется подавление высокочастотных помех и шумов с возможно большим усилением полезных сигналов с низкочастотным спектром, то применяют активные фильтры нижних частот (ФНЧ), АЧХ которых представляется графиками, показанными на рис. 3.8.
а |
б |
Рис. 3.8. Гладкая (а) и равноволновая (б) нормированные АЧХ ФНЧ
106
Для выделения сигналов с высокочастотным спектром по сравнению с низкочастотными помехами и шумами применяют активные фильтры верхних частот (ФВЧ), АЧХ которых показаны на рис. 3.9.
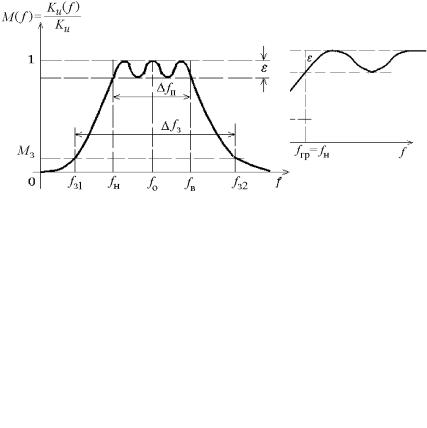
Для фильтрации сигналов, спектральная плотность которых укладывается в узкой полосе пропускания с граничными частотами fн и fв, близкими друг к другу, применяют полосовые фильтры, АЧХ которых представлена на рис. 3.10. Эти фильтры рассматриваются в разделе «Избирательные усилители».
а б
Рис. 3.9. Гладкая (а) и равноволновая (б) нормированные АЧХ ФВЧ
Рис. 3.10. Нормированная АЧХ полосового фильтра
107

3.4.1. Активные RC-фильтры низких частот
Такие фильтры применяются в усилительных трактах электронных устройств, предназначенных для регистрации сигналов с низкочастотным спектром, к числу которых относятся электрокардиографы и энцефалографы. При этом удается существенно ослабить влияние шумов и помех с более высокочастотным спектром, чем полезные сигналы, и тем самым заметно увеличить отношение сигнал/шум.
Нормированная АЧХ ФНЧ (см. рис. 3.8), обычно задается следующими параметрами:
1) граничной частотой fгр, равной частоте, при превышении которой искажения сигнала становятся больше предельно допустимой величины;
2) полосой пропускания fп, определяемой разностью fп =
=fв – fн. Для ФНЧ fп = fв, так как fн = 0;
3)неравномерностью АЧХ в полосе пропускания ε, определяе-
мой допустимыми искажениями сигнала в заданной полосе частот; 4) коэффициентом Kп, характеризующим близость АЧХ к АЧХ идеального ФНЧ. Коэффициент Kп определяется отношением частоты fз, соответствующей заданному значению нормированной АЧХ (на рис. 3.8 – это Мз) вне полосы пропускания, к граничной
частоте, т.е. Kп = ffз .
гр
В теории цепей частоту fз называют частотой заграждения, а коэффициент Kп – коэффициентом прямоугольности, так как Kп характеризует близость реальной АЧХ к идеальной АЧХ в виде прямоугольной характеристики с Kп = 1 (см. С на АЧХ на рис. 3.8,а).
Проектирование фильтров начинают с составления передаточной функции, которую аппроксимируют [6] полиномиальной функцией, коэффициенты которой определяют исходя из указанных параметров ФНЧ. Полиномиальная аппроксимация получила наибольшее распространение, так как она связана со сравнительно простым расчетным аппаратом и при этом обеспечивает минимальный коэффициент Kп при относительно невысоком порядке полинома п. Не менее важной является и простота реализации АУ.
108
Аппроксимация полиномами Баттерворта. Эта аппроксима-
ция обеспечивает АЧХ, гладкую в полосе пропускания (см. рис. 3.8,а), и определяется функцией
|
|
Mn (ν) = |
|
1 |
|
|
|
, |
|
|
|
|
1+ r2B2 |
(ν) |
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
п |
f |
|
ω |
|
||
где Вп = ν |
п |
– полином Баттерворта; |
ν = |
|
= |
– нормированная |
||||
|
|
fгр |
|
ωгр |
||||||
частота; r – коэффициент неравномерности, определяемый через неравноменость АХЧ соотношением
r = |
|
1 |
−1 . |
|
−ε)2 |
||
(1 |
|
||
Коэффициент прямоугольности можно определить из соотно-
шения Kп = νз, где νз = |
fз |
– нормированная частота, соответст- |
|
||
|
fгр |
|
вующая Мз. Поскольку в выражении Мп(ν) фигурирует частота ν, нормированная по граничной частоте fгр, то очевидно, что коэффициент Kп равняется нормированной граничной частоте полосы за-
граждения νз = fз . Действительно, в соответствии с определени-
fгр
ем коэффициента прямоугольности
Kп = |
fз |
= |
fз |
= νз . |
|
|
|||
|
fп |
fгр |
||
Таким образом, определив νз из соотношения
Мз = |
1 |
, |
|
1+ r2νз2п |
|||
|
|
получим
1 |
|
1 |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
Kп ≡ νз = 2п |
2 |
|
2 |
−1 |
≈ |
п rМз |
. |
|
|
r |
|
|
M з |
|
|
|
|
Чем выше степень полинома п, тем меньше коэффициент Kп, т.е. тем ближе АЧХ к идеальной. При заданной п данная аппроксимация обеспечивает меньшую прямоугольность, чем Чебышев-
109
ская (см. ниже), однако линейность ФЧХ при данной аппроксимации лучше.
Процесс аппроксимации сводится к определению степени п, при которой коэффициент Kп ≤Kп.доп. Можно показать, что п и Kп связаны следующим соотношением:
п ≈ − ln(rM з) .
Коэффициенты передаточной функции Мп(ν), аппроксимированной полиномами Баттерворта, определяются из соответствующих таблиц [7], при составлении которых принят коэффициент r = 1. При данном значении коэффициента граничная частота fгр
соответствует М(fгр) = 1 . При этом степень полинома определя-
 2
2
ется упрощенной формулой
п ≈ − ln M з , ln Kп
а соответствующий коэффициент прямоугольности
Kп ≈ п М1 з .
Отметим, что аппроксимация полиномами Баттерворта одновременно обеспечивает оптимальный синтез АЧХ, гладкой в полосе пропускания. Эта АЧХ оптимальна в том смысле, что при заданной элементной базе и прочих равных условиях она обеспечивает наименьший коэффициент прямоугольности.
Аппроксимация полиномами Чебышева. Аппроксимация по Баттерворту обеспечивает монотонную АЧХ, однако с большим коэффициентом Kп. Более круто спадающие АЧХ вне полосы пропускания получаются при аппроксимации по Чебышеву. При этом в полосе пропускания АЧХ представляется равноволновой функцией с коэффициентом неравномерности ε (см. рис. 3.8,б).
Вне полосы пропускания АЧХ быстро и монотонно спадает, так как полиномы Чебышева резко возрастают при ν > 1. АЧХ, аппроксимированная полиномами Чебышева, имеет вид
110