

В.А. Старовойтов Одноконтурная автоматическая система регулирования расхода жидкости
.pdf10
плавка можно определить состояние прибора (отсутствие трения и засорения).
Ротаметры со стеклянной трубкой изготовляют на давление жидкости или газа не более 0,58 МПа. При более высоких давлениях жидкости или газа, а также для измерения расхода пара применяют ротаметры с металлической конусной трубкой. Показания такого прибора снимают при помощи указателя, соединенного с поплавком стержнем.
Рассмотренные ротаметры имеют недостатки: невозможность регистрации показаний и передачи их на расстояние; недостаточная чёткость шкал приборов.
В АСР используются приборы с металлической трубкой с электрической или пневматической передачей показаний на расстоянии.
4.2. Пневматический регулятор системы «Старт»
Устройство, с помощью которого в системах регулирования обеспечивается автоматическое поддержание технологической величины (в нашем случае расхода) около заданного значения, называ-
ют автоматическим регулятором.
Помимо электронных и гидравлических широкое распространение, особенно в химических технологиях, получили пневматические регуляторы (системы “Старт”), входные и выходные сигналы которых представляют собой давление сжатого воздуха, измеряющегося в пределах от 0,02 до 0,1 МПа . Принцип действия регуляторов основан на компенсации усилий при малых перемещениях чувствительных элементов – мембран или сильфонов [1, с.102;3,
с.111].
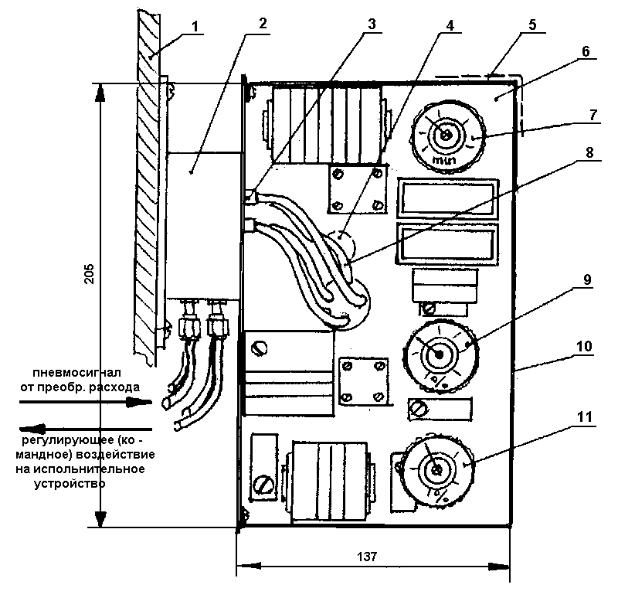
Типичным представителем регуляторов системы “Старт” является устройство регулирующее пневматическое пропорционально – интегральное типа ПР 3.31 – М1 (рис.7).
Данное устройство (регулятор) предназначено для получения непрерывного пропорционально – интегрального регулирующего воздействия давления сжатого воздуха на исполнительное устройство или какое – либо другое устройство системы регулирования с целью поддержания измерительного параметра (расхода) на заданном уровне.
11
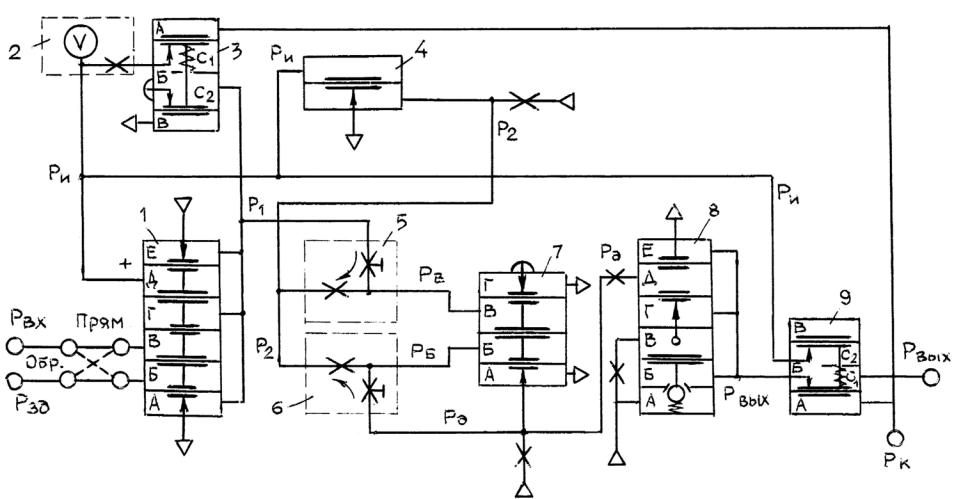
Такого рода воздействия обеспечивает схема, представленная на рис. 8.
