

Н.П.Курышкин Планы скоростей и ускорений
.pdfМинистерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра прикладной механики
ПЛАНЫ СКОРОСТЕЙ И УСКОРЕНИЙ
Методические указания к практическому занятию по теории механизмов и машин для студентов направлений 552900, 551800, 551400
Составитель Н.П.Курышкин
Утверждены на заседании кафедры Протокол № 2 от 5 ноября 1999г.
Рекомендованы к печати учебно - методической комиссией направления 552900 Протокол № 237 от 15 ноября 1999г.
Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2000

1
1. ЦЕЛЬ И СОДЕРЖАНИЕ ЗАНЯТИЯ
Цель занятия - практическое освоение методики кинематического анализа механизмов методом планов скоростей и ускорений.
Для предложенной схемы рычажного механизма по заданному движению входного звена необходимо определить скорости и ускорения всех шарнирных точек и центров масс звеньев. Требуется также определить угловые скорости и угловые ускорения всех звеньев.
2. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
Планы скоростей и ускорений представляют собой средство графического решения задачи о скоростях и ускорениях в механизме. Решение основано на разложении абсолютного движения какого-либо звена на некоторое переносное и относительное.
Переносным называется движение подвижной системы координат (ПСК) относительно неподвижной. ПСК искусственно вводится в механизм и связывается с каким-либо звеном или точкой звена, выбирается то звено или точка, движение которых (скорость и ускорение) уже известно. Относительным называется движение рассматриваемой точки (или звена) относительно ПСК. Переносное движение необходимо за-
давать таким, чтобы относительное движение звена, на котором лежит рассматриваемая точка, было простейшим - поступательным или вращательным.
Абсолютная скорость и ускорение при таком составном движении определяются по формулам:
|
|
|
|
|
vабс |
= |
vпе р+ |
vотн |
, |
|
|
|
(2.1) |
|||||||
|
|
|
|
|
|
a |
|
= |
|
a |
|
+ |
|
a |
+ |
|
a |
|
, |
|
|
|
|
|
|
|
абс |
|
пе р |
|
|
ко р |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
отн |
|
|
|
|
||||
где vпе р |
и |
a |
пе р |
- скорость и ускорение той точки ПСК, которая в дан- |
||||||||||||||||
ный момент совпадает с рассматриваемой; |
|
|||||||||||||||||||
vотн |
и aотн |
- скорость и ускорение рассматриваемой точки относи- |
||||||||||||||||||
тельно ПСК; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
a |
ко р |
- ускорение Кориолиса. |
|
|
|
|
|
|||||||||||||
Графическое решение уравнений (2.1) называется планом скоростей и (или) планом ускорений соответственно. Напомним, что векторные уравнения разрешимы, если содержат не более двух неиз-
2
вестных. При этом надо учитывать не только модули, но и линии действия векторов.
Кинематический анализ механизмов ведется в порядке присоединения групп Ассура. Рассмотрим два примера.
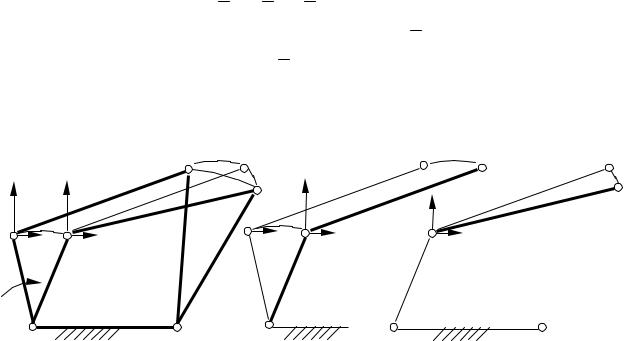
Пример 1. Дан шарнирный четырехзвенник с известной угловой скоростью и ускорением звена 1 (рис.1, а). Для изображенного положения требуется определить скорость и ускорение точек A и B.
По условию задачи следует, что звено 1 - начальное. Тогда цепь 2- 3 - первая и единственная группа Ассура. Скорости и ускорения точек внутри группы Ассура можно определить только в том случае, если известны скорости и ускорения мест присоединения группы в механизме. В нашем примере это точки А и С.
