

В.А. Старовойтов Исследование динамических характеристик нейтрального электромагнитного реле постоянного тока
.pdf0
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
«КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электропривода и автоматизации
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК НЕЙТРАЛЬНОГО ЭЛЕКТРОМАГНИТНОГО РЕЛЕ ПОСТОЯННОГО ТОКА
Методические указания к лабораторной работе по курсам «Управление техническими системами» и «Технические средства
автоматизации» для студентов специальностей 10070, 170500, 170100, 250100, 250400, 250600 всех форм обучения
Составители В.А. Старовойтов Н.М. Шаулева
Утверждены на заседании кафедры Протокол № 5 от 15.04.02
Рекомендованы к печати учебно-методической комиссией специальности 170500 Протокол № 3 от 21.11.02
Электронная копия хранится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с принципом действия, конструкцией и возможностями изменения динамических характеристик нейтрального электромагнитного реле.
2.СОДЕРЖАНИЕ РАБОТЫ
1.Ознакомление с настоящими указаниями и техническими средствами, расположенными на стенде.
2.Экспериментальное определение времени ускорения и замедления электромагнитного реле с помощью электрических методов.
3.Подготовка отчёта к защите.
3.УКАЗАНИЯ К ОТЧЁТУ
Отчёт должен содержать цель работы и сведения об исполнителях (3 – 4 человека).
Кроме того, должны быть представлены экспериментальные данные о времени срабатывания и отпускания реле, сведённые в таблицу.
4.ОБЩИЕ ПОЛОЖЕНИЯ
Вразговорной речи и на профессиональном жаргоне электриков магнит – это источник магнитного поля, чаще всего в виде намагниченного ферромагнетика. Электромагнитом (ЭМ) называется служащий для той же цели ферромагнитный сердечник из магнитомягкого материала с обмоткой, обтекаемой током. Внешним проявлением магнитных свойств является притяжение ферромагнитных предметов. Однако, если постоянный магнит способен удерживать притянутый предмет сколь угодно долгое время, то ЭМ – только в период времени, в течение которого по обмотке протекает достаточный для удерживания этого предмета ток. Именно последнее обстоятельство позволяет управлять процессом притяжения и отпускания предмета, в качестве которого можно использовать разнообразнейшие устройства, включающие, отключающие или перемещающие что-либо.
Электромагниты широко применяются в различных электромеханических механизмах и устройствах, действие которых происходит
2
вследствие притяжения подвижной ферромагнитной части устройства (якоря) к неподвижной части (сердечнику) магнитопровода. Подобные механизмы (устройства) также называют ЭМ. Из вышеизложенного следует, что ЭМ представляет собой устройство, у которого входная электрическая величина (ток, напряжение) преобразуется в механическое перемещение (до 300 мм) подвижной части.
По назначению ЭМ делятся на приводные, перемещающие исполнительные элементы (клапаны, задвижки, путевые стрелки на городском и железнодорожном транспорте и др.) и рассчитываемые на определённые значения силы и перемещения; удерживающие, фиксирующие (замки, плиты металлообрабатывающих станков, подъёмные краны и пр.), рассчитываемые на определённую силу; специальные, применяемые в ускорителях элементарных частиц, электронной оптике и др.
По роду тока в обмотке различают ЭМ постоянного и переменного токов. ЭМ постоянного тока, в свою очередь, подразделяются на нейтральные, которые не реагируют на полярность входного сигнала, и поляризованные, у которых направление перемещения якоря определяется полярностью управляющего сигнала.
