

Н.П. Курышкин Теория механизмов и машин. Программа, методические указания и контрольные задания для студентов заочной формы обучения специальностей 120100, 120200, 170100, 170500
.pdfМинистерство образования Российской Федерации Государственное учреждение
Кузбасский государственный технический университет
Кафедра прикладной механики
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Программа, методические указания и контрольные задания для студентов заочной формы обучения специальностей 120100, 120200, 170100, 170500
Разработал Н.П. Курышкин
Утверждены на заседании кафедры Протокол № 2 от 28.10.02
Рекомендованы к печати учебнометодической комиссией специальности 120100 Протокол № 10 от 31.10 .02
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
ОБЩИЕ СВЕДЕНИЯ
Курс теории механизмов и машин, рассматривающий общие методы исследования и проектирования механизмов и машин, входит в общетехнический цикл дисциплин, формирующий знания инженеров по конструированию, изготовлению и эксплуатации механизмов и машин.
Большое значение имеет курс для подготовки инженеровмехаников, так как знание видов механизмов, их структурных, кинематических и динамических свойств необходимо для понимания принципов работы как отдельных механизмов, так и их взаимодействия в машине.
Теория механизмов и машин является основой для последующего изучения специальных дисциплин, посвящённых проектированию, изготовлению и эксплуатации машин различных отраслей техники.
Учебная работа по изучению курса включает усвоение теоретического материала по учебникам, решение задач контрольной работы, выполнение курсового проекта (если это предусмотрено учебным планом) и сдачу зачёта или экзамена. При работе с учебником обязательно составлять конспект, в котором записывать основные положения и выводы теории. После изучения соответствующих разделов курса целесообразно разобрать примеры решения типовых задач, помещённых в сборнике задач по теории механизмов и машин, и самостоятельно решить ряд задач (список литературы см. ниже). Выполненная контрольная работа высылается на кафедру для рецензирования. Задания на курсовой проект и методические указания по его выполнению выдаются на кафедре дополнительно.
Во время сессии читаются лекции по основным разделам курса и выполняются лабораторные работы. К зачёту или экзамену допускаются студенты, сдавшие и защитившие контрольную работу и выполнившие лабораторные работы.
2
ПРОГРАММА
Основные понятия теории механизмов и машин. Предмет нау-
ки. Определение машины, механизма, звена механизма, кинематической пары. Виды машин, механизмов, звеньев, кинематических пар.
Структурный анализ и синтез механизмов. Число степеней сво-
боды механизма, структурная формула механизма. Избыточные связи в механизмах. Синтез механизмов без избыточных связей. Структурная формула для плоской модели механизма. Группы Ассура. Структурный синтез по Ассуру. Синтез рычажных механизмов по положениям звеньев и по методу приближения функций. Синтез направляющих механизмов. Методы оптимизации в синтезе механизмов с применением ЭВМ.
Кинематический анализ рычажных механизмов. Задачи кине-
матического анализа механизмов. Определение скоростей и ускорений разложением движения (построением планов скоростей и ускорений) для двухзвенных групп Ассура. Метод векторных контуров. Определение координат. Определение скоростей и ускорений. Метод преобразования координат. Уравнения преобразования координат в пространстве. Матричная форма преобразования.
Кинематический анализ зубчатых механизмов. Классификация.
Определение передаточных отношений в механизмах с неподвижными осями колёс – рядовых и ступенчатых. Планетарные механизмы: картина линейных и угловых скоростей; аналитическое определение передаточного отношения. Дифференциалы: графическое и аналитическое определение скорости выходного звена замкнутого дифференциала.
Кинематический анализ и синтез зубчатых зацеплений. Плос-
кое зацепление. Основная теорема зацепления. Центроиды зацепления. Эвольвента окружности и её свойства. Уравнения эвольвенты. Элементы и свойства эвольвентного зацепления. Методы образования зубьев: метод копирования, метод обката. Исходный контур. Модуль. Параметры колеса, образованного производящей рейкой: радиус делительной и основной окружностей; радиус окружности впадин; минимальное число зубьев и минимальное смещение из условия неподрезания ножки зуба; толщина зуба по делительной и произвольной окружности. Параметры зацепления: инволюта угла зацепления; межцентровое расстояние; радиусы окружностей вершин зубьев; коэффициент перекрытия. Блокирующие контуры.
Цилиндрические косозубые зацепления: образование эвольвентного зацепления; торцевой и нормальный модуль; коэффициент перекры-
3
тия; образование зацепления Новикова. Червячное зацепление: образование зацепления; виды червяков.
Анализ и синтез кулачковых механизмов. Виды кулачковых ме-
ханизмов и их параметры. Кинематический анализ кулачковых механизмов. Угол давления кулачковых механизмов, определение радиуса начальной окружности кулачка. Профилирование кулачка. Выбор закона движения толкателя кулачкового механизма.
Динамический анализ и синтез механизмов. Силовой расчёт по заданному движению механизма. Определение сил инерции. Обоснование необходимости расчёта по группам Ассура. Расчёт двухзвенных групп. Теорема Жуковского. Проверка силового расчёта с помощью «рычага Жуковского».
Приведение сил и масс. Уравнение движения звена приведения в интегральной и дифференциальной форме. Определение скорости звена приведения по диаграмме Виттенбауэра. Условие установившегося движения. Коэффициент неравномерности движения звена приведения. Анализ факторов, влияющих на неравномерность, определение момента инерции маховика.
Уравновешивание вращающихся звеньев. Балансировка жёстких роторов. Статическое замещение масс. Статическое уравновешивание рычажных механизмов.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Основная литература
1.Левитская О.Н. и Левитский Н.И. Курс теории механизмов и машин. -
М.: Высш. шк., 1985.-279 с.
2.Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988.-
638с.
3.Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории механизмов и машин. - М.: Наука, 1973.-254 с.
Дополнительная литература
1.Теория механизмов и машин / К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. - М.: Наука, 1987.-375 с.
2.Ермак В. Н. Лекции по теории механизмов и машин: Учеб. пособие / Кузбас. гос. техн. ун-т.– Кемерово, 1999.- 218 с.
4
КОНТРОЛЬНАЯ РАБОТА
Контрольная работа состоит из четырёх задач. В первой проводится структурный анализ и синтез четырёхзвенного механизма, во второй - определяется передаточное отношение планетарного зубчатого механизма аналитически и графически, в третьей - выполняется кинематический анализ четырёхзвенного рычажного механизма методом планов скоростей и ускорений, в четвёртой - производится динамический анализ (силовой расчёт) того же механизма.
Вариант кинематической схемы механизма выбирается по последней цифре шифра зачётной книжки студента, а вариант числовых данных определяется предпоследней цифрой шифра.
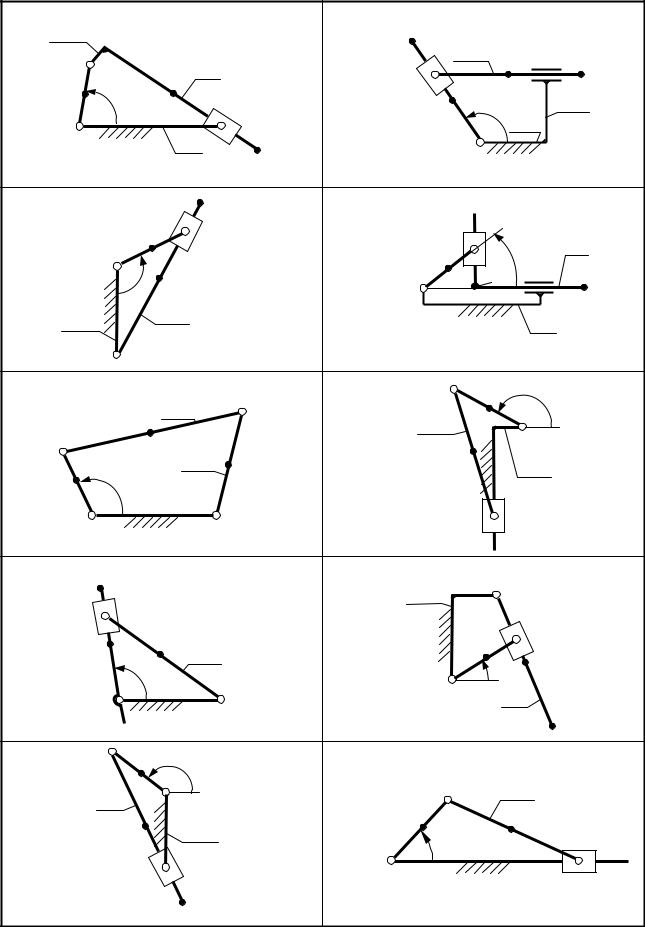
Задача №1
Определить число избыточных связей рычажногомеханизма(табл. 1) и устранить их алгебраическим методом; представить новую схему того же механизма без избыточных связей (в табл.1 размеры звеньев и центры масс Si указаны для задач №3 и №4). Схему начертить при любом значении угла ϕ1.
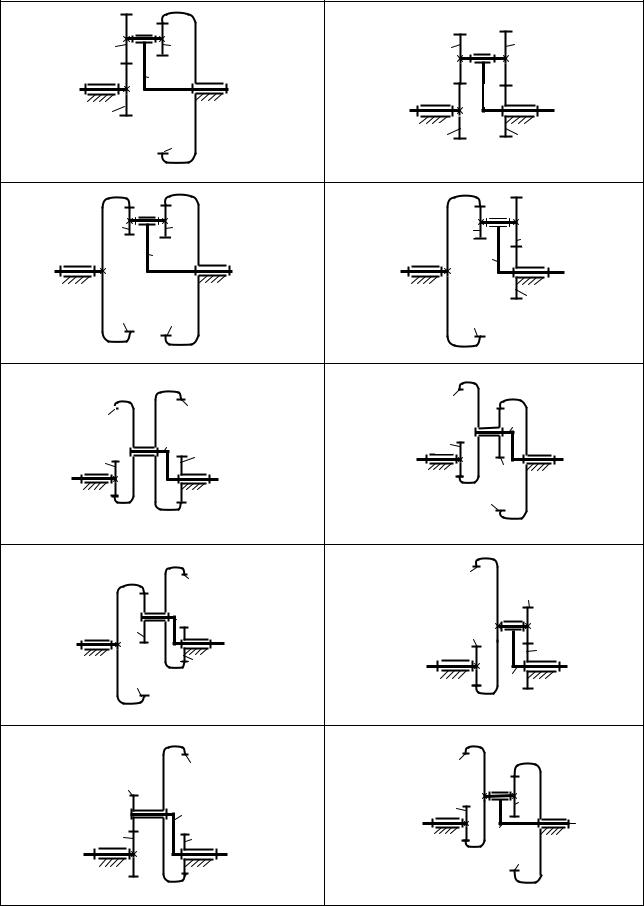
Задача №2
Определить передаточное отношение u1H планетарного механизма (табл. 2), если заданы числа зубьев всех зубчатых колёс (табл. 3). Результат проверить графически с помощью картины распределения линейных скоростей, считая, что все колёса изготовлены с нулевым смещением. Модуль всех колёс - 5 мм.
Задача №3
Для схемы механизма задачи №1 методом планов определить:
-скорости и ускорения всех обозначенных точек;
-угловые скорости и ускорения всех звеньев.
Центры масс звеньев находятся на их середине. Длина кривошипа АВ во всех заданиях - 0,1 м, его угловая скорость ω1=10 с-1, угловое ускорение ε1=200 с-2. Размеры звеньев, приведённые на схеме, представлены в метрах. Положение кривошипа определяется углом ϕ1 (табл. 4).
5
Таблица 1
0 |
0,03 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
0,15 S3 |
E С |
||||
|
B |
|
|
|
|
0,3 |
|
|
|
||||||
|
|
|
|
S2 |
|
|
D |
|
|||||||
|
S1 |
ϕ1 |
|
|
|
|
|
|
|
|
|
0,06 |
|||
|
|
|
|
|
D |
|
S1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
A |
|
|
|
0,2 |
С |
|
|
|
A |
ϕ1 0,05 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
|
|
|
С |
|
3 |
|
|
|
|
|
|
|
|
|
|
S1 |
|
B |
|
|
|
S1 |
B |
|
|
ϕ1 |
0,2 |
|
|
|
A ϕ1 |
|
S3 |
|
|
|
A |
|
S3 |
D |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
||
|
0,15 |
|
|
0,25 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
0,2 |
||||
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
S2 |
0,25 |
С |
5 |
|
B |
S1 |
ϕ1 |
|||||
|
|
|
|
0,25 |
|
|
|||||||||
|
B |
|
|
|
|
|
|
|
A |
||||||
|
|
|
|
0,15 |
|
|
|
|
S2 |
|
|
||||
|
|
ϕ1 |
|
S3 |
|
|
|
|
|
0,03 |
|||||
|
S1 |
|
|
|
|
|
|
|
|||||||
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|||
|
A |
|
|
|
D |
|
|
|
C |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
6 |
B |
|
|
|
|
|
7 |
0,15 |
0,03 |
D |
|
||||
|
|
|
|
|
|
|
|
||||||||
|
С |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
S3 |
|
|
|
|
|
S1 |
|
|
B |
|||
|
|
S1 |
ϕ |
|
0,15 |
|
|
|
|
|
|||||
|
|
1 |
|
|
A |
ϕ1 |
S3 |
||||||||
|
|
|
|
0,1 |
|
|
|
|
|
|
|||||
|
|
A |
|
|
|
D |
|
|
|
|
|
0,3 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
С |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
B |
S1 |
|
ϕ1 |
|
9 |
|
B |
|
|
|
0,25 |
||
|
|
0,3 |
|
A |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
S1 |
|
|
|
|
S2 |
||||
|
|
|
S2 |
|
0,15 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ϕ1 |
|
|
|
C |
||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|||
|
|
|
D |
|
|
|
|
|
|
|
|
|
|||
|
|
|
С |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
Таблица 2
0 |
|
1 |
z2′ |
|
z2 |
z2′ |
z2 |
||
|
H |
|
H |
|
z1 |
|
|
||
z3 |
z1 |
z3 |
||
|
||||
2 |
|
3 |
|
|
z2 |
z2′ |
z2 |
z2′ |
|
|
H |
|
H |
|
z1 |
z3 |
|
z3 |
|
z1 |
||||
4 |
|
5 |
|
|
z2 |
z2′ |
z2 |
H |
|
z1 |
||||
z1 |
H z3 |
z2′ |
||
|
|
|
||
|
|
|
z3 |
|
6 |
|
7 |
|
|
|
z2′ |
z2 |
z2′ |
|
|
|
|||
|
H |
|
||
z2 |
z1 |
|
||
z3 |
z3 |
|||
|
|
|||
z1 |
|
H |
||
|
|
|||
8 |
|
9 |
|
|
z2 |
z2′ |
z2 |
|
|
H |
z1 |
z2′ |
||
|
||||
z1 |
z3 |
|
H |
|
|
|
|
z3 |
7
Таблица 3
Номер |
Обозна- |
|
|
|
Вариант числовых данных |
|
|
|
|||||
схемы |
чение |
0 |
1 |
2 |
|
3 |
4 |
5 |
6 |
|
7 |
8 |
9 |
|
z1 |
15 |
17 |
16 |
|
19 |
21 |
20 |
24 |
|
18 |
25 |
17 |
0 |
z2 |
17 |
25 |
18 |
|
24 |
20 |
21 |
19 |
|
16 |
17 |
15 |
z2’ |
14 |
22 |
15 |
|
21 |
17 |
18 |
16 |
|
13 |
14 |
12 |
|
|
|
|
|||||||||||
|
z3 |
46 |
64 |
49 |
|
64 |
58 |
59 |
59 |
|
47 |
56 |
44 |
|
z1 |
24 |
27 |
22 |
|
26 |
20 |
28 |
30 |
|
36 |
34 |
32 |
1 |
z2 |
21 |
19 |
16 |
|
17 |
15 |
20 |
24 |
|
18 |
25 |
17 |
|
z2’ |
25 |
23 |
20 |
|
21 |
19 |
24 |
28 |
|
22 |
29 |
21 |
|
z3 |
20 |
23 |
18 |
|
22 |
16 |
24 |
26 |
|
32 |
30 |
28 |
|
z1 |
48 |
50 |
52 |
|
54 |
40 |
56 |
60 |
|
46 |
62 |
64 |
2 |
z2 |
18 |
16 |
17 |
|
19 |
12 |
19 |
16 |
|
17 |
20 |
21 |
|
z2’ |
20 |
19 |
20 |
|
23 |
15 |
21 |
18 |
|
20 |
24 |
25 |
|
z3 |
50 |
53 |
55 |
|
58 |
43 |
58 |
62 |
|
49 |
66 |
68 |
|
z1 |
59 |
59 |
47 |
|
56 |
44 |
58 |
64 |
|
49 |
46 |
64 |
3 |
z2 |
18 |
16 |
13 |
|
14 |
12 |
17 |
21 |
|
15 |
14 |
22 |
|
z2’ |
21 |
19 |
16 |
|
17 |
15 |
20 |
24 |
|
18 |
17 |
25 |
|
z3 |
20 |
24 |
18 |
|
25 |
17 |
21 |
19 |
|
16 |
15 |
17 |
|
z1 |
17 |
18 |
20 |
|
19 |
17 |
15 |
16 |
|
21 |
24 |
25 |
4 |
z2 |
50 |
54 |
60 |
|
61 |
58 |
62 |
46 |
|
64 |
67 |
70 |
|
z2’ |
55 |
60 |
65 |
|
70 |
74 |
72 |
54 |
|
71 |
78 |
80 |
|
z3 |
22 |
24 |
25 |
|
28 |
33 |
25 |
24 |
|
28 |
35 |
35 |
|
z1 |
24 |
16 |
17 |
|
20 |
17 |
25 |
21 |
|
15 |
19 |
18 |
5 |
z2 |
40 |
36 |
35 |
|
42 |
38 |
52 |
45 |
|
34 |
41 |
38 |
|
z2’ |
28 |
20 |
24 |
|
25 |
22 |
30 |
27 |
|
21 |
29 |
25 |
|
z3 |
44 |
40 |
42 |
|
47 |
43 |
57 |
51 |
|
40 |
51 |
45 |
|
z1 |
40 |
57 |
47 |
|
40 |
44 |
42 |
43 |
|
51 |
45 |
51 |
6 |
z2 |
21 |
30 |
25 |
|
20 |
28 |
24 |
22 |
|
27 |
25 |
29 |
|
z2’ |
34 |
52 |
42 |
|
36 |
40 |
35 |
38 |
|
45 |
38 |
41 |
|
z3 |
15 |
25 |
20 |
|
16 |
24 |
17 |
17 |
|
21 |
18 |
19 |
|
z1 |
21 |
20 |
23 |
|
20 |
28 |
14 |
22 |
|
17 |
25 |
29 |
7 |
z2 |
64 |
59 |
66 |
|
59 |
69 |
57 |
64 |
|
56 |
58 |
64 |
|
z2’ |
25 |
17 |
24 |
|
18 |
21 |
20 |
16 |
|
19 |
15 |
17 |
|
z3 |
18 |
22 |
19 |
|
21 |
20 |
23 |
26 |
|
20 |
18 |
18 |
|
z1 |
18 |
26 |
20 |
|
19 |
18 |
18 |
20 |
|
23 |
21 |
22 |
8 |
z2 |
15 |
16 |
21 |
|
24 |
25 |
17 |
19 |
|
20 |
18 |
17 |
|
z2’ |
58 |
64 |
69 |
|
66 |
64 |
64 |
56 |
|
57 |
59 |
59 |
|
z3 |
25 |
22 |
28 |
|
23 |
21 |
29 |
17 |
|
14 |
20 |
20 |
|
z1 |
17 |
14 |
20 |
|
21 |
23 |
28 |
22 |
|
25 |
29 |
20 |
9 |
z2 |
47 |
64 |
56 |
|
58 |
64 |
64 |
59 |
|
66 |
59 |
69 |
|
z2’ |
20 |
18 |
17 |
|
22 |
19 |
21 |
16 |
|
23 |
17 |
22 |
|
z3 |
50 |
68 |
53 |
|
59 |
60 |
57 |
53 |
|
64 |
47 |
71 |
8
Задача №4
Используя исходные данные и результаты решения задачи №3, произвести силовой расчёт механизма:
-определить реакции во всех кинематических парах;
-найти уравновешивающий (движущий) момент, приложенный к кривошипу;
-проверить правильность силового расчёта с помощью «рычага Жуковского».
Во всех заданиях силу полезного сопротивления Fпс=80 Н приложить к выходному звену в точке C и направить в сторону, противоположную скорости этой точки. Массы и моменты инерции звеньев относительно центров масс принять равными соответственно:
-кривошипа m1=3 кг, JS1=0,005 кг м2;
-других звеньев-рычагов (шатуна, кулисы, коромысла) mi=6 кг, JSi=0,01 кг м2;
-ползуна или кулисного камня mi=0,5 кг, JSi=0.
Таблица 4
Номер |
|
Значение ϕ1 в градусах для варианта числовых данных |
|
|||||||
схемы |
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
30 |
70 |
90 |
120 |
150 |
200 |
230 |
270 |
290 |
330 |
1 |
60 |
65 |
70 |
75 |
80 |
95 |
100 |
110 |
115 |
120 |
2 |
30 |
90 |
120 |
150 |
200 |
230 |
250 |
270 |
190 |
330 |
3 |
30 |
45 |
60 |
120 |
150 |
200 |
220 |
240 |
300 |
330 |
4 |
60 |
90 |
110 |
120 |
140 |
160 |
180 |
250 |
270 |
300 |
5 |
30 |
90 |
100 |
120 |
140 |
160 |
200 |
270 |
300 |
330 |
6 |
30 |
90 |
100 |
110 |
120 |
140 |
160 |
190 |
200 |
220 |
7 |
0 |
60 |
90 |
150 |
180 |
200 |
220 |
240 |
270 |
300 |
8 |
0 |
30 |
60 |
100 |
120 |
150 |
180 |
200 |
250 |
290 |
9 |
30 |
45 |
60 |
110 |
140 |
170 |
200 |
230 |
300 |
330 |
Составитель Николай Петрович Курышкин
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Программа, методические указания и контрольные задания для студентов заочной формы обучения специальностей 120100, 120200, 170100, 170500
Редактор Е.Л. Наркевич
ИД №06536 от 16.01.02. Подписано в печать 01.11.02.
Формат 60х84/16. Бумага офсетная.
Отпечатано на ризографе. Уч.- изд. л. 0,5. Тираж 300 экз. Заказ ГУ Кузбасский государственный технический университет. 650026, Кемерово, ул. Весенняя, 28.
Типография ГУ Кузбасский государственный технический университет. 650099, Кемерово, ул. Д. Бедного, 4 а.