

Л.С. Жданов Техника транспорта. Часть 2
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образование
«КУЗБАССКИЙ ГОСУДАРСTВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра автомобильных перевозок
ТЕХНИКА ТРАНСПОРТА
Часть 2
Методические указания к курсовой работе для студентов специальности 240400 «Организация и безопасность дорожного движения» (дневной формы обучения)
Составители: Л.С. Жданов В.Л. Жданов
Рассмотрены и утверждены на заседании кафедры Протокол № 43 от 06.11.02
Рекомендованы к печати учебно-методической комиссией специальности 240400 Протокол № 43 от 06.11.02
Электронная копия хранится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
|
СОДЕРЖАНИЕ |
|
6 Определение параметров эксплуатационных свойств, |
|
|
влияющих на безопасность АТС . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2 |
|
6.1 |
Рулевое управление . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2 |
6.2 |
Определение параметров управляемости . . . . . . . . . . . . . . . . . |
8 |
6.3 |
Определение параметров устойчивости . . . . . . . . . . . . . . . . . . |
9 |
6.4 |
Определение параметров тормозных свойств . . . . . . . . . . . . . |
10 |
6.5 |
Тормозные механизмы с приводом . . . . . . . . . . . . . . . . . . . . . . |
11 |
Список рекомендуемой литературы . . . . . . . . . . . . . . . . . . . . . . |
14 |
|
2
6 Определение параметров эксплуатационных свойств, влияющих на безопасность АТС
С учетом специфических особенностей комплекса «автомобиль – водитель – дорога – среда» вопросы повышения безопасности дорожного движения целесообразно рассматривать во взаимосвязи систем обеспечения активной, пассивной, послеаварийной и экологической безопасности.
Цель функционирования системы обеспечения активной безопасности заключается в снижении вероятности дорожно-транспортного происшествия (ДТП); системы обеспечения пассивной безопасности – в снижении вероятности и тяжести травмирования участников дорожного движения (водителей, пассажиров и пешеходов) при ДТП; системы обеспечения послеаварийной безопасности – в снижении вероятности и тяжести травмирования участников дорожного движения после ДТП; системы обеспечения экологической безопасности – в снижении воздействия АТС на окружающую среду.
Оптимизация параметров перечисленных систем повышает не только безопасность движения, но и эффективность транспортного процесса, снижает себестоимость перевозок грузов и пассажиров. На безопасность влияет огромное число факторов, однако активная безопасность АТС зависит в первую очередь от эксплуатационных свойств подвижности: управляемости, устойчивости, тормозных свойств. Поэтому целью данного раздела является расчет основных параметров этих свойств проектируемого АТС, оценка их уровня для обеспечения безопасности, умение выбирать, обосновывать и рассчитывать элементы перечисленных систем.
6.1 Рулевое управление
Эта система управления служит для изменения или поддержания заданной траектории движения АТС путем согласованного между собой поворота управляемых колес АТС. В общем случае рулевое управление состоит из трех основных частей: рулевого механизма, рулевого привода и усилителя. На легких АТС усилитель может отсутствовать.
Рулевое управление в значительной степени определяет уровень управляемости и устойчивости АТС и должно удовлетворять следую-
3
щим требованиям: поддерживать такое соотношение между углами поворота колес, при котором их качение не сопровождается боковым скольжением; обеспечивать согласованность в кинематическом и силовом отношении между поворотом рулевого и управляемых колес; создавать условия для обеспечения легкости и маневренности АТС.
Оценочными параметрами рулевого управления являются кинематическое и силовое передаточные числа, величина зазора в зацеплении и жесткость рулевого привода, коэффициент полезного действия рулевого управления в прямом и обратном направлениях.
6.1.1 Кинематический расчет рулевого привода
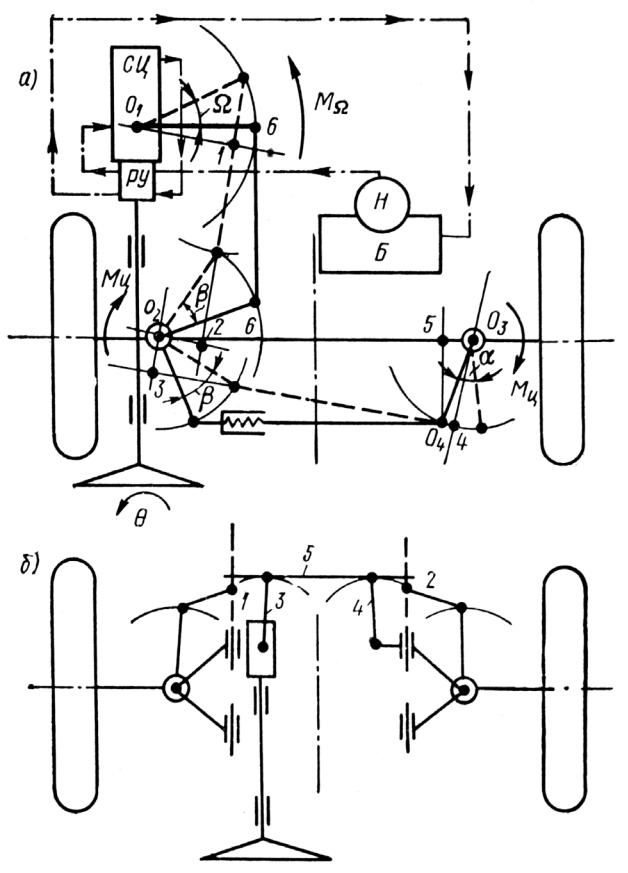
Под рулевым приводом понимается система тяг, рычагов и шарниров, осуществляющая передачу необходимых для поворота управляемых колес усилий от рулевого механизма и усилителя и обеспечивающая правильную кинематику движения АТС. Часть рулевого привода (поперечная тяга, боковые рычаги) называется рулевой трапецией. Схемы рулевого привода зависят от типа подвески: на рисунке 1 схемы а) и б) относятся соответственно к зависимой и независимой подвеске.
Основными элементами привода является сошка 3, продольная тяга 5, рычаг поворотной цапфы и трапеция, образованная боковыми рычагами и поперечной тягой. Длина поперечной рулевой тяги может регулироваться (резьбовое соединение), что позволяет регулировать схождение колес. Штриховыми линиями на рисунке 1, а показано положение рулевого привода при повороте рулевого колеса на угол Θ. Сошка при этом повернулась на угол Ω, а управляемые колеса повернулись: внутренние на угол β, внешние – на угол α. Шарниры 1 и 2 поперечной разрезной тяги лежат на продолжении осей качения колес. Сошки 3 и 4 определяют правильную кинематику перемещения среднего звена 5 поперечной тяги.
Рулевой механизм (рисунок 1, а) включает в работу распределительное устройство гидроусилителя РУ и осуществляет слежение за поворотом колес. Их поворот происходит под действием силового цилиндра СЦ, к которому подводится высокое давление от насоса Н. Он питается из бака Б.
4
Рис. 1: Схемы рулевых приводов
5
Основной задачей кинематического расчета является определение оптимальных параметров рулевой трапеции. При этом считают, что оси поворота колес или шкворней вертикальны. Чтобы на повороте движение АТС не сопровождалось боковым скольжением колес, траектория качения всех колес должна иметь единый мгновенный центр О. Для этого необходимо выполнить условие
ctgα −ctgβ = |
l |
, |
(1) |
|
L |
||||
|
|
|
где α – угол поворота наружного колеса; β – угол поворота внутреннего колеса; l – колея шкворней;
L – база автомобиля.
В точке О должны пересекаться продолжения осей всех колес. Однако трапеция работает удовлетворительно, когда точка пересечения осей управляемых колес при углах α и β отстоит на некотором расстоянии La < L от передней оси. Отношение La/L = λ и чем ближе к 1 данное соотношение, тем совершеннее трапеция.
Величину λ можно определить по выражению |
|
|||
λ= |
l |
sinβ sinα / sin(β −α) . |
(2) |
|
L |
||||
|
|
|
||
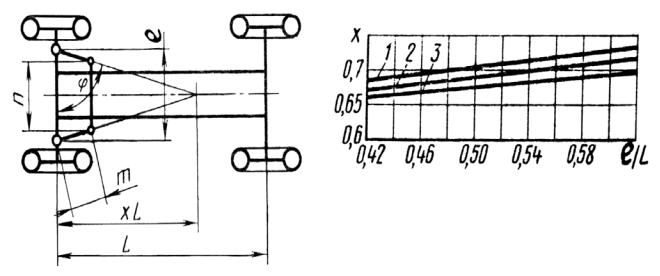
Рис. 2: Схема рулевой трапеции и зависимость х от l/L; 1 – 3 при m/n, равном 0,12; 0,14; 0,16
6
При графическом кинематическом расчете и выбранной схеме рулевой трапеции следует изобразить в масштабе в РПЗ и на листе формата А1 миллиметровой бумаги в левом верхнем углу схему АТС (опираясь на данные прототипов) и трапеции при нейтральном положении управляемых колес (рисунок 2 с размерами). (На листе это будет рисунок 1 – кинематика поворота АТС).
После этого задаются величинами l/L = 0,48…0,62; m/n = =0,12…0,16, х=0,7 при заднем расположении трапеции, х=1,0 при переднем расположении [1]. Можно использовать график рисунка 2 данных методических указаний. Рекомендуется использовать практические соотношения: для m/n= =0,12 отношение l/L = 0,48; для m/n = 0,14 отношение l/L = 0,54; для m/n = 0,16 отношение l/L = 0,62 [1].
Кроме того, определяют углы наклона боковых рычагов к передней
оси АТС φ, длину поперечной тяги n |
l |
|
|
|||||
ϕ =arcctg |
; |
|||||||
2xl |
||||||||
|
|
|
|
|
(3) |
|||
|
|
|
l |
|
||||
n = |
|
|
|
|
|
|||
|
|
m |
|
|
|
|
||
1 |
+2 |
cosϕ |
||||||
|
||||||||
|
|
|
n |
|
|
|
||
Затем, задаваясь углом поворота β = 10о, 20о, 30о, 40о, βmax , определяют графики на листе, зная кинематику трапеции, углы поворота
наружного колеса α. Целесообразно все данные свести в таблицу следующей формы
Таблица 1 – Углы поворота управляемых колес |
|
|
|||||
βо |
10 |
20 |
30 |
40 |
|
……. |
βmax |
α |
− |
− |
− |
− |
|
− |
− |
λ |
− |
− |
− |
− |
|
− |
− |
Величину λ определяют либо по формуле (2), либо по результатам графического построения, деля La на L. Величина βmax может быть определена, если использовать имеющиеся в технической характеристике
7
прототипов значения наименьшего радиуса поворота наружного колеса
Rн min.
При этом
sinαmax = |
L |
. |
(4) |
|
|||
|
Rнmin |
|
|
А соотношение между αmax и βmax определяется как |
|
||
αmax + βmax ≤70% . |
(5) |
||
Отсюда определяют βmax . |
|
|
|
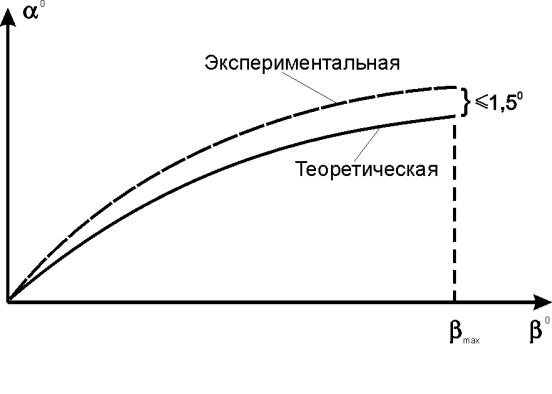
Затем на листе (и в РПЗ) под рисунком 1 строят график λ = f(β) (на листе это рисунок 2 – Параметры рулевой трапеции). На этом графике должна быть проведена линия λ = 1,0. Чем ближе полученный график к прямой λ= 1,0, тем совершеннее трапеция. В противном случае следует изменить отношения m/n, l/L и графический расчет повторить. О качестве трапеции можно судить и по графику α = f(β) (его строят на листе, это рисунок 3 – Зависимость углов поворота управляемых колес) и в РПЗ.
