

А.Е. Медведев Позиционные регуляторы
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
«КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электропривода и автоматизации
ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Методические указания к выполнению лабораторной работы по курсу «Элементы систем автоматики» для студентов специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов»
Составитель А.Е. Медведев
Утверждены на заседании кафедры Протокол № 6 от 21.02.03
Рекомендованы к печати учебно-методической комиссией по специальности 180400 Протокол № 7 от 21.02.03
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
1. ЦЕЛЬ РАБОТЫ
Изучить устройство и принцип действия позиционного регулирующего устройства (регулятора).
2.ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
2.1.Ознакомиться с принципами позиционного регулирования и параметрами настройки двух- и трехпозиционных регуляторов.
2.2.Ознакомиться с устройством и провести испытания трехпозиционного регулирующего устройства (ТРУ) на стенде.
3.СОДЕРЖАНИЕ ОТЧЕТА
3.1.Наименование и цель работы.
3.2.Назначение позиционных регуляторов и их характеристики.
3.3.Принципиальная электрическая схема и краткое описание работы ТРУ.
3.4.Статические характеристики ТРУ, построенные по результатам испытаний на стенде.
4.УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ПОЗИЦИОННОГО РЕГУЛИРУЮЩЕГО УСТРОЙСТВА
4.1. Краткие теоретические сведения
Позиционные системы автоматического регулирования широко используются для управления технологическими процессами в различных отраслях промышленности. Их применяют при благоприятных динамических свойствах объекта управления (τ0/Т0<0,2) и «нежестких» требованиях к качеству процесса регулирования. Позиционные регулирующие устройства сравнительно просты. Они, как правило, встраиваются в измерительные приборы и устройства.
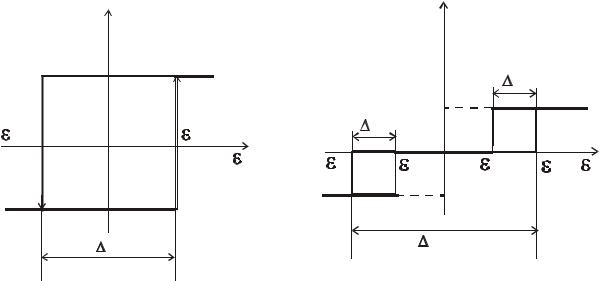
Системы позиционного регулирования имеют в своем составе двухпозиционный или трехпозиционный регулятор, выходная величина которого может принимать только два или три значения. Статические характеристики таких регуляторов показаны на рис. 1 и рис. 2. В
2
координатах управляющее воздействие Uр и рассогласование ε = х–хзад, где х – регулируемая величина, а хзад – заданное ее значение.
Up |
Up |
|
max |
|
|
|
|
Up |
|
|
B |
|
|
max |
||
|
|
Up |
|
|
2 |
1 |
B' |
|
|
|
|
|
||
|
'1 |
'2 |
2 |
1 |
|
min |
|
min |
|
|
Up |
|
Up |
|
|
B |
|
нч |
|
Рис. 1. Статическая характе- |
Рис. 2. Статическая характе- |
ристика двухпозиционного регу- |
ристика трехпозиционного регуля- |
лятора |
тора |
Параметрами настройки двухпозиционного регулятора служат:
1)ширина зоны возврата (∆В);
2)величина управляющего воздействия ( Uminp , Umaxp ).
Утрехпозиционного регулятора параметрами настройки являются:
1)зона нечувствительности (∆нч);
2)зоны возврата (∆В, ∆В/);
3)величина управляющего воздействия ( Uminp , Umaxp , Uномp ).
Процесс регулирования в двухпозиционных системах носит колебательный характер, в трехпозиционных системах данный режим работы наблюдается в тех случаях, когда регулируемый параметр выходит за пределы зоны нечувствительности регулятора.
