

Древс Системы реалного времени технические и программные средства 2010
.pdfСистемы третьего типа предназначены для получения информации о наличии объектов в определенных зонах воздушной или водной среды. Главные оперативные задачи – это обнаружение объекта, его опознание и наблюдение за изменениями местоположения объектов в пределах границ контролируемого пространства.
Основными переменными системы, оптимальное регулирование которых позволяет добиваться отображения сигнала-носителя на средствах индикации, являются такие, как положение (направленность) и чувствительность приемных устройств.
Характерными средствами отображения информации в системах наблюдения за обстановкой являются индикаторные устройства экранного типа, обеспечивающие круговой или секторный обзор пространства. Органы управления представлены настроечными вращательными рукоятками, маховичками и т.п.
Условия работы в системах наблюдения требуют постоянного внимания. Как правило, наблюдение за экраном ведется при пониженной внешней освещенности, что способствует повышению чувствительности зрения и повышает контраст «сигнал – фон». Однако при пониженной освещенности ухудшаются условия выполнения других действий. Из-за необходимости местной подсветки элементов оборудования возникает неравномерность яркости поля зрения, вызывающая дополнительную нагрузку на механизмы адаптации зрительной системы человека. В течение смены могут быть резкие перепады интенсивной и малоактивной, монотонной деятельности. Оператор системы наблюдения также должен обладать способностью к длительной концентрации внимания и большим объемом оперативной памяти.
Системы четвертого типа обеспечивают оптимальный или заданный режим источника энергии в течение заданного времени. Оперативные задачи в системе можно представить как контроль и регулирование энергетического оборудования, контроль и регулирование нагрузки, контроль энергоресурсов, защита энергетической установки.
Основными переменными контроля и регулирования для оператора являются переменные энергии (напряжение, сила тока, давление, температура и т.п.) и переменные оборудования (техническое
201
состояние и рабочее положение отдельных элементов, скорость вращения, изоляция, сопротивление, вибрация и т.п.).
Основные средства отображения – это мнемосхемы, а также стрелочные цифровые и контрольно-измерительные приборы; органами управления являются переключатели и регуляторы.
Условия работы характеризуются достаточно большим однообразием в силу высокой степени автоматизации. Основная функция управления – контроль, поэтому очень важна проблема сохранения готовности к действию. В критических ситуациях от оператора требуется быстрое принятие решения, основывающегося на правильном техническом диагнозе.
Когда посты операторов располагаются в непосредственной близости от агрегатов, операторы подвергаются воздействиям шума, вибраций, высокой температуры, ускорений, качки и т.п.
Оператор автоматизированной системы управления энергетической установкой должен обладать глубокими знаниями устройства оборудования, взаимодействия отдельных устройств. Он должен хранить в памяти большое число количественных характеристик различных переменных и параметров. Оператор должен уметь реализовывать эти данные при постановке технического диагноза, уметь осуществлять ручное управление.
Пятый тип систем управления предназначаются обычно для массового выпуска каких-либо изделий или вещества. В течение одного цикла технологического процесса начальная форма продукта может доводиться либо до конечной формы, либо только до промежуточной формы, пригодной для последующей обработки.
В качестве оперативных задач следует назвать регулирование работы блоков автоматического оборудования, выполнение отдельных операций с использованием механизированных блоков оборудования, обеспечение заданного ритма циклов технологического процесса, контроль качества продукции.
Основными переменными контроля и регулирования являются переменные физического состояния продукта (температура, размер, вес, цвет и т.п.), а также переменные состояния оборудования. В качестве средств отображения информации наиболее часто используются световые и звуковые сигнализаторы, а также шкальные ин-
202
дикационные устройства. Типичными органами управления, используемыми на постах управления систем данного типа, являются кнопки, педали, маховички и рычаги.
Условия работы оператора характеризуются монотонностью, выраженной тем сильнее, чем чаще осуществляются циклы технологического процесса.
Успешность деятельности лица, принимающего решения по управлению, в первую очередь зависит от того, насколько информационная модель системы по форме и композиции соответствует его задачам по управлению и его психофизиологическим возможностям по приему и переработке информации.