Скорость и ускорение точки A определяется непосредственно по
исходным данным: |
|
= |
ω 1 OA, м/с; |
|
|||||
vA |
(2.2) |
||||||||
anA |
= |
ω 12 OA, м/с2 ; |
(2.3) |
||||||
aτ |
|
= |
ε OA, м/с2 ; |
(2.4) |
|||||
A |
= |
1 |
n+ |
|
|
|
|
|
|
a |
A |
a |
a |
τ . |
(2.5) |
||||
|
|
A |
A |
|
|||||
Напомним, что нормальное ускорение |
a |
An |
направлено к центру |
||||||
вращения O, а |
тангенциальное aAτ |
- перпендикулярно OА и направлено |
||||||
в сторону ε 1 . |
|
|
|
|
|
|
||
|
y |
2 |
B |
B′ |
y |
B |
B′ |
B′ |
y |
|
B′′ |
y |
|
B′′ |
|||
|
|
|
|
|
|
|
||
A |
x |
A′ x |
3 |
A x |
A′ x |
А′ |
x |
|
1 |
|
|
|
|
|
|
|
|
O |
|
|
|
C |
|
|
|
|
|
|
а) |
|
б) |
|
в) |
|
|
|
Рис. 1. К анализу движений в шарнирном четырехзвеннике |
|
||||||
|
Таким образом, скорости и |
ускорения мест присоединения груп- |
||||||
пы 2-3 известны (скорость и ускорение точки А только что найдены, а точки С - равны нулю). Для определения скорости и ускорения точ-
3
ки внутри группы Ассура - точки B - введем ПСК Axy, связав ее начало с точкой A и заставив двигаться поступательно. Представим, что абсолютное движение звена 2 (рис.1, а) складывается из поступательного переносного с системой Axy (рис.1, б) и вращательного относительно
Axy (рис.1, в).
В переносном движении точка B описывает траекторию BB', а в относительном - траекторию B'B". Так как переносное движение поступательное, то точка B в этом движении повторит траекторию точки A, и, следовательно, скорости и ускорения этих точек одинаковы.
На этом основании в формулах (2.1): vпе р = vA и aпе р = a A . Скорость и ускорение на траектории относительного движения В′В′′ обозначим как vВA и аВA . Тогда для нашего примера уравнения (2.1) будут иметь вид
vB |
= |
vA+ |
vBA ; |
|
|
(2.6) |
|||
a |
B |
= |
a |
+ |
a |
+ |
a |
ко р . |
(2.7) |
|
|
A |
BA |
BA |
|
||||
Решение этих уравнений не рассматриваем, т.к. в п. 3 будет разобран более общий случай.
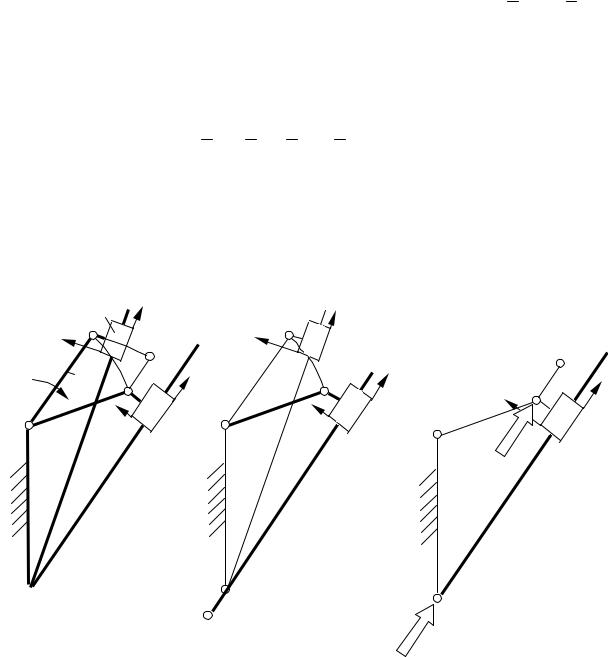
Пример 2. Дан кулисный механизм (рис.2, а) с известной угловой скоростьюиускорениемкривошипа1. Определить скорость и ускорение точек А1, А2,
А3 .