Качество процесса регулирования в двухпозиционных системах регулирования оценивается:
1)амплитудой колебаний регулируемого параметра;
2)периодом колебаний регулируемого параметра или частотой переключений регулятора;
3)смещением среднего значения автоколебаний (оси колебаний) относительно заданного значения регулируемого параметра. Данные по-
3
казатели качества регулирования зависят от свойств объекта управления (запаздывания, инерционности) и параметров настройки регулятора. Анализ работы позиционной САР показывает, что уменьшение ширины зоны возврата уменьшает амплитуду колебаний регулируемого параметра, но увеличивает частоту переключений регулятора. Уменьшение величины управляющего воздействия уменьшает амплитуду колебаний и уменьшает частоту переключений регулятора, т.е. улучшает оба показателя качества процесса регулирования, но величина управляющего воздействия должна выбираться таким образом, чтобы она могла компенсировать максимально возможное возмущение, действующее на объект. Обычно данная величина выбирается с запасом.
Upmax = (1,5 ÷2) |
Kв |
fmax , |
(1) |
|
|||
|
К0 |
|
|
где К0 – коэффициент передачи объекта по управляющему каналу; Кв – коэффициент передачи объекта по возмущающему каналу; fmax – величина максимального возмущающего воздействия.
При определении величины управляющего воздействия рекомендуется вначале найти ее номинальное значение Uномp , при котором регулируемый параметр равен своему заданному значению, а затем в соответствии с выражением (1) выбрать положительное ( Umaxp ) и отрица-
тельное ( Uminp ) приращение управляющего воздействия. Для объектов,
описываемых дифференциальными уравнениями первого порядка с запаздыванием, в источнике [1] приведены формулы, позволяющие определить качественные показатели процесса регулирования при выбранных параметрах настройки регулятора.
4.2. Принципиальная электрическая схема ТРУ
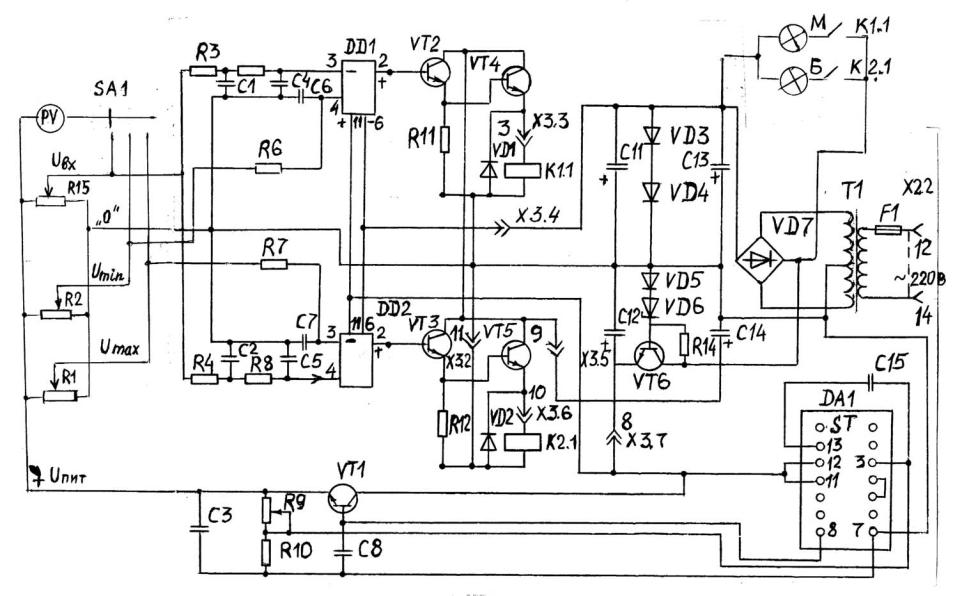
На стенде установлен блок трехпозиционного регулирующего устройства, входящий в состав вторичного прибора Н3022К (миллиамперметр самопишущий контактный щитовой). Принципиальная электрическая схема ТРУ представлена на рис. 3. Устройство реализует условие «меньше (М) – норма (Н) – больше (Б)». Блок ТРУ содержит трансформатор питания, печатные платы питания и управления, выходные реле.
4
Рис. 3. Принципиальная электрическая схема трехпозиционного РУ
5
Питание регулирующего устройства осуществляется от трансформатора Т1 и стабилизатора на транзисторе VT6.