Прежде всего, это соответствие скорости выдаваемой моделью информации пропускной способности оператора. Эта характеристика существенно зависит от организации его работы. Ее можно характеризовать полным временем оператора. Под этим термином понимается время, необходимое оператору для выполнения одной логически законченной операции, которая может состоять из нескольких частных операций. Условно полное время оператора можно представить в виде следующего выражения:
Tоп = Tзп + TпN + T'п + Tоу + Tм + Tк,
где Tзп – суммарное время зрительного поиска; Tп – время приема информации и принятия решения в тех случаях, когда не требуется осуществление исполнительных действий; N – количество индикаторов, проконтролированных оператором до того, как он принял информацию, требующую исполнительных действий; T'п – время приема информации и принятия решения в том случае, когда требуется выполнение определенных исполнительных действий; Tоу – время обнаружения органа управления; Tм – время моторного акта, непосредственно связанного с движением органа управления; Tк – время контроля результата действия.
Обычно пропускная способность не превышает 30 дв. ед./с; реально она лежит в пределах 1…5 дв. ед./с.
Организация потоков информации должна исключать как перегрузку, так и недогрузку оператора.
Для уменьшения перегрузки необходимо:
203
-предоставлять информацию оператору с необходимым упреждением к началу исполнения;
-сократить поток информации до необходимого минимума;
-предусмотреть возможность фильтрации информации;
-разработать рациональную схему деятельности оператора;
-позволить оператору использовать для принятия решения максимальное время (в пределах общего времени, отведенного на выполнение задачи);
-сохранять на индикаторе информацию по желанию оператора на необходимое время.
Недогрузка оператора вызывает ослабление внимания, что приводит к потере ритма и к ошибкам. Для уменьшения недогрузок необходимо:
-сократить до минимума время от запроса до воспроизведения информации, а также время формирования изображения;
-обеспечить достаточную интенсивность потока информации (при интенсивности потока 1…10 сигналов в час уже может наблюдаться заметное ослабление внимания);
-принять меры к повышению «заметности» вновь появляющейся информации;
-ограничить площадь размещения информации;
-обеспечить оператору возможность контроля за правильностью своих действий.
Большое значение имеет выбор системы кодирования информации. Применительно к деятельности оператора кодированием называется способ представления информации с помощью условных символов. Оптимальным является такой способ кодирования, который обеспечивает максимальную скорость и надежность приема информации человеком.
Задача оптимального кодирования заключается в правильном выборе категории кода, длины алфавита сигналов, уровня кодирования. Категория кода определяется способом кодирования: видом символов, яркостью, цветом, частотой мелькания, размерами. В задаче опознания наибольшую эффективность обеспечивает цвет, в задачах поиска – цвет и вид символов. Наиболее эффективным в
204
условиях большой нагрузки на оперативную память являются цифровой и буквенный коды.
Для привлечения внимания оператора целесообразно использовать кодирование различной частотой мелькания. Привычные ассоциации сложились у человека по отношению к различным цветам: красный цвет обычно ассоциируется с опасностью, желтый – с необходимостью получения какого-либо предупреждения, зеленый – со спокойной обстановкой.
Человек-оператор допускает большое число ошибок при управлении сложными системами. По его вине происходит около 40 % общего количества отказов при испытаниях ракет, 64 % отказов в военно-морском флоте и до 70 % отказов в авиации. Надежность оператора обеспечивается правильной организацией режима труда и отдыха, а также подготовкой операторов, обеспечивающей умение регулировать работоспособность в зависимости от требований, диктуемых различными условиями работы [8].
Важнейшими показателями организации режима труда операторов являются: коэффициент загруженности, период занятости, длина очереди [9].
Коэффициент загруженности представляет величину
η = 1 – (τр/Тдеж),
где τр – общее время, в течение которого оператор не занят обработкой поступающей информации; Тдеж – общая продолжительность дежурства. Рекомендуемое значение η ≤ 0,75.
Под периодом занятости понимается время непрерывной работы; рекомендуется, чтобы оно не превышало 15 мин.
Вероятность работы в условиях очереди не должна превышать 0,4; при этом длина очереди не должна превышать трех сигналов.