Рис. 3: Зависимость углов поворота управляемых колес

8
Теоретическая кривая строится с использованием формулы (1) (при этом известные величины l / L , β ), экспериментальная – по результа-
там графических построений. Если при βmax расхождение не превы-
шает 1,5о, то конструкция рулевой трапеции признается удовлетворительной.
6.2 Определение параметров управляемости АТС
Управляемость АТС – это свойство подвижности, определяющее возможность для водителя двигаться по заданной траектории, и потому она, наряду с другими свойствами, в значительной мере определяет уровень активной безопасности, а также маневренности. Последнее свойство характеризует способность АТС двигаться на ограниченной площади и в основном характеризуется габаритными размерами АТС, максимальными углами поворота управляемых колес. Поскольку ранее были определены углы αmax и βmax , это дает простую возможность
определить величину среднего максимального угла поворота
Θср.max = |
αmax +βmax . |
(6) |
|
2 |
|
Однако определяющим параметром управляемости по условиям безопасности является критическая по условиям увода скорость движения
Vкр.δ = |
|
М2 |
L |
|
, |
(7) |
|
|
|||||||
|
|
− |
М1 |
|
|
|
|
|
|
|
Кδ1 |
|
|||
|
|
Кδ2 |
|
||||
где М1 и М2 – массы, приходящиеся на передний и задний мост, кг; Кδ1 и Кδ2 – соответственно коэффициенты сопротивления уводу
передних и задних колес.
Коэффициенты сопротивления уводу ориентировочно можно оп-
ределить по эмпирической зависимости |
|
Кδ = 780 (dш + 2Вш) Вш (pw + 98), |
(8) |
где dш – внутренний диаметр шины, м; Вш – ширина профиля шины, м; pw − давление воздуха в шине, кПа.
9
Если скорость – мнимая величина (отрицательное подкоренное выражение), то это свидетельствует о недостаточной поворачиваемости АТС, если она бесконечно большая величина – поворачиваемость нейтральная, если скорость имеет определенное значение – поворачиваемость избыточная. В этом случае для обеспечения безопасности движения необходимо выполнение условия
Vкр.δ >Vmax . |
(9) |
Если оно не выполняется, необходимо предложить мероприятия по изменению конструктивных параметров АТС (перераспределение М1 и М2 по мостам, изменение Kβ и так далее).
Все параметры по управляемости и выводы следует вынести на лист графической части. Для этого следует написать название параметра, формулу, цифры для проектируемого АТС, результат, выводы.
6.3 Определение параметров устойчивости АТС
Устойчивость, как никакое свойство подвижности, влияет на безопасность движения, поэтому в данной работе необходимо определить некоторые ее параметры для проектируемого АТС и результаты также вынести на лист. Для решения поставленной задачи следует воспользоваться материалом, изложенным в первой части курсового проекта [3].
Критическая скорость по условиям поперечного скольжения колес Vкр. с. определяется по формуле (5.1) с использованием таблицы 5.1 [3], критическая по условиям бокового опрокидывания скорость – формула (5.2) и таблица 5.2. Для обеспечения безопасности движения желательно, чтобы критическая скорость по опрокидыванию была больше, чем скорость по скольжению. Кроме того, определяется коэффициент поперечной устойчивости (формула 5.3) [3], который должен быть не менее 1,0, предельный угол подъема (формула 5.4) [3], который должен быть не меньше коэффициента сцепления. В любом случае, если условия безопасности не удовлетворяются, необходимо предложить конструктивные мероприятия для обеспечения требуемых условий. При расчетах высота центра масс hg принимается равной диаметру колес у легковых автомобилей и АТС на их базе, у грузовых и автобусов высота принимается равной погрузочной высоте у АТС.