

Древс Системы реалного времени технические и программные средства 2010
.pdfпроизводится (n+2)-я выборка, то есть имеет место конвейеризация обработки сигналов. Частота преобразования МС типа К1107ПВ1 – до 20 МГц.
4.6. Основные направления совершенствования схем и принципов преобразования
Среди современных АЦП все реже можно найти схемы, построенные «традиционным» способом (параллельные, последовательных приближений, интегрирующие). Для обеспечения лучших параметров (быстродействие, разрешающая способность) используются комбинированные структуры.
Практически все АЦП имеют последовательно-параллельную структуру со схемой выборки-хранения на входе и работают по принципу постоянного опроса, когда преобразование сигнала происходит постоянно с максимальной скоростью.
Это обеспечивается, в частности, применением дельтамодуляции. Преобразователь, реализующий этот принцип, состоит из компаратора и квантователя К в основном тракте обработки сигнала и из интегрирующего усилителя в цепи обратной связи (рис. 4.14, а). Алгоритм работы такого преобразователя поясняется рис. 4.14, б.
а |
б |
Рис. 4.14
121
Входной сигнал x(t) сравнивается с выходным сигналом xа(t) блока аппроксимации, выполненном на интегрирующем усилителе. На выходе компаратора формируется логический сигнал, соответствующий знаку разности между текущим и аппроксимированным значениями сигнала. Он определяет знак величины опорного напряжения u0, подаваемого на вход интегратора, и, следовательно, управляет изменением напряжения на его выходе.
Выходной сигнал дельта-модулятора – последовательность значений логических сигналов 1 и 0. Она должна быть преобразована в параллельный двоичный код. Это можно сделать с помощью реверсивного счетчика, который выполняет операцию сложения при поступлении 1 и вычитания при поступлении 0.
Данному преобразователю свойственна динамическая погрешность, возникающая в случае, когда скорость изменения входного сигнала превышает скорость изменения напряжения на выходе интегратора. Определяющими параметрами при этом служат частота тактовых импульсов и величина u0 .
Развитием этого принципа являются алгоритмы адаптивной дельта-модуляции.
Вариант параллельно-последовательной структуры преобразователя можно представить следующим образом. Входное напряжение подается одновременно на вход АЦП1 и на один из входов усилителя. АЦП1 выполняет грубое кодирование входного сигнала, формируя старшие разряды выходного кода. Выходы АЦП1 поступают на входы ЦАП, который формирует соответствующее напряжение. Это напряжение подается на инвертирующий вход усилителя. Усиленная разность входного сигнала и этого напряжения, представляющая собой погрешность квантования АЦП1, после фиксации кода и окончания переходных процессов в аналоговых цепях преобразуется с помощью АЦП2, выходной код которого объединяется с выходным кодом АЦП1.
Большинство АЦП имеет встроенный источник опорного напряжения и работает от одного источника питания (обычно 5 В).
Современные ЦАП характеризуются снижением энергопотребления и тенденцией к снижению стоимости. В связи с этим расширяется сфера применения ЦАП: в частности, они используются
122
вместо переменных и подстроечных резисторов. Для такого рода приложений достаточно иметь точность 8...10 разрядов и среднее быстродействие. Так, например, ЦАП типа AD8802/04 фирмы Analog Device, область применения которого – электронная подстройка (замена потенциометров), имеет 8 разрядов при 12 каналах установки с временем 0,6 мкс. Он потребляет мощность 55 мВт, работает от источника 3 В и имеет последовательный интерфейс для связи с системой.
4.7.Основные характеристики преобразователей
Взависимости от источника возникновения принято различать методические и инструментальные погрешности.
Методические погрешности АЦП являются следствием квантования дискретной величины сигнала по уровню и связанного с этим округления результата из-за конечного числа разрешенных уровней квантования. Исследованию этих погрешностей посвящено большое количество работ, поскольку в общем случае эти погрешности имеют сложный характер и многообразные формы проявления.