Контрольные вопросы и упражнения
1.Расскажите о классификации средств отображения. Приведите примеры всех типов устройств отображения.
2.Нарисуйте структуру электронно-лучевой трубки и объясните назначение отдельных элементов.
3.Нарисуйте структуру LCD-панели и объясните принцип ее действия.
205
4.Перечислите основные требования к информационной модели системы управления.
5.Что нужно делать для уменьшения перегрузки?
6.Что нужно делать для уменьшения недогрузки?
7.Расскажите о классификации средств управления системой.
8.Каково обязательное требование к средствам управления?
9.Какие принципы используются для связи средств управления с другими средствами системы? В чем они заключаются?
10.Каким образом компонуются средства управления со средствами отображения на пультах управления?
11.Предложите способы уменьшения полного времени оператора.
206
7.ИСПОЛНИТЕЛЬНЫЕ СРЕДСТВА
7.1.Виды исполнительных средств
Исполнительные средства предназначены для создания управляющего воздействия на регулирующие органы объекта управления с целью изменения состояния объекта в соответствии с алгоритмом управления. Состояние объекта определяется состоянием или положением регулирующих органов.
В зависимости от управляющего воздействия на выходе исполнительного элемента они делятся на силовые и параметрические. Изменение пространственного положения регулирующего органа возможно только если исполнительное устройство создает управляющее воздействие в виде силы или момента. Такие исполнительные органы получили название силовых. К ним относятся электромагниты, муфты, двигатели. Исполнительные элементы, изменяющие состояние регулирующего органа (сопротивление, напряжение, ток), называются параметрическими. К ним относятся электромагниты, контакторы, тиристорные и транзисторные реле.
Основные требования к силовым исполнительным устройствам заключаются в следующем:
-их максимальная сила или момент должны быть больше, чем перестановочное усилие на регулирующем органе;
-они должны иметь максимальный КПД;
-их статические характеристики должны быть близки к линей-
ным;
-они должны иметь минимальный порог чувствительности, небольшую мощность управления, высокую надежность и долговечность, небольшие размеры и массу.
Выходные порты компьютера имеют очень низкую мощность и не могут управлять каким-либо физическим устройством; сигнал необходимо усиливать. На уровнях мощности до нескольких сотен ватт можно использовать операционные усилители мощности. При больших мощностях чаще используются программируемые источники энергоснабжения. Для этих целей служит широтноимпульсная модуляция (ШИМ). Принцип ШИМ заключается в том, что выходное напряжение переключается между двумя постоянными значениями с высокой частотой, обычно в диапазоне не-
207

скольких килогерц. Средний уровень напряжения поддерживается изменением ширины импульса.
7.2. Основные типы силовых исполнительных органов
Электромагниты – это преобразователи электрического сигнала в механическое движение. Они делятся на удерживающие и приводные. Удерживающие электромагниты служат для фиксации положения ферромагнитных тел (например, электромагнитные плиты для фиксации деталей на металлообрабатывающих станках). Они не совершают никакой работы, от них требуется лишь определенная сила, на которую они рассчитываются. Приводные электромагниты служат для перемещения регулирующих органов (например, клапанов, заслонок), а также используются в контакторах, электромагнитных муфтах и др. Эти электромагниты совершают определенную работу и поэтому рассчитываются на определенную силу и перемещение.
Электромагнитные муфты служат для передачи вращающего момента с ведущего входного вала (чаще всего приводного двигателя) на соосный ведомый выходной вал (вал приводимого регулирующего органа). Для быстрого включения, выключения и реверса приводимых механизмов, а также для регулирования их скорости и ограничения передаваемого момента применяют различные управляемые электромеханические сцепные муфты. Рассмотрим некоторые примеры таких муфт.