A |
2 x |
|
A |
x |
|
|
|
y |
A′′ |
y |
|
|
|
|
A′′ |
1 |
A′ |
x |
|
A′ |
x |
y A′ |
x |
|
y |
|
|
y |
|||
O |
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
C 
а) б) в)
Рис.2. К анализу движений в кулисном механизме

4
Как и в предыдущем примере, звено 1 - начальное, цепь 2-3 - группа Ассура. Скорость и ускорение шарнира А (точек А1 , А2 ) определяется поформулам(2.2), ..., (2.5). Скоростьиускорениеточки С равны нулю.
Требуется определить скорость и ускорение точки A3 . Эта точка неизменно связана со звеном 3 и совпадает в данный момент с шарниром А (рис.2, а).
Введем ПСК xy, которую свяжем с кулисным камнем 2. Абсолютное движение звена 3 представим состоящим из плоскопараллельного переносного с системой xy (рис.2, б) и прямолинейного поступательно-
го относительно xy (рис.2, в). |
В переносном движении точка A3 |
опи- |
||||||||
сывает траекторию АА' (дугу |
окружности с центром в точке О), а |
|||||||||
в относительном движении - |
траекторию А'А'' , параллельную звену |
|||||||||
3. В абсолютном движении |
точка |
А3 |
описывает дугу окружности |
|||||||
АА'' с центром в точке С. |
|
|
|
|
|
|
|
|
|
|
Из принятого разложения движения вытекают следующие форму- |
||||||||||
лы скоростей и ускорений точки А3: |
|
|
|
|
|
|||||
vA |
= |
vA |
+ |
vA 2 ; |
|
|
(2.8) |
|||
|
3 |
|
|
2 |
|
3 |
|
|
|
|
a |
A3 |
= |
a |
A2 |
+ |
a |
+ |
a |
ко р . |
(2.9) |
|
|
|
|
|
A3 2 |
|
A3 2 |
|
||
Решение этих уравнений также не рассматриваем.
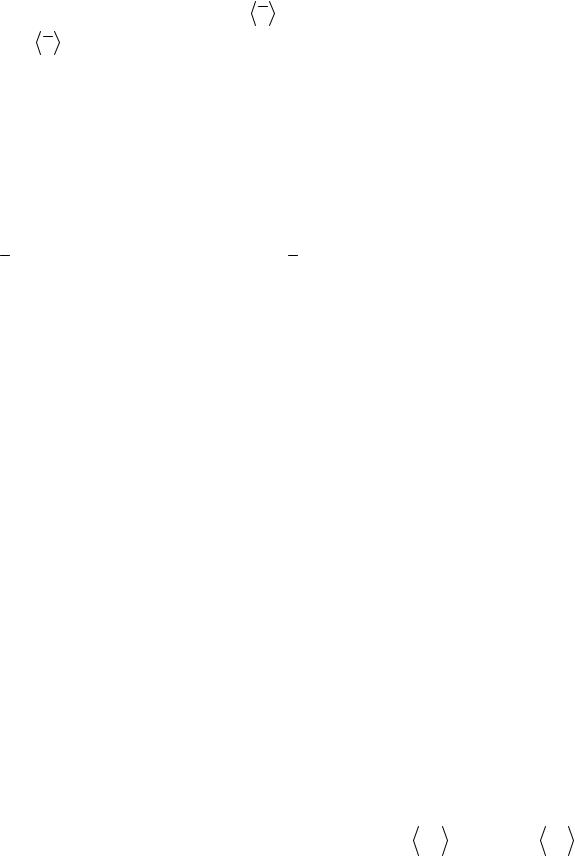
Во многих случаях для решения уравнений вида (2.1) одного разложения абсолютного движения оказывается недостаточно (это бывает тогда, когда число неизвестных больше двух). В этом случае используют еще одно разложение и получают систему двух векторных уравнений с четырьмя неизвестными, которая для групп Ассура всегда разрешима. Ниже в табл. 1 представлены все варианты двухповодковых групп Ассура и уравнения для определения скоростей и ускорений.