Впростейшем случае, когда шкала уровней равномерна и шаг квантования постоянный, максимальная погрешность квантования зависит от способа отождествления сигнала с уровнем квантования. Для случая отождествления с ближайшим меньшим уровнем
максимальная погрешность xk = max x(ti) yk = q; для случая отождествления с ближайшим уровнем xk = 0,5q. Рассматривая сигнал x(ti) = x как реализацию случайной величины X с плотностью распределения f(x), найдем для этого случая математическое ожидание погрешности:
xk |
q/2 |
|
M[ xk ] |
|
(x xk ) f (x)dx. |
xk q/2 |
|
|
Полагая, что величина q мала по сравнению с диапазоном из- |
||
менения сигнала, примем, |
что |
f(x) = f(xk). При этом условии |
M[ xk] = 0. Соотношение для оценки дисперсии погрешности
123
xk |
q/2 |
|
D[ xk ] |
|
(x xk )2 f (x)dx |
xk q/2 |
|
|
при аналогичном условии |
получает следующий вид: |
|
D[ xk] = q3f(xk)/12.
Обозначим вероятность попадания величины X в k-й интервал
через pk . При малом q можно принять pk f(xk)q. Поэтому
D[ xk] = q2pk/12.
Суммируя по всему диапазону (k = 1,2,...,N), получаем, что
D[ x] = q2/12.
Инструментальные погрешности возникают вследствие отклонения параметров и характеристик элементов АЦП от идеальных и (или) заданных. К их числу относятся: смещение нуля и изменение крутизны передаточной характеристики (вход–выход) АЦП, а также погрешности, вызванные нелинейностью. Эти погрешности относятся к наиболее трудно устранимым, поскольку их нельзя устранить регулировкой.
Различают интегральную и дифференциальную нелинейность. Интегральная нелинейность – это максимальное отклонение разности двух входных аналоговых сигналов, вызывающих последовательную смену выходных кодов АЦП, от значения, соответствующего единице младшего разряда кода при нулевых значениях погрешностей смещения нуля и изменения крутизны. Она выражается в долях младшего разряда или в процентах от предела шкалы. Интегральная нелинейность (или просто нелинейность) служит
оценкой кривизны передаточной характеристики АЦП в целом. Если каждый переход от одного кода к смежному происходит
при одинаковых приращениях входного сигнала, равных единице младшего разряда, то интегральная нелинейность равна нулю.
Дифференциальная нелинейность – это отклонение передаточной характеристики АЦП от идеальной в точках, каждая из которых равноудалена от двух соседних уровней квантования. Дифференциальная нелинейность измеряется в долях или процентах от младшего разряда. Она характеризует девиацию шага квантования и монотонность преобразования. Если дифференциальная нели-
124
нейность превышает единицу младшего разряда, то возможен пропуск кода.
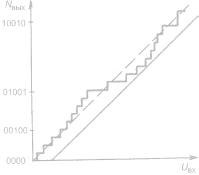
На рис. 4.15 абсцисса – входное напряжение, а ордината – двоичный код на выходе преобразователя. Пунктирная прямая – это передаточная характеристика идеального преобразователя. Сплошной линией показано смещение нуля преобразователя. В диапазоне входных напряжений, соответствующих выходным ко-
дам 00000...00100, преобразова-
тель работает идеально. В диапазоне кодов 00100...01001 определяется «монотонная нелинейность»
– изменение крутизны передаточной характеристики. В диапазоне 01001...10011 нелинейность имеет немонотонный характер, который описывается дифференциальной и интегральной нелинейностями. Случай пропуска кода показан для кода 10010.
Дифференциальная нелинейность характерна для преобразователей последовательной аппроксимации, что объясняется использованием в ЦАП взвешенных источников тока. Для интегрирующих АЦП преобладающей является интегральная нелинейность, обусловленная главным образом нелинейностью интегратора.
Изменение температуры окружающей среды является причиной изменения величины смещения нуля, крутизны передаточной характеристики и нелинейности.