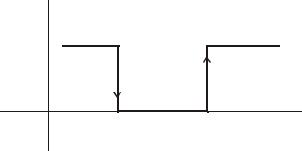
Установка максимального (xmax) и минимального (xmin) значений регулируемого параметра производится с помощью резисторных задатчиков, соответственно R1 и R2. Резисторным задатчиком R15 может изменяться значение входного сигнала (регулируемого параметра х) в диапазоне 0÷4В. Питание резисторов осуществляется от источника опорного напряжения, в качестве которого используется стабилизатор, выполненный на микросхеме DA1 и транзисторе VT1. Сравнение пороговых напряжений максимального Umax и минимального Umin, полученных от резисторов R1, R2, с входным напряжением Uвх, формируемым резистором R15, производится с помощью аналоговых компараторов DD1 и DD2. При неравенстве этих напряжений срабатывает либо цепь «компаратор DD1, транзисторы VT1, VT4 и реле К1», либо цепь «компаратор DD2, транзисторы VT3, VT5 и реле К2». При превышении входным напряжением Uвх минимального порога Umin гаснет сигнальная лампа М («меньше»). Сигнальная лампа Б («больше») загорается при превышении входным напряжением максимального порога Umax. Таким образом, регулирующее устройство представляет собой пороговый элемент, состоящий из двух аналого-дискретных преобразователей, входы которых объединены, а выходы разделены, и состояние последних определяется соответствующими порогами срабатывания. Примерный вид статической характеристики ТРУ показан на рис. 4, где Uвх и Zру – соответственно входной и выходной сигналы регулирующе-
го устройства.
Zру 
"М" "Б"
"НОРМА"
 Uвх
Uвх
Umin Umax
Рис. 4. Статическая характеристика ТРУ
В рассматриваемом позиционном регулирующем устройстве зоны возврата отсутствуют, а зона нечувствительности определяется значениями порогов срабатывания по выражению
∆нч = Umax −Umin . |
(2) |
6
5.ПОРЯДОК РАБОТЫ НА СТЕНДЕ
5.1.Включить питание стенда «Автоматические регуляторы» тумблером «Общий», расположенным в нижней части лицевой панели стенда.
5.2.Включить питание позиционного регулирующего устройства тумблером ПР, расположенным рядом с тумблером «Общий».
5.3.Установить с помощью задатчиков R1, R2, вольтметра PV и переключателя SA1 заданные значения порогов срабатывания ТРУ
Umax и Umin, например, 3 и 2 В.
5.4.Подключить вольтметр PV переключателем SA1 к выходу резистора R15 и, плавно изменяя с его помощью входной сигнал от 0
до 4 В, зафиксировать значения Uвх, при которых происходит скачкообразное изменение выходных сигналов М и Б регулирующего устройства (гаснет лампа М и загорается лампа Б).
5.5.Изменить значения порогов Umax и Umin и повторить испытания по п. 5.4. По результатам испытаний построить статические характеристики ТРУ (см. рис. 4) для первого и второго вариантов заданий порогов срабатывания.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ
При подготовке к защите лабораторной работы рекомендуется ответить на следующие вопросы:
1.В каких случаях рекомендуется использовать позиционные регуляторы?
2.Параметры настройки двух- и трехпозиционных регуляторов.
3.Принцип действия трехпозиционного регулирующего устрой-
ства.
4.Назначение компараторов в ТРУ.
5.Особенности статической характеристики исследуемого ТРУ по сравнению с обычной характеристикой трехпозиционного регулятора.
ЛИТЕРАТУРА
1. Наладка средств автоматизации и автоматических систем регулирования. Справ. пособие/ Под ред. А.С. Клюева. – М.: Энергоатом-
издат, 1989. –368 с.
7
Составитель
АЛЕКСЕЙ ЕЛИСЕЕВИЧ МЕДВЕДЕВ
ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Методические указания к выполнению лабораторной работы по курсу «Элементы систем автоматики» для студентов специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов»
Редактор А.В. Дюмина
Подписано в печать 28.03.03. Формат 60х84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд.л. 0,4. Тираж 60 экз. Заказ ГУ КузГТУ, 650026, Кемерово, ул. Весенняя, 28.
Типография ГУ КузГТУ, 650099, Кемерово, ул. Д. Бедного, 4А.