Фрикционные муфты служат для жесткого сцепления валов.
|
На рис. 7.1 показана однодисковая |
||
|
нереверсивная фрикционная |
муфта, |
|
|
состоящая из двух цилиндрических |
||
|
полумуфт |
[2]. На ведущем валу 7 |
|
|
жестко посажена полумуфта 4, яв- |
||
|
ляющаяся |
сердечником и |
ярмом |
|
электромагнита. Его якорем служит |
||
|
полумуфта 2, которая соединена с |
||
|
ведомым валом 1 скользящей посад- |
||
|
кой и, следовательно, может пере- |
||
Рис. 7.1 |
мещаться в осевом направлении. С |
||
|
|||
208
помощью колец 6 и щеток на обмотку 5 подается управляющее напряжение. Возникающее тяговое усилие вызывает притяжение якоря (полумуфты 2) к сердечнику (полумуфте 1) и плотное сцепление фрикционных дисков 3 из материалов с высоким коэффициентом трения, за счет чего обеспечивается сцепление валов. Основное достоинство однодисковой фрикционной муфты – простота, однако с ростом передаваемого вращающего момента значительно увеличиваются ее размеры.
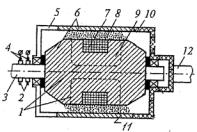
Ферропорошковые муфты служат для гибкого сцепления валов. В них полумуфта на ведомом валу посажена жестко, и неизменный воздушный зазор заполнен магнитодиэлектриком, обладающим свойством тиксотропии – способностью становится студенистым, все более загустевая вплоть до затвердения по мере усиления магнитного поля, а при снятии его возвращаться в исходное
состояние. |
|
|
На рис. 7.2 показана схема ци- |
|
|
линдрической ферропорошковой |
|
|
муфты с двумя цилиндрическим |
|
|
поверхностями 9 и 10. Кольцевое |
|
|
пространство между ними запол- |
|
|
нено порошковой смесью 8. |
Де- |
|
тали 6 выполнены из ферромаг- |
|
|
нитных материалов. На внутрен- |
Рис. 7.2 |
|
ней ведущей полумуфте (3 – |
ве- |
|
дущий полувал) расположена обмотка возбуждения 7, выведенная на контактные кольца 2, к которым прижимаются щетки 4. Крышки 5 и 11, изготовленные из немагнитного материала, позволяют направить большую часть магнитного потока 1 через порошковый слой, уменьшив поток рассеяния, и снизить массу ведомой полумуфты.
Исполнительные электродвигатели находят широкое при-
менение в системах управления. Теоретические основы электрических двигателей вкратце сводятся к следующему.
У машины постоянного тока нормального исполнения цилиндрический ротор с расположенной на нем обмоткой, называемый якорем, вращается в неподвижном магнитном поле, создаваемом обмоткой возбуждения, расположенной на статоре, на которую подается постоянное напряжение (рис. 7.3). Протекание тока в обмот-
209

ке якоря обусловлено напряжением U, направление которого совпадает с направлением тока. Это напряжение подается на якорь через щетки и коллектор – совокупность медных изолированных друг от друга пластин, образующих цилиндр, по которому скользят щетки. Наличие коллектора является отличительной особенностью машин постоянного тока. Его пластины образуют полукольца, к которым присоединяются начала и концы витков обмотки.
Рис. 7.3
На проводники с током действует электромагнитная сила, приводящая в движение якорь. В положении а развиваемый двигателем момент будет максимальным, так как стороны 1–3 витка пересекают магнитные линии перпендикулярно. При дальнейшем вращении момент начнет убывать. После поворота якоря на 45° щетки перейдут с пластин 1–3 коллектора на пластины 2–4 и подключатся к следующему витку (рис. 7.3, б). Момент будет сначала возрастать до максимума, а затем начнет уменьшаться, пока щетки снова не перейдут на пластины 3–1 и момент снова начнет возрастать и т.д. Рост и уменьшение момента происходят за время, соответствующее повороту якоря на угол π/2, на протяжении которого каждая щетка касается одной и той же коллекторной пластины.
Управлять двигателем постоянного тока можно четырьмя способами: 1) подачей переменного напряжения на якорь при постоянстве напряжения на обмотке возбуждения; 2) включением дополнительного сопротивления последовательно с якорем; 3) подачей переменного напряжения на обмотку возбуждения при постоянстве напряжения на обмотке якоря; 4) изменением сопротивления в цепи обмотки возбуждения.
210