5
Таблица 1
Группы Ассура и векторные уравнения
№ |
Группа Ассура |
|
|
|
Скорости |
|
|
|
|
|
Ускорения |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
! |
|
= |
! |
|
|
! |
|
|
|
! |
|
|
= |
|
! |
|
+ |
! |
|
|
|
! |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vB |
vA+ |
|
vBA |
|
a |
|
|
a |
|
|
a n+ |
a |
τ |
|
||||||||||||||||
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
! |
|
|
! |
|
|
! |
|
|
|
!B |
|
|
!A |
!BA |
|
!BA |
||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vB |
= |
vC+ |
|
vBC |
a |
|
|
= |
a |
|
|
+ |
a n + |
a |
τ |
|
|||||||||||||||
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
C |
|
|
|
BC |
|
|
BC |
|||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
y3 3 |
|
|
|
|
x3 |
! |
|
= |
! |
|
|
! |
|
|
! |
|
|
|
= |
! |
|
|
+ |
! |
|
+ |
|
! |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
vC |
vA+ |
|
vC A |
a |
C |
|
|
a |
|
|
a n |
|
aτ |
|
||||||||||||||||||||||
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
2 |
|
! |
|
|
! |
2 |
|
|
|
|
|
|
A |
|
|
C A |
|
|
C A |
||||||||
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
= |
|
+ |
|
! |
2 |
|
= |
! |
|
|
|
+ |
! 2 |
|
! 2 |
||||||||||||||||
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
vC2 |
vC3 |
vC2 3 |
a |
C2 |
|
a |
|
|
|
a |
|
+ |
|
a |
ко р |
||||||||||||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C3 |
|
|
C2 3 |
|
|
|
C2 3 |
||||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
x |
|
|
|
|
|
|
|
|
|
! |
|
= |
|
! |
|
|
! |
|
|
! |
|
|
= |
|
! |
|
+ |
|
! |
|
|
|
! |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vB |
vA+ |
|
vBA |
|
a |
|
|
|
a |
|
|
a n+ |
|
a |
τ |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
A |
|
|
|
BA |
|
|
BA |
|
||||
3 |
A |
|
|
|
|
|
y4 |
|
|
|
|
|
|
! |
= |
|
! |
+ |
|
! |
|
|
! |
|
|
= |
|
! |
|
|
|
+ |
! |
|
|
+ |
|
! |
ко р |
||||||||
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
vB |
|
vB4 |
|
vB3 4 |
a |
|
|
|
a |
|
|
|
a |
|
|
a |
|
|
||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
B4 |
|
|
|
B3 |
4 |
|
|
B3 4 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
y4 |
! |
|
= |
|
! |
+ |
|
! |
|
|
! |
|
|
|
|
! |
|
|
|
|
! |
|
|
|
! |
|
|||||
|
y2 |
|
|
|
|
|
|
|
|
|
|
|
|
vA |
|
vA |
|
vA 2 |
a |
|
|
|
= |
a |
|
|
|
+ |
a |
|
+ |
|
a |
ко р |
|||||||||||||
4 |
|
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
! |
3 |
|
|
! 2 |
|
|
! |
3 |
|
!A3 |
|
|
!A2 |
|
!A3 2 |
|
!A3 2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vA3 |
= |
|
vA4 + |
|
vA3 4 |
a |
|
|
|
= |
a |
|
|
|
+ |
a |
|
+ |
|
a |
ко р |
||||||||
|
|
|
|
|
|
|
А |
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A3 |
|
|
|
|
A4 |
|
|
|
A3 4 |
|
|
|
A3 4 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
y4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
! |
|
|
= |
! |
|
|
! |
|
|
! |
|
|
|
= |
! |
|
|
|
+ |
! |
|
+ |
|
! |
|
|||||||
|
|
|
|
|
|
|
|
B x |
1 |
|
|
|
|
vB |
|
vB + |
|
vB 1 |
a |
2 |
|
a |
|
|
1 |
a |
|
|
a ко р |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
! |
2 |
|
|
! |
1 |
|
! |
2 |
! |
|
|
! |
|
|
|
! |
|
2 |
|
! |
2 |
||||||||||||||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
4 |
vB2 |
|
= vB4 + |
|
vB2 4 |
a |
B2 |
|
= a |
B4 |
+ a |
|
+ |
|
a |
ко р |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
y1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B2 4 |
|
|
B2 4 |
|||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

6
3. ПРИМЕР ПОСТРОЕНИЯ ПЛАНОВ СКОРОСТЕЙ И УСКОРЕНИЙ ПРИ ДВУХ РАЗЛОЖЕНИЯХ ДВИЖЕНИЯ
3.1. Условие задачи
Дано:
-кинематическая схема механизма (рис.3, а);
-координата ϕ 1 , угловая скорость ω 1 и угловое ускорение ε 1
звена 1.