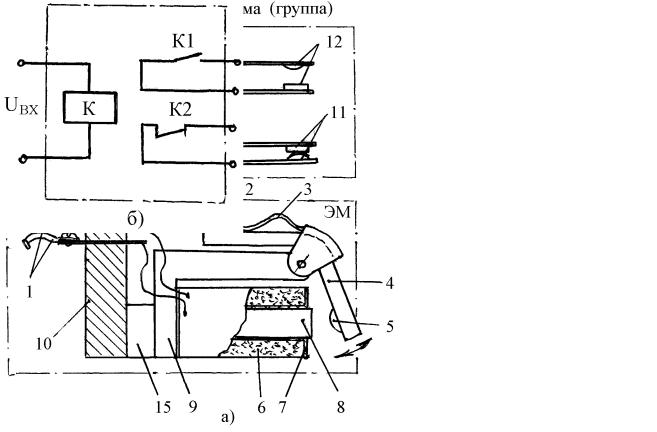
Конструктивное исполнение ЭМ разнообразно, однако наибольшее распространение в системах электроавтоматики получила конструкция клапанного типа (рис. 1), реализующая значительные усилия и обладающая повышенной чувствительностью [1, c. 8].
ЭМ состоит из сердечника 8 – части магнитопривода, на котором размещена обмотка, ярма (корпуса) 9, т.е. остальной неподвижной части магнитопривода, и якоря 4 – подвижного участка магнитопривода. Ярмо укреплено на плате 10, на которой расположены выводы 1 обмотки возбуждения (катушки) 6, навитой на каркасе 7. Штифт отлипания 5 не позволяет якорю оставаться притянутым к сердечнику после снятия входного напряжения под действием остаточного потока. В исходное (нормальное) положение при обесточивании обмотки якорь приходит под действием возвратной пружины 3. Цифрой 2 обозначен толкатель (изоляционный штифт) для воздействия на контактную систему (группу), которая имеет две пары (может быть и больше) подвижных контактов 11 и 12, подпружиненных пластинкой 13, с соответствующими выводами 14 и 16.
3
Рис. 1. Нейтральное электромагнитное реле с ЭМ клапанного типа: а – конструкция; б – электрическая схема
Подобный симбиоз из ЭМ и контактной системы и называют электромагнитным реле (ЭМР). В нашем случае в невозбужденном (нормальном) состоянии, т.е. при отсутствии тока в обмотке, контакты 11 нормально замкнуты, а контакты 12 нормально разомкнуты, что по современной терминологии соответствует размыкающим и замыкающим контактам соответственно. Именно такими они становятся при возбуждении, т.е. после подачи тока в обмотку и «прилипания» якоря 4
ксердечнику 8 под действием электромагнитной силы.
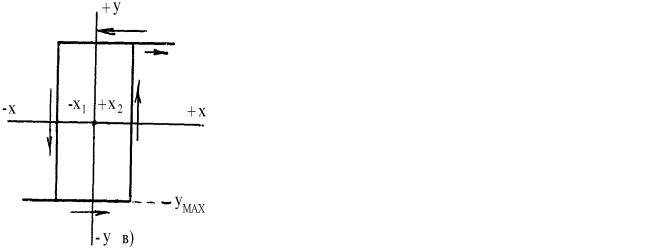
Вобщем случае реле – это устройство, скачкообразно, ступенчато изменяющее свои выходные параметры при определённых значениях входного сигнала и не изменяющее их при последующем изменении сигнала в том же направлении. На рис. 2 представлены характеристики управления реле в виде типичных релейных зависимостей.
4
Рис. 2. Характеристики управления реле (статические характеристики)
На рис. 2, а, б показаны характеристики двухпозиционных нейтральных реле, не реагирующих на знак входного сигнала. При изменении входного сигнала от 0 до х2 (рис. 2, а) реле не изменяет своего состояния. Но при достижении значения х2 (параметр срабатывания) выходной сигнал y скачкообразно изменяется от уmin до ymax. Дальнейшее увеличение входного сигнала не изменяет величину выходного сигнала, т.е. у = уmax = const. При уменьшении входного сигнала (об-
ратный ход) до х = х1 выходной сигнал не изменяется, т.е. у = уmax, а при достижении входным сигналом значения х1 (параметр отпускания)
выходной сигнал скачкообразно изменяется от уmax до уmin. Характеристика, изображённая на рис. 2, а, реализуется с помо-
щью замыкающих контактов 12 (см. рис. 1, а), а характеристика, изображённая на рис. 2, б, соответствует работе размыкающих контактов
11 ЭМР.
Отличием устройств, имеющих характеристику, изображённую на рис. 2, б, от устройств, имеющих характеристику, показанную на рис. 2, а, является инвертирование сигнала. При отсутствии входного сигнала (х = 0) выходной сигнал у = уmax; при наличии входного сигнала (х = х2) выходной сигнал отсутствует или имеет минимальное значе-
ние (у = уmin).
Характеристика двухпозиционных релейных устройств, обладающих двумя устойчивыми состояниями, приведена на рис. 2, в. При снятии входного сигнала (х = 0) реле останется в состоянии, в котором находилось до этого, т.е. сохранит, запомнит это состояние (память). Отличием этой зависимости (рис. 2, в) является её реверсивный харак-
5
тер – при изменении знака сигнала на входе меняется знак сигнала на выходе.
Являясь одним из основных технических средств (элементов) автоматики, реле позволяет осуществлять определённую последовательность в работе отдельных частей системы.
Классификационные признаки реле весьма многочисленны. Так, в зависимости от природы физической величины, на которую реагируют эти устройства, различают электромагнитные (ЭМР), акустические, газовые, радиационные, оптические, химические и другие виды. В зависимости от назначения реле разделяют на коммутационные, осуществляющие взаимодействие и связи в релейных схемах, усилительные для усиления входного сигнала и контрольные (измерительные) для измерения (контроля) заданного уровня измеряемого параметра.
Все вышеизложенные соображения справедливы и для ЭМР. При этом в качестве входной величины рассматривают напряжение U или ток I катушки ЭМР, а в качестве выходной – ток или напряжение, коммутируемые с помощью контактов в цепи определённой мощности. В соответствии с этим, одной из основных характеристик ЭМР является мощность срабатывания РСР, т.е. минимальная мощность, потребляемая катушкой при срабатывании ЭМР. Немаловажной характеристикой служит и выходная, или коммутируемая, мощность РВЫХ, рассматриваемая как произведение максимального отключаемого тока на напряжение источника питания выходной цепи [2, c. 138].
Одним из критериев оценки ЭМР являются их тяговые характеристики. Действительно, при наличии сигнала на входе возникающий в катушке ток создаёт в магнитопроводе магнитное поле, намагничивающее подвижный якорь. Возникающая при этом электромагнитная сила FЭ преодолевает сопротивление пружин, обеспечивая перемещение контактов. Величина этой силы максимальна при притянутом якоре (δ = 0) и минимальна при непритянутом. Численное её определение связано с применением трудоёмких графо-аналитических методов [1, c. 12 – 14].
При подаче на вход или снятии с него управляющего сигнала в ЭМР возникают сложные переходные процессы, при анализе которых на практике не учитывают гистерезис, вихревые токи и считают кривую намагничивания линейной.
Процесс срабатывания ЭМР состоит из двух этапов – трогания и движения якоря; следовательно, время срабатывания tСРБ состоит из

6
двух составляющих – трогания и движения; tСРБ = tТР + tДВ. В течение первого этапа после подведения напряжения U ток в катушке I, магнитный поток Ф, а следовательно, и электромагнитная сила FЭ увеличиваются до значений, при которых FЭ достигает значения противодействующей механической силы FМ (действие возвратных и контактных пружин). На этом этапе якорь неподвижен, а переходный процесс определяется процессом в катушке ЭМР при постоянной индуктивности L.
Уравнение электрического равновесия при неподвижном якоре и
L = const
U = iR + L |
di |
. |
(1) |
|
|||
dt |
|
|
|
Решение этого уравнения определяет закон изменения тока во времени
U |
|
|
−t |
|
|
|
|||
|
|
|
|
|
|
||||
i(t)= |
|
1 |
|
|
, |
(2) |
|||
|
−exp |
T |
|
||||||
|
R |
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
||
где R – активное сопротивление обмотки; Т1 = L1 / R и L1 – соответственно постоянная времени и индуктивность обмотки при начальном зазоре δ.
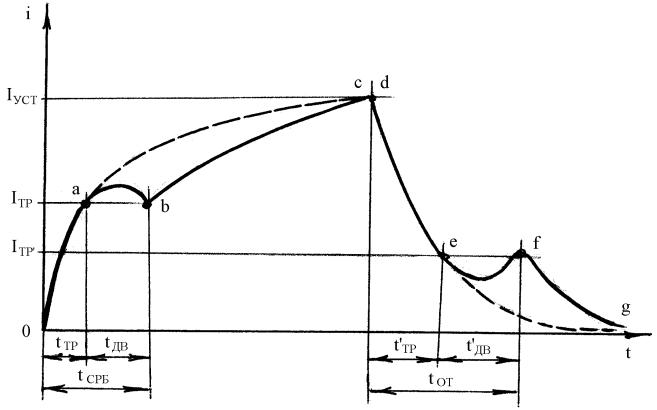
Зависимость i(t) на первом этапе (трогание) представлена участком 0а (рис. 3). Так как этот этап заканчивается при i = IТР, то из (2) можно найти время трогания при срабатывании ЭМР:
tТР =Т1 ln |
U / R |
или |
tТР |
= Т1 ln |
|
|
1 |
|
|
; |
(3) |
|
(U / R)− IТР |
1 |
−(IТР |
/ IУСТ ) |
|||||||||
|
|
|
|
|
|
|||||||
где IУСТ = U / R – ток в катушке при установившемся режиме. Приближённое значение тока трогания IТР при срабатывании реле
при FЭ = FМЕХ
|
|
δ |
0 |
|
2F |
|
|
IТР |
≈ |
|
|
МЕХ . |
(4) |
||
ω |
|||||||
|
|
|
(µ0 s) |
|
|||
В ЭМР параметр срабатывания IТР (4) регулируется изменением
FМЕХ, δ0, ω.
7
Рис. 3. Изменение тока в катушке ЭМР при его включении и отключении
Второй этап процесса срабатывания ЭМР (этап движения) характеризуется уменьшением зазора между сердечником и движущимся якорем, что приводит к уменьшению индуктивности катушки.
Уравнение электрического равновесия ЭМР (1) при движении якоря и L = var имеет вид
U = iR + L(δ ) |
di |
dL dδ |
|
||||
|
+i |
|
|
|
. |
(5) |
|
dt |
|
|
|||||
|
dδ |
dt |
|
||||
Согласно уравнению (5), движение якоря и вследствие этого изменение L приводит к уменьшению тока (участок ab, рис. 3) и электромагнитной силы FЭ. Как только якорь притягивается к сердечнику, L не меняется и ток начинает возрастать (участок bc) при другом значении постоянной времени Т2 = L2 / R, L2 – индуктивность катушки ЭМР при втянутом якоре (δ = 0).
На основании уравнения движения якоря
|
|
d |
2 |
x |
|
|
FЭ − FМЕХ |
|
|
|
(6) |
||
|
|
|
||||
= m |
dt |
|
||||
|
|
|
|
|||
можно определить время его движения при срабатывании реле, считая FЭ – FМЕХ = const для нулевых начальных значений; из (6) получим
8
t ДВ = |
|
2mx |
|
, |
(7) |
|
− F |
||||||
|
(F |
) |
|
|
||
|
Э |
МЕХ |
|
|||
где m – масса якоря, кг; х – перемещение якоря, м; FЭ, FМЕХ – соответствующая электромагнитная тяговая и механическая противодействующие силы, Н.
При включении реле и замыкании катушки накоротко ток в ней спадает по экспоненте
U |
|
−t |
|
|
|
||
|
|
|
|
||||
i(t)= |
|
exp |
|
|
. |
(8) |
|
|
|
||||||
|
R |
T |
|
|
|||
|
|
|
|
2 |
|
|
|
Спадание тока при втянутом якоре показано участком кривой de. |
|||||||
Ток в реле быстро спадает от установившегося значения IУСТ до значе- |
|||||||
ния тока трогания при отпускании I’ |
ТР. Вследствие уменьшения элек- |
||||||
тромагнитной тяговой силы при FЭ < FМЕХ якорь начинает двигаться. В результате увеличивается зазор δ между якорем и сердечником и уменьшается индуктивность катушки L, что приводит к возрастанию тока (участок ef). После полного отпускания якоря (точка f) ток реле будет падать по экспоненте с постоянной времени T1 = L1 / R. Если реле выключить простым размыканием цепи катушки, то ток в реле быстро падает с постоянной времени T = h / (R + Ru), где Ru – сопротивление искрового промежутка между контактами, разрывающими цепь катушки.
Время отпускания tОТП так же как и время срабатывания ЭМР, состоит из двух составляющих – времени трогания при отпускании и
времени движения: tОТП = t’ТР + t’ДВ.
Время трогания при отпускании можно определить, используя формулу (8):
|
|
|
I уст |
|
|
|
tтр' |
= T2 |
ln |
. |
(9) |
||
' |
||||||
|
|
|
|
|
||
|
|
|
I тр |
|
|
Время движения якоря при отпускании реле можно приближённо определить из (7), если принять FЭ = 0.
В автоматике и телемеханике часто встречается необходимость ускорения или замедления работы ЭМР. Для получения быстродействующих ЭМР или ЭМР замедленного действия применяют различные конструктивные способы:
9
-чтобы снизить tСРБ и tОТ – уменьшение вихревых токов в магнитопроводе и хода якоря, равного δн – δк, выбор достаточно большого kз.срб, оптимизация размеров обмотки и др.;
-чтобы увеличить tСРБ и tОТ – электромагнитные, механические, пневматические и гидравлические демпферы, присоединяемые к якорю.
Этими средствами можно снизить tСРБ и tОТ до нескольких миллисекунд и увеличить их до десятков секунд и более.
Электрические мосты предусматривают применение таких схем, которые изменяют спадание или нарастание магнитного потока. На рис. 4 представлены схемы включения ЭМР, способствующие замедлению срабатывания контактов.
Например, шунтирование катушки (рис. 4, а) резистором RШ вызывает при отключении питания схемы спадание магнитного потока и индуктирование в катушке ЭДС, которая создаёт ток, замыкающийся
через резистор RШ. Этот ток создаёт магнитный поток в ЭМР, направленном так же, как и основной магнитный поток, в результате чего спадание потока замедляется и время отпускания увеличивается. Одна-
ко наличие RШ вызывает дополнительную потерю мощности. Шунтирование же катушки ЭМР ёмкостью (рис. 4, б) способству-
ет увеличению как времени срабатывания, так и отпускания. В момент включения весь ток проходит не через катушку, а через ёмкость С. По мере зарядки ёмкости ток в обмотке ЭМР возрастает и с некоторым замедлением реле срабатывает. При полной зарядке ёмкости весь ток проходит через обмотку. При выключении выключателя ёмкость С разряжается через обмотку реле, замедляя время отпускания контактов.
При включении ЭМР по схеме, представленной на рис. 5, а, в начальный момент времени после включения сопротивление незаряженной ёмкости С для постоянного тока равно нулю; сила тока в обмотке имеет большое значение, вследствие чего реле срабатывает быстрее. По мере зарядки ёмкости её сопротивление постоянному току возрастает. При заряженном конденсаторе его сопротивление равно бесконечности и ток на обмотку проходит только через добавочное сопро-
тивление RД. При выключении В ёмкость разряжается через RД, что не влияет на время отпускания ЭМР.