Обычно справочные данные по АЦП (в том числе – по нелинейности) приводятся для статического режима, т.е. они измеряются при неизменном входном сигнале. Однако в динамическом режиме передаточная характеристика существенно изменяется.
Динамические свойства АЦП определяются переходными процессами в аналоговых электронных схемах, временем развертки значений меры и формирования цифрового эквивалента. Суммарное время составляет время преобразования. Полное время цикла преобразования включает в себя также время на установку преоб-
125
разователя в исходное состояние и время для синхронизации с началом такта.
Одно из проявлений переходных процессов в аналоговых цепях
– задержка истинного момента запуска АЦП относительно номинального (апертурное время tа). Поскольку апертурное время – величина случайная, то оно вносит неустранимую погрешность: за время tа входной сигнал может измениться на величину tаx'(t), где x'(t) – скорость изменения входного сигнала в момент t. Полная динамическая погрешность определяется полным временем цикла преобразования. Динамическая погрешность связывает характеристики преобразователя и свойства измеряемого процесса, поскольку максимальная производная x'max связана с частотой среза fс спектра входного сигнала, имеющего максимальное значение xmax, соотно-
шением x'max fс xmax .
Динамическая погрешность проявляется только в том случае, если она превышает разрешающую способность преобразователя.
Разрешающая способность определяется как минимальная величина изменения входного сигнала, вызывающая изменение выходного кода на единицу младшего разряда. Она может задаваться в процентах от полного диапазона, в единицах измерения входной величины или, как это чаще всего делается, числом разрядов преобразователя.
Контрольные вопросы и упражнения
1.Постройте временные диаграммы, поясняющие работу преобразователя последовательного счета и появление задержек t1 и t2.
2.Разработайте блок-схему преобразователя фазы в код.
3.Разработайте блок-схему АЦП последовательного счета.
4.Запишите в формализованном виде алгоритм метода поразрядного кодирования.
5.Разработайте блок-схему АЦП следящего преобразования.
6.Предложите принцип адаптивного преобразования и блок-схему преобразователя (указание: нужно задаться величиной его разрешающей способности).
126
7.Предложите схему простого интегрирующего преобразователя (с однократным интегрированием). Укажите основные источники погрешностей этого преобразователя.
8.Напишите формулу для оценки погрешности интегрирующего преобразователя, возникающей из-за нелинейности интегратора.
9.Выведите зависимость между частотой среза входного сигнала и его максимальной производной.
10.Нарисуйте, как зависит от величины входного сигнала погрешность квантования:
а) для двух способов отождествления сигнала с уровнем квантования при идеальной передаточной характеристике;
б) при смещении нуля передаточной характеристики; в) при изменение крутизны передаточной характеристики; г) при наличии интегральной нелинейности; д) при наличии дифференциальной нелинейности.
11.Нарисуйте временную диаграмму работы преобразователя и покажите на ней временные характеристики АЦП и период дискретизации входного сигнала. Что ограничивает сверху и снизу частоту дискретизации?
12.Проведите анализ совместной работы схемы выборки-хранения (СВХ) и АЦП. Какие погрешности характеризуют их совместную работу? При каких условиях можно исключить СВХ на входе АЦП?
13.От каких параметров АЦП зависит его стоимость? Предложите варианты этой зависимости.
127
5. СРЕДСТВА ПЕРЕРАБОТКИ ИНФОРМАЦИИ
5.1. Типы средств переработки информации
Функции по переработке информации возлагаются на вычислительный комплекс, который в простейшем случае представляет собой одиночную ЭВМ, а в сложных АСУ РВ – многомашинную или многопроцессорную вычислительную систему. Можно выделить следующие виды средств переработки информации в АСУ реального времени.
1.Контроллер на базе персонального компьютера. Основные сферы использования – небольшие специализированные системы автоматизации в медицине, научных лабораториях, средствах коммуникации и для АСУТП небольших объектов с числом входов/ выходов порядка нескольких десятков. Выполняемые функции – обработка измерительной информации.