Требуется определить скорости и ускорения точек А, С2, В, а также угловые скорости и ускорения звеньев.
3.2. Построение плана скоростей
Согласно изложенной выше методике, кинематический анализ будем вести от кривошипа 1 и далее в порядке присоединения групп Ассура. В нашем примере к начальному механизму, состоящему из стойки 0 и кривошипа 1, присоединена только одна двухповодковая группа Ассура, состоящая из кулисы 2 и кулисного камня 3 (см. строку 2 табл. 1). А2 и С3 - точки присоединения группы.
Скорость первой точки присоединения - точки А - определяется по
формуле (2.3), скорость второй - равна нулю. |
|
Как следует из табл. 1, абсолютное движение |
звена 2 разложе- |
но дважды. Первый раз - на поступательное вместе |
с системой коор- |
динат Аху и вращательное относительно этой системы. Второй раз -
на плоскопараллельное вместе с системой x3 y3 (связанной со звеном |
3) и |
|||||||||||||
прямолинейное поступательноеотносительноэтой системы. |
|
|||||||||||||
|
Скорость точки С2 определяется в результате решения систе- |
|||||||||||||
мы векторных уравнений, взятых из табл. 1: |
|
|||||||||||||
|
|
|
vC |
2 |
= |
vA |
|
+ |
v |
C A , |
(3.1) |
|||
|
|
|
|
|
2 |
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОA СА |
|
||||||
|
|
|
vC2 |
= |
vC3 |
|
+ vC2 3 , |
(3.2) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
//AB |
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
где |
v |
C A |
- скорость точки С2 относительно системы Axy; |
|
||||||||||
2 |
- скорость точки С2 |
относительно системы x3 y3. |
|
|||||||||||
|
vC 3 |
|
||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||

7
1
O  ω
ω 1 ε 1
1 ε 1
0
|
|
y |
|
ко р |
|
|
|
|
|
|
|
aC2 |
3 |
|
|
p |
|
|
|
A |
|
x |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ω |
2 |
|
|
|
|
|
2 |
|
|
vC2 3 |
|
c2 |
|
|
|
|
|
|
b |
a |
||
|
|
|
|
k |
|
|
|
|
ω |
2 |
=ω |
3 |
|
|
|
б) |
|
C |
|
|
x3 |
b |
c2 |
|
π |
|
3 |
|
|
|
n2 |
||
y3 |
|
|
|
|
|
||
|
|
|
n1 |
|
|
||
ε |
|
= ε |
|
|
|
||
В |
2 |
3 |
|
|
|||
|
|
|
|||||
|
|
|
|
|
a |
|
|
|
a) |
|
|
|
|
в) |
|
|
|
|
|
|
|
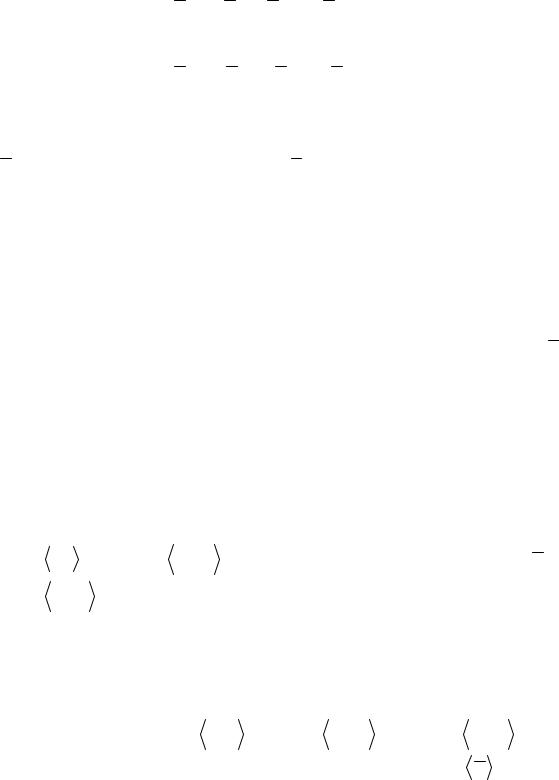
Рис.3. Кулисный механизм - (а) с планом скоростей - (б) и ускорений - (в)
Переносные скорости vA |
и vC определяются непосредственно по |
||
