

В.А. Старовойтов Определение динамических (переходных) характеристик пневматического пропорционально-интегрального регулятора
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
«КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электропривода и автоматизации
ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ (ПЕРЕХОДНЫХ) ХАРