

А.Е. Медведев Система автоматического регулирования соотношения расходов жидкостей
.pdfМинистерство образования Российской Федерации Государственное учреждение
Кузбасский государственный технический университет Кафедра электропривода и автоматизации
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СООТНОШЕНИЯ РАСХОДОВ ЖИДКОСТЕЙ
Методические указания к выполнению лабораторной работы по дисциплине «Системы автоматизации и управления»
для студентов направления 550200 «Автоматизация и управление»
Составитель А. Е. Медведев Утверждены на заседании кафедры Протокол № 7 от 28.06.02 Рекомендованы к печати учебнометодической комиссией направления 550200 Протокол № 8 от 28.06.02 Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2002
1
1. ЦЕЛЬ РАБОТЫ
Изучить устройство и принцип действия системы автоматического регулирования (САР) соотношения расходов жидкостей.
2.ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
2.1.Ознакомиться с конструкцией технической части (баки, вентили, трубопроводы), шкафного щита (шкафа), приборов и средств автоматизации.
2.2.Провести исследования функционирования САР соотношения расходов жидкостей.
3.СОДЕРЖАНИЕ ОТЧЕТА
3.1.Назначение и функциональная схема САР соотношения расходов жидкостей.
3.2.Функциональная схема регулятора РП4-У.
3.3.Схема расположения приборов и средств автоматизации на стенде, их краткая характеристика.
3.4.Результаты настройки и исследования САР соотношения расходов: параметры настройки регулятора РП4-У, таблицы и графики расходов жидкостей, временные диаграммы сигналов регулятора.
4.УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ СТЕНДА
«САР СООТНОШЕНИЯ РАСХОДОВ ЖИДКОСТЕЙ»
Система предназначена для автоматизации процесса смешения двух жидкостей в заданном их соотношении: система обеспечивает стабилизацию заданного соотношения расходов жидкостей, их непрерывную индикацию и регистрацию.
Стенд для исследования САР (рис.1) состоит из шкафного щита (шкафа) типа ШЩ-БД1-У4, в котором размещены технологическое оборудование, приборы и средства автоматизации.
2
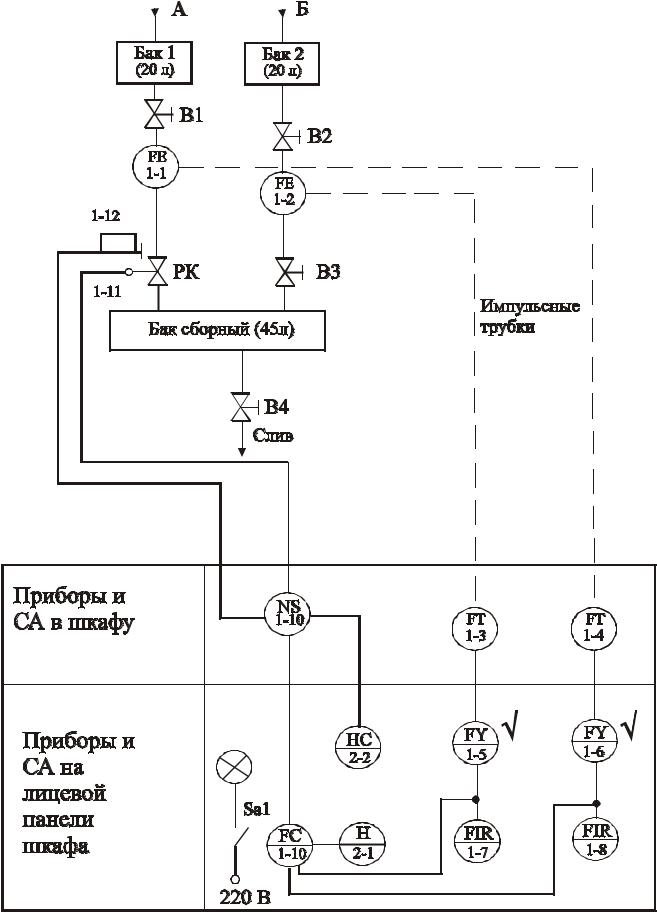
Рис.1. Функциональная схема стенда «САР соотношения расходов»
3
Технологическое оборудование стенда состоит из баков 1,2 емкостью 20 литров для размещения в них жидкостей А и В, сборного бака емкостью 45 литров, запорных вентилей В1÷В4 и трубопроводов.
Приборы и средства автоматизации, располагаемые на передней панели шкафа и внутри его непосредственно у технологического оборудования:
–измерительные диафрагмы 1-1, 1-2 с коническим выводом и наружным диаметром 21 мм, установленные в трубопроводах и создающие перепад давления 0,0025 МПа. Диаметры входных отверстий диафрагмы равны 4,2 мм, выходных отверстий
– 8,2 мм;
–измерительные преобразователи 1-3, 1-4 типа «Сапфир– 22ДД», модель 2440, преобразующие перепад давления на диафрагмах в унифицированные сигналы 0÷5 мА;
–блоки извлечения корня квадратного 1-5, 1-6 типа БИК–1, преобразующие перепад давления в расход;
–приборы аналоговые показывающие и регистрирующие 1-7, 1-8 типа А542–049;
–блок регулирующий (регулятор) 1-9 типа РП4–У, формирующий импульсные сигналы 24В постоянного тока, обеспечивающий совместно с исполнительным механизмом постоянной скорости ПИ-закон регулирования;
–пускатель магнитный реверсивный 1-10 типа МПР–58, управляющий приводом регулирующего клапана РК;
–исполнительный механизм электрический однооборотный 1-10 типа МЭО 40/63–025, работающий на постоянной скорости. Напряжение питания ~220В, время полного хода выходного вала Тм = 63с;
–ручной реостатный задатчик 2-1 типа РЗД-12, обеспечивающий изменение сигнала задания на входе регулятора на ±5%;
–блок ручного управления 2-2 типа БРУ-32, обеспечивающий: а) выбор режима управления (ручной, автоматический) исполни-
тельным механизмом; б) ручное управление приводом регулирующего клапана;
в) индикацию положения регулирующего клапана;
–блок питания измерительных преобразователей 22БП-36.
4
А-542 РП4-У А-542
Регулятор





 соотношения
соотношения 




БИК-1 22БП-36 БИК-1
Закрытие |
БРУ-32 |
Открытие |
|
(М) |
(Б) |
РЗД-12 |
SA1 |
|
0 100%
Задание Сеть
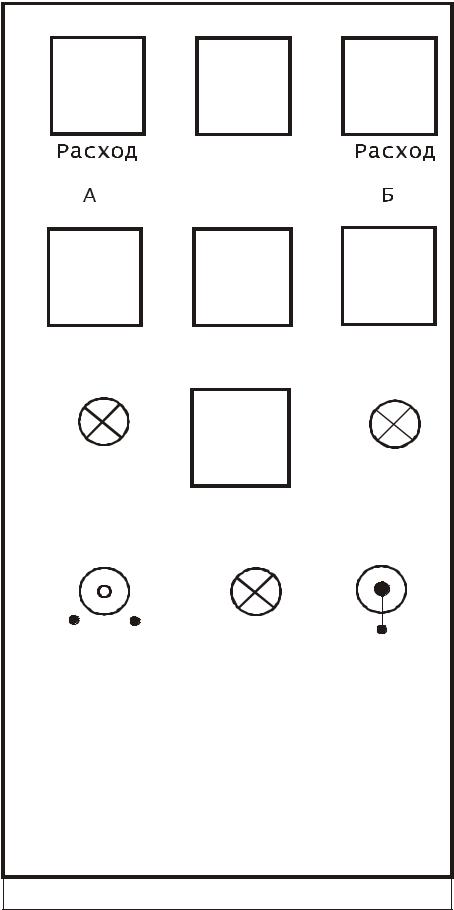
Рис.2. Расположение приборов и СА на лицевой панели шкафа
5
Расположение средств автоматики на лицевой панели шкафа представлено на рис.2, а схема соединений элементов системы автоматического регулирования – на рис.3. На последней схеме приняты следующие обозначения:
FА, FБ – расходы жидкостей А и Б; ДФ1, ДФ2 – измерительные диафрагмы;
ИП1, ИП2 – измерительные преобразователи; 22БП-36 – блок питания измерительных преобразователей напря-
жением 36В постоянного тока;
SA1 – выключатель питания 220В;
«М», «Б» – выходные сигналы регулятора по направлениям, соответственно «меньше» и «больше» (на закрытие и открытие регулирующего клапана);
К1, К2 – обмотки контакторов пускателя;
SQ1, SQ2 – конечные выключатели исполнительного механизма
(ИМ);
М – электродвигатель ИМ;
R – резисторный датчик положения выходного вала ИМ (датчик положения регулирующего клапана);
БП – блок питания для резисторного датчика напряжением 12В постоянного тока;
SM, SБ – кнопки ручного управления ИМ, соответственно, на закрытие и открытие регулирующего клапана, расположенные в БРУ-32; РА – указатель положения (миллиамперметр) регулирующего
клапана, расположенный в БРУ-32; ПР – переключатель режима управления (Авт.– автоматический,
Руч.– ручной), расположенный в БРУ-32; ПГ – панель с гнездами Х1÷Х7 для подключения осциллографа.
Важнейшим элементом САР является регулятор РП4-У, работающий с датчиками унифицированных сигналов токовых 0÷5 мА или напряжения постоянного тока 0÷10В.

6
Рис. 3. Схема соединений элементов стенда
7
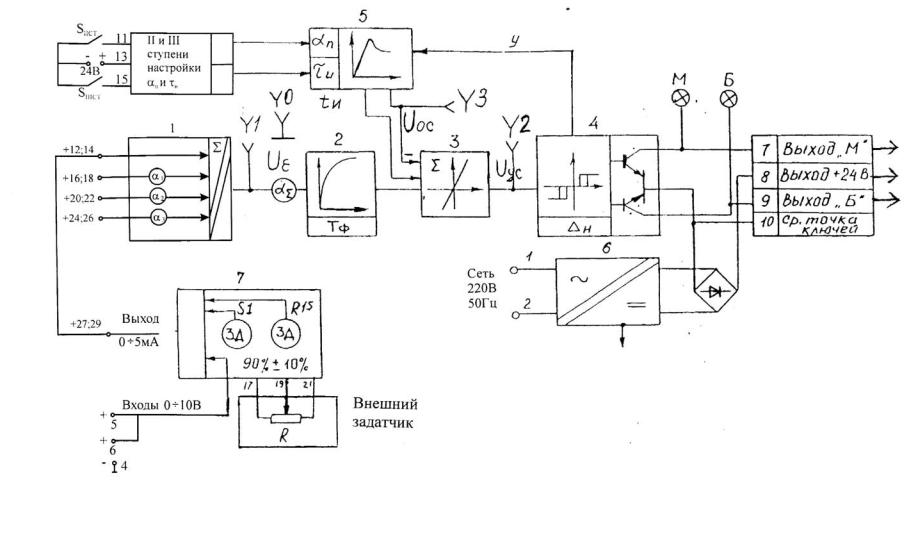
Рис. 4. Функциональная схема регулятора РПЧ-У
8
Регулятор (рис. 4) содержит входной сумматор 1, демпфер 2, операционный усилитель–сумматор 3, трехпозиционный нуль орган 4, инерционное звено отрицательной обратной связи 5, источник питания 6, внутренний задатчик 7.
Внешний задатчик R подключается к клеммам 17, 19, 21 регулятора. Диапазон его действия ±0,25мА (±5%);
Для использования внутреннего задатчика необходимо его выход (клеммы 27, 29) подключить к входу регулятора (клеммы 12, 14).
Передаточная функция РП4-У совместно с использованным механизмом постоянной скорости имеет вид
|
|
|
|
Wp ( p) = |
∆µ( p) |
= |
|
|
kП |
(1+ |
1 |
) , |
(1) |
|
|
|
|
ε( p) |
1 |
+Тф |
τи p |
||||||
|
|
|
|
|
|
|
|
|
|||||
где ∆µ – изменение положения регулирующего клапана; |
|
||||||||||||
ε =х-хЗАД – рассогласование; |
|
|
|
|
|
|
|
|
|
||||
kП |
= |
|
αП |
100 – коэффициент пропорциональности регулятора; |
|
||||||||
|
|
|
|||||||||||
|
|
ТМ |
|
|
|
|
|
|
|
|
|
||
αП – коэффициент передачи РП4-У в секундах на процент входного сигнала (с/%);
ТМ – время 100% хода исполнительного механизма; ТФ – постоянная времени демпфирования; τИ – постоянная времени интегрирования.
Органы настройки регулятора расположены на боковой панели управления, закрепленной на подвижном шасси (при настройке шасси выдвигается из корпуса). На передней панели регулятора расположены световые индикаторы М и Б выходных сигналов по направлениям «меньше», «больше».
На боковой панели управления установлены следующие органы настройки и контроля:
– ручка «∆» для плавной установки требуемого значения зоны нечувствительности в диапазоне от 0,2 до 2% от диапазона изменения входного сигнала;
–ручка «αП» для дискретной установки значений коэффициента передачи: 0,5; 0,65; 0,8; …; 5 с/%;
–ручка «ТФ» для задания постоянной времени демпфирования в диапазоне от 0 до 30 с;
9
–ручка «tИ» для задания минимальной длительности выходных импульсов регулятора в диапазоне от 0,1 до 1 с;
–ручка «αΣ» для масштабирования сигнала рассогласования в диапазоне от 0 до 1;
–ручка «τИ» для дискретной установки значений постоянных времени интегрирования: 5, 10, 20, 35, 60, 100, 150, 220, 330, 500 с;
–ручки «α1», «α2», «α3» для масштабирования входных сигналов в диапазоне от 0 до 1;
–ручки «задание» для дискретной (от 0 до 90%) и плавной (от 0 до 10%) установки сигнала внутреннего задатчика (0÷5мА);
–гнезда «Y1», «Y2», «Y3» для контроля работы, соответственно, входной схемы, усилителя и интегратора обратной связи.
Схема измерительного преобразователя Сапфир-22ДД модели 2440 представлена на рис.5. Тензопреобразователь 4 мембраннорычажного типа размещен внутри основания 9 в замкнутой полости 11, заполненной кремнийорганической жидкостью, и отделен от измеряемой среды металлическими гофрированными мембранами 8. Последние приварены к основанию 9 и соединены между собой центральным штоком 6, который связан с концом рычага тензопреобразователя 4 с помощью тяги 5. Фланцы 10 уплотнены прокладками 3. Воздействие измеряемой разности давлений (большее давление подается в камеру 7, меньшее – в камеру 12) вызывает прогиб мембран 8, изгиб мембраны тензопреобразователя 4 и изменение сопротивления тензорезисторов.
Электрический сигнал от тензопреобразователя из измерительного блока в электронное устройство (усилитель) 1 поступает по проводам через гермовывод 2. Электронный блок размещен в специальном корпусе, имеет два корректора для плавной настройки соответственно диапазона и «нуля» выходного сигнала и перемычки для ступенчатого смещения «нуля», ступенчатой настройки диапазона выходного сигнала и перемычки для изменения направления смещения «нуля».
Соединительные трубки от места отбора давления (диафрагм) к преобразователю должны иметь уклон вниз (не менее 1:10). Если это невозможно, то при измерении разности давлений жидкости следует установить в наивысших точках соединительной линии газосборники с элементами продувки соединительных линий.