|
2 |
3 |
|
исходным данным: vA |
= vA = |
ω 1 lOA , |
vC = 0 . |
2 |
1 |
|
3 |
Относительные скорости известны своими линиями действия. |
|||
Под векторами показаны линии их |
действия. Кроме того, векторы |
||
подчеркнуты двумя чертами, если они известны и по величине, и по направлению. Одна черта означает, что известна только линия действия. Это позволяет наглядно увидеть, что в системе четыре неизвестных: модуль и направление скорости vC2 , а также модули
относительных скоростей vC2 A , vC2 3 . При четырех неизвестных
система векторных уравнений разрешима. Для решения системы, из произвольной точки р (рис.3, б), называемой полюсом плана скоростей, проводим ра, изображающий скорость vA2 . Определяем масштабный
коэффициент будущего плана скоростей:
v = vА / pа, м с− 1 /мм. |
(3.3) |
2 |
|
8
Через масштабный коэффициент скорость любой точки определяется по формуле:
v = v v , м/c, |
(3.4) |
где v - выраженная в мм длина отрезка, изображающего |
скорость |
v на плане.
Далее, согласно уравнению (3.1), к построенному вектору прибавляем вектор vC2 A . Для этого из точки a перпендикулярно СА прово-
дим линию действия этого вектора.
Точно так же строим цепь векторов правой части уравнения (3.2). В точке пересечения линий действия относительных скоростей лежит конец вектора vC2 . Обозначим этот конец через с2. Искомые
vC2 , vC2 3 равны вектору рс2, а vC2 A - вектору ас2. Величины построен-
ных скоростей определяются по формуле (3.4). На этом система уравнений (3.1), (3.2) решена.
Скорость точки В кулисы 2 определим по теореме подобия, т.к. скорости двух точек (А и С2) этого звена уже известны. Согласно теореме подобия, точки одного и того же звена на схеме механизма и концы абсолютных скоростей (ускорений) этих же точек на плане скоростей (ускорений) образуютподобныеисходственно расположенныефигуры.
Исходя из теоремы, на отрезке ас2 (рис.3, б) построим треугольник ac2b, подобный треугольнику A С2 B (рис.3, а). Отрезок рb изобра-
жает искомую скорость. |
Модуль скорости точки B найдем по форму- |
|
ле(3.4). |
|
|
На этом линейные скорости всех точек определены. |
Найдем уг- |
|
ловые скорости звеньев: |
|
|
ω 2 =ω |
3 = vC A / lAC , с-1. |
(3.5) |
|
2 |
|
Направление угловыхскоростей определяетсянаправлениемвектора
vC2 A .