2.Локальный контроллер. Используются два типа таких контроллеров: 1) встраиваемый в оборудование и являющийся его неотъемлемой частью (станки с числовым программным управлением, автомашинисты, аналитические приборы); 2) автономные, реализующие функции контроля и управления небольшим изолированным объектом. Контроллеры первого типа выпускаются без кожухов, второго – в защитных корпусах для разных условий окружающей среды. Локальные контроллеры рассчитаны на десятки входов/выходов, их вычислительная мощность невелика. Обычно они имеют интерфейсы для связи с другими средствами автоматизации.
3.Сетевой комплекс контроллеров. Это наиболее распростра-
ненный тип. Его минимальный состав – набор контроллеров, дисплейные пульты операторов, промышленная сеть для передачи коротких сообщений. Функции этих контроллеров – контроль и управление с числом входов/выходов порядка тысяч.
4.Распределенные системы управления малого масштаба. Ос-
новное отличие от предыдущего типа – большее разнообразие мо-
128
дификаций, блоков ввода/вывода, панелей оператора; большая мощность центральных процессоров контроллеров, позволяющая им обрабатывать более 10000 входных/выходных сигналов; выделение отдельных конструктивов удаленных блоков ввода/вывода, рассчитанных на работу в различных условиях окружающей среды. Эти контроллеры могут поддерживать несколько уровней сетей – полевые сети для связи с датчиками, сети первого уровня для связи контроллеров между собой и сети второго уровня для связи с оператором всего участка производства. В дополнение к обычным функциям управления эти контроллеры могут реализовывать сложные алгоритмы управления (например, задачи статической и динамической оптимизации).
5. Полномасштабные распределенные системы управления.
Этот тип контроллеров практически не имеет ограничений ни по выполняемым функциям, ни по объему автоматизируемого объекта. Дополнительно к рассмотренным ранее возможностям эти контроллеры имеют следующие свойства:
-наличие промышленных сетей, позволяющих подсоединять к одной шине сотни узлов (контроллеров и пультов);
-существование весьма мощных модификаций контроллеров;
-использование информационных сетей для связи пультов операторов друг с другом, для связи с серверами, с корпоративной сетью предприятия;
-взаимодействие пультов управления в клиент-серверном режиме;
-наличие в составе программного комплекса пакетов, реализующих функции эффективного управления отдельными агрегатами (многосвязное регулирование, оптимизация и т.п.), диспетчерского управления участками производства (поддержка принятия управленческих решений), технического учета и планирования производства в целом.
Одиночные ЭВМ могут представлять собой микроконтроллеры, скалярные, суперскалярные и векторные процессоры с системами памяти, устройствами управления и средствами ввода/вывода.
129
Микроконтроллер – это законченная микропроцессорная система обработки информации, реализованная виде одной БИС и объединяющая в пределах одного полупроводникового кристалла основные блоки управляющей системы: центральный процессор, постоянное запоминающее устройство, оперативное запоминающее устройство, периферийные устройства для ввода и вывода информации.
Индустриальная рабочая станция — это системный блок, дис-
плей и клавиатура в одном конструктиве.
Скалярный процессор – это программно-управляемое устройство для обработки цифровой информации и управления процессом обработки, содержащее минимально необходимый набор устройств для выполнения этих операций: операционное (арифметикологическое) устройство с устройством управления, внутреннюю сверхоперативную память и внутреннюю шину для обмена информацией.
Суперскалярный процессор имеет несколько операционных устройств, что позволяет ему вести параллельную обработку информации.
Векторный процессор имеет структуру и систему команд, обеспечивающие возможность выполнения векторных операций.
Рост потребностей пользователей и развитие идей параллелизма привело к созданию многомашинных и мультипроцессорных вычислительных систем.
Многомашинная система состоит из нескольких машин, каждая из которых имеет свою внутреннюю память и работает под управлением своей операционной системы, и средства обмена информацией между машинами.
Мультипроцессорные системы имеют следующие отличитель-
ные особенности: наличие единой операционной системы и общих периферийных устройств; возможность перераспределения программ между процессорами; возможность прерывания работы одних процессоров в зависимости от работы других.
130