Рис.7 Устройство регулирующее пневматическое пропорционально – интегральное ПР 3,31 – М1 (со снятой крышкой): 1 – стенка щита; 2 – гнездо присоединительное; 3 – разъём штекерный; 4 – диск
настройки |
направления |
изменения давления; 5 – кожух (не |
показан |
|||
полностью); |
6 – плата |
из оргстекла с каналами; 7 – орган |
настрой- |
|||
ки времени |
интегрирования; |
8 – гибкая |
трубка 6х1 мм; 9 – орган |
|||
настройки |
предела пропорциональности |
в диапазоне от |
100 до |
|||
5000 %; 10 – рама; 11 – орган |
настройки |
предела пропорционально- |
||||
сти в диапазоне от 2 до 100 % |
|
|
||||
12
Рис. 8. ИП-регулятор ПР 3.31
13
Входной сигнал Рвх , являющийся выходным для преобразователя перепада давлений, пропорциональный расходу в трубопроводе, и заданное давление Рзд (сигнал задания) подводят в камеры В и Б пятимембранного элемента сравнения 1. Его выходной сигнал Р1 направляется в камеру Г, образуя единичную отрицательную
обратную связь, а |
также через выключающее реле 3 и инерцион- |
ный элемент 2 – в |
камеру Д, формируя инерционную положитель- |
ную обратную связь. Сигнал Ри выхода инерционного элемента 2 подводится к маломощному повторителю давления 4 , сигнал с выхода которого Р2 подаётся на дроссельные сумматоры 5 и 6. На сумматор 5 поступает также сигнал Р1, на сумматор 6 - сигнал Рд с выхода трёхмембранного элемента сравнения 7, который далее направляется через постоянный дроссель во входную камеру Д повторителя – усилителя мощности 8. На его выходе формируется выходное давление регулятора Рвых, которое проходит через выключающее реле 9 и поступает в выходную линию регулятора.
Если Рвх =Рзд, то мембранные узлы элементов 1, 4, 7, и 8 находятся в равновесии, и давление на выходе регулятора не изменяется. Повышение давления Рвх относительно давления Рзд приводит к увеличению сигнала Р1, а после прохождения инерционного элемента 2 также и сигнала Ри. Причем сигнал Р1 возрастает более интенсивно , чем сигнал Ри, что вызывает поток воздуха через дроссели сумматора 5 в направлении стрелки, показанной на рисунке. При этом давление Рв в камере В элемента сравнения 7 возрастает, его мембранный блок перемещается вниз, закрывая торцом штока мембран сопло в камере А. В результате этого дав-
ление |
Рд повышается и через дроссели сумматора 6 воздух начи- |
||
нает |
проходить в направлении, показанном стрелкой, и давление |
||
Рб в |
камере |
Б элемента |
сравнения 7 также начинает возрастать. |
Давление Рд |
продолжает |
повышаться до тех пор, пока давление |
|
Рб не станет равным давлению Рв. Увеличение давления Рд в линии входа повторителя 8 вызывает такое же увеличение давления на его выходе и на выходе регулятора. Уменьшение давления Рвх на входе регулятора сопровождается уменьшением давления Рвых на его выходе. Давление на выходе Рвых является выходным (командным) сигналом регулятора, подаваемым на пневматическое исполнительное устройство. При этом выходной сигнал регулятора Рвых (на схеме рис. 1 - х)

14
|
|
1 |
1 |
|
|
Pвых = k( Рвх − Рзд ) + |
|
∫( Рвх − Рзд )dt , |
(3) |
|
|
|||
|
|
Ти 0 |
|
|
где k = |
k3/ k4 - коэффициент передачи пропорциональности состав- |
|||
ляющей |
регулятора; Ти – время интегрирования. Это уравнение под- |
|||
тверждает, что данный регулятор является ПИ – регулятором с независимыми параметрами настройки.
В соответствии с принятыми на схеме рис. 1 обозначениями воздействий закон ПИ – регулирования запишется как [3, с.118]
|
1 |
t |
|
x = ky + |
|
∫ydt , |
(4) |
|
|||
|
Ти 0 |
|
|
а график переходной характеристики (при ступенчатом входном воздействии) может быть представлен как на рис. 9.
Рис. 9. График переходной характеристики ПИ – регулятора
Выключающие реле 3 и 9 необходимы для отключения и включения регулятора при переходе с автоматического на ручное
управление и наоборот. При автоматическом регулировании |
ко- |
|||||
мандный |
сигнал |
Рк =0 и |
выходной сигнал регулятора через сопло |
|||
С1 (реле |
9) проходит на |
выход |
регулятора, а |
сигнал Р1 с выхода |
||
элемента |
1 через |
сопло С1 (реле |
3) - на вход |
инерционного |
эле- |
|
мента 2. Для перехода на ручное управление в выключающие реле подаётся сигнал Рк = 1. В этом случае закрываются сопла С1
15
обоих реле, и сигнал Рвых разъединяется с линией выхода регулятора, а также прерывается линия инерционной положительной обратной связи, проходящая через реле 3. Но при этом выход реле 9 через открытое сопло С2 соединяется с камерой Д элемента сравнения 1 – камерой положительной обратной связи, в которой устанавливается давление, равное давлению в линии выхода регулятора. Это предохраняет линию выхода от скачка давления при промежуточном положении переключателя станции управления и
обеспечивает в последующем плавный переход с ручного |
управле- |
ния на автоматическое. |
|
Для ослабления влияния автоколебаний, возникающих в замк- |
|
нутом контуре сумматор 6 – камера Б элемента 7 – линия |
обратной |
связи сигнала Рд - сумматор 6, на работу повторителя 8 на линии сигнала Рд устанавливают постоянный дроссель.
Предел пропорциональности δ регулятора ПР 3.31 – М1 настраивается в диапазоне от 2 до 5000 % (коэффициент передачи от 0,03 до 50) при помощи регулируемых дросселей сумматоров 5 и 6. При настройке δ в диапазоне 100 - 5000 % дроссель сумматора 6 устанавливают на отметку 100 %, что соответствует его полному открытию (при этом k4 ≈ 1), а дроссель сумматора 5 - на соответствующую отметку по его шкале. В этом случае регулятор реализует закон в соответствии с формулой (3), в которой k = k3; при полном открытии дросселя сумматора 5 величина δ = 100% (k4= 1). При закрывании дросселя значение δ уменьшается.
Время интегрирования Ти настраивается |
дросселем, входящим |
в состав инерционного элемента 2. При этом |
воздействие И – со- |
ставляющей сводится к минимуму и регулятор осуществляет П – закон регулирования. По мере открытия дросселя время Ти уменьшается, а воздействие И – составляющей усиливается. При полностью открытом дросселе Ти = 0,05 мин.
4.3. Пневматическое исполнительное устройство (ИУ)
Пневматические исполнительные устройства входят в отдельную функциональную группу изделий Государственной системы приборов ГСП. Эти устройства занимают в ГСП особое положение, так как являются одновременно элементами системы автоматизации и трубопроводной сети, в которой их устанавливают. Поэтому нормальное функционирование исполнительного устройства
16
зависит от конкретных условий эксплуатации, а характеристики – как от параметров, проходящих через исполнительное устройство среды, так и от конфигурации трубопровода.
Входным сигналом пневматических исполнительных устройств является давление сжатого воздуха в диапазоне 20 – 100 кПа от регулятора, а выходным сигналом – расход вещества или энергии, поступающих в объект регулирования. Пневматические исполнительные механизмы широко применяются в химической промышленности, поскольку они просты по конструкции, надежны и удобны в эксплуатации, пожаробезопасны. Эти устройства характеризуются высоким быстродействием и точностью позиционирования при умеренных усилиях.
На рис. 10 показана структурная схема исполнительного устройства, состоящего из регулирующего органа РО, исполнительного механизма ИМ и дополнительных блоков ДБ (позиционера, ручного дублёра, датчика положения и др.). РО воздействует на объект регулирования, изменяя его пропускную способность. ИМ представляет собой функциональный преобразователь управляющего сигнала регулятора во входной сигнал регулирующего органа. Оба блока связаны между собой обычно штоком ИМ, который передаёт регулирующему органу перестановочное усилие. Перестановочное усилие воспринимается затвором, представляющим собой подвижную часть РО, перемещением которого достигается изменение проходного сечения и пропускной способности. В большинстве конструкций затвор движется относительно неподвижного седла и образует вместе с ним проходное сечение регулирующего органа.
Дополнительные блоки исполнительного устройства предназначены для улучшения динамических и технических характеристик исполнительных механизмов.
По типу привода пневматические исполнительные механизмы делятся на мембранные (мембрано - пружинные) и поршневые.
|
|
|
|
17 |
|
|
|
Y |
|
S |
|
Kv |
|
|
|
ИМ |
РО |
|
|
||||
|
|
|
Рис. |
10. Струк- |
|||
|
|
|
|
|
|||
|
|
|
|
|
турная |
схема |
ис- |
|
|
|
|
|
полнительного |
уст- |
|
|
|
|
|
|
ройства |
|
|
|
|
ДБ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
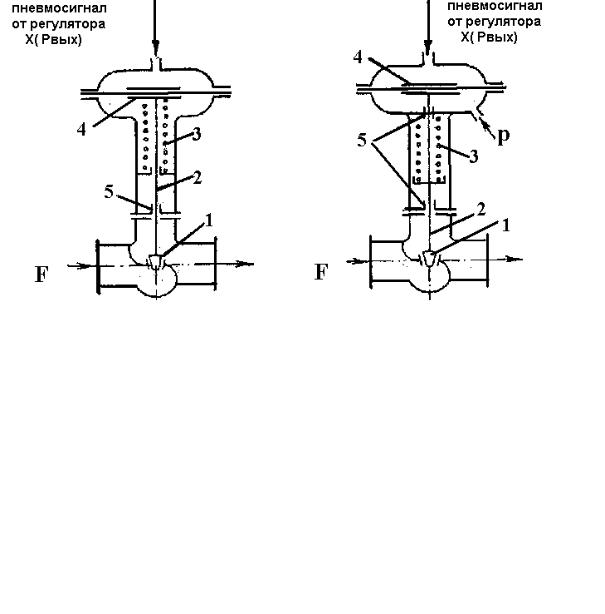
Мембранный исполнительный механизм (МИМ) представляет собой преобразователь давления сжатого воздуха в пропорциональное перемещение выходного элемента (штока, рычага) при величине этих перемещений от 6 до 100 мм. Схема МИМ показана на рис. 11.
а) |
б) |
Рис.11. Мембрано – пружинный исполнительный механизм прямого (а) и обратного (б) действия : 1 – регулирующий орган; 2 – шток; 3 – пружина; 4 – мембрана; 5 – сальник
На схеме вместе с исполнительным механизмом изображен и регулирующий орган 1. Выходной шток 2, соединённый с регулирующим органом 1, в одну сторону перемещается силой, которая создаётся входным давлением Р, поступающим с выхода пневматического регулятора, а в другую – усилием пружины 3. Давление Р передаётся в герметичную мембранную камеру, в которой находится мембрана из резинотканевого материала с жестким центром. Давление Р создаётся усилием, зависящим от эффективной площа-
18
ди мембраны. Пружина противодействует этому усилию; сила противодействия является функцией жесткости пружины. Условие равновесия сил на мембрано-пружинном механизме выражается соотношением
( Р - Рн ) Fэф = сS , |
(5) |
где Р – давление в мембранной камере; Рн – начальное давление, эквивалентное усилию предварительного сжатия пружины; Fэф – эффективная площадь мембраны ; с – жесткость пружины; S - величина хода.
Мембрано-пружинные механизмы имеют устройство для регулирования начального сжатия пружины. От величины этого сжатия зависит начальное давление, при котором начинается движение штока (давление трогания). В обычных пневматических исполнительных механизмах начальное сжатие рассчитано на стандартную величину командного сигнала 0,02 МПа.
Мембранные ИМ бывают прямого и обратного действия. В механизме прямого действия (рис.11,а) повышение давления в мембранной камере приводит к перемещению штока вниз. В механизме обратного действия (рис.11,б) повышение давления в камере приводит к перемещению штока вверх. Это означает, что для регулирующего органа, изображённого на рис.11, механизм обратного действия обеспечивает исполнение «нормально открыт», а механизм прямого действия «нормально закрыт», т.е. при отключении входного сигнала Р в первом варианте произойдет полное открытие, а во втором - полное перекрытие прохода.
Для улучшения технических характеристик мембранные ИМ комплектуют различными дополнительными блоками: усилителями (позиционерами), ручными дублёрами, датчиками и фиксаторами положения, сигнализаторами крайних положений.
19
4.4. Вторичные пневматические измерительные приборы
Вторичные пневматические приборы предназначены для измерения и регистрации технологических параметров, их питание осуществляется осушенным и очищенным от пыли и масла воздухом давлением 140 кПА. Поскольку входные и выходные сигналы унифицированы, вторичные пневматические приборы можно использовать для контроля любых технологических параметров. Шкалы и диаграммы приборов могут быть отградуированы в процентах (100%-ная шкала) или в единицах измеряемого параметра.
Приборы работают совместно с пневматическими датчиками, регуляторами и другими устройствами, выдающими унифицирован- ные аналоговые сигналы в пределах от 20 до 100 кПА (от 0,2 до
1,0 кгс/см2). Предел допускаемой основной погрешности для всех вторичных приборов не превышает ±1,0% от номинального диапазона входного сигнала.
Вторичные приборы осуществляют автоматический контроль, регистрацию технологических параметров объекта и управление работой системы регулирования. Приборы, предназначенные для работы с регуляторами, имеют встроенные станции управления, которыми обеспечивается возможность автоматического ведения процесса, ручного или автоматического программного управления.
Принципиальная схема измерительного устройства является общей для всех вторичных приборов и приведена на рис. 12.
Действие измерительного устройства основано на компенсационном принципе измерения.
Приемный элемент (сильфон 1) воспринимает от датчика (измерительного преобразователя) импульсы давления у. Сжатый воздух от источника питания поступает в линию, сообщающую сопло 2 с силовым элементом 6.
При изменении у изменяется зазор между заслонкой 3 приемного элемента и соплом 2, что приводит к изменению давления
воздуха в линии сопла, |
а, следовательно, в силовом элементе 6. |
При этом перемещается |
сферическая мембрана силового элемента |
и упирающийся в нее рычаг 5, который связан с заслонкой 3 пружиной обратной связи 4. Таким образом, усилие, развивающееся на сильфоне 1 под действием у, уравновешивается усилием на силовом элементе 6. Перемещение рычага 5 силового элемента пере-