3.3. Построение плана ускорений
Нормальную и тангенциальную составляющие ускорения точки А определим по формулам (2.3), (2.4), а полное ускорение - их гра-
фическим сложением (рис. 3, в), где |
π n |
= |
an |
и |
n а = |
aτ |
. Буквой |
|
1 |
|
А |
|
1 |
А |
|
π обозначен полюс плана ускорений. |
Полное |
ускорение |
точки А: |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
аА = |
π а a , м/с2, |
где |
а |
|
- масштабный |
коэффициент |
плана |
ускоре- |
|||||||||||||||||||||||||||
ний, |
который |
надо определить после выбора отрезка |
π n1 . |
|
|
||||||||||||||||||||||||||||||
|
|
Ускорение точки С2 определим из разложений движения, приня- |
|||||||||||||||||||||||||||||||||
тых при определении скоростей ( см. |
|
строку 2 табл. 1 ): |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
a |
C2 |
= |
|
а |
А |
+ |
|
а |
n + |
|
|
|
а |
τ |
|
, |
|
|
|
|
|
|
(3.6) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 А |
|
|
|
|
С2 А |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
//CA |
CA |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
a |
C2 |
= |
|
|
a |
|
|
|
+ |
|
a |
+ |
|
|
|
a |
ко р . |
|
|
|
|
(3.7) |
|||||||||
|
|
|
|
|
|
|
|
|
C3 |
|
|
|
C2 3 |
|
|
|
|
C2 3 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=0 |
|
//АВ |
|
|
АВ |
|
|
|
|
|
|
Axy |
||||||||||||||||
|
|
Нормальное |
ускорение |
|
|
|
точки |
|
C2 |
относительно системы |
|||||||||||||||||||||||||
а |
n |
и ускорение |
Кориолиса |
а |
|
ко р |
подчеркнуты двумя |
линиями, |
т. |
||||||||||||||||||||||||||
С2 А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
к. их модули известны. |
Они определены по формулам: |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
аСn |
|
А = |
|
|
vC2 |
A |
/ lAC , |
|
|
|
|
|
(3.8) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
аСко 3р |
= |
2ω |
|
|
пе р vотн = |
|
2ω |
3 vC 3 . |
|
|
|
|
(3.9) |
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Направление |
ускорения |
Кориолиса получим поворотом вектора |
|||||||||||||||||||||||||||||||
относительной |
скорости |
|
|
|
vC 3 |
( рис. 3.1, б, в ) на 90o |
в сторону |
ω 3 . |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отметим, что |
в уравнении |
(3.6) |
|
ускорение Кориолиса |
а |
ко р |
отсут- |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 А |
|
|
|
ствует, т.к. угловая скорость системы Аху равна нулю (см. формулу
(3.9)).
Подчеркивания в системе векторных уравнений (3.6) и (3.7) показывают, что в ней четыре неизвестных. Значит она разрешима. Графическое решение этой системы не отличается от решения системы (3.1) и (3.2), поэтому ограничимся лишь указанием после-
довательности |
|
откладывания векторов на плане ускорений |
(рис. 3, в): |
|||||||||
π а = |
а |
А |
, |
an |
2 |
= |
a n |
, линия действия вектора |
а |
τ |
. Затем, |
|
|
|
|
|
|
C2 A |
|
|
С2 А |
|
|||
π k = |
aCко |
3р , |
линия |
действия вектора аС |
3 . Заметим , что при построе- |
|||||||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
нии цепочек |
векторов |
правой части уравнений (3.6) и |
(3.7) сначала |
|||||||||
откладывались |
|
векторы известные по величине и направлению, а за- |
||||||||||
тем проводились линии действия векторов, неизвестных по модулю.
Точку пересечения указанных линий действия обозначим |
через c2. В |
|||||||||||||||
результате получим: a |
C2 |
= π c |
2 |
, a τ |
= |
n |
2 |
c |
2 |
, |
а |
С2 3 |
= |
kc |
2 |
. Модули |
|
|
C2 А |
|
|
|
|
|
|
|
|
||||||
искомых векторов определим по формуле: |
a = |
a |
а , |
м/с2. |
|
|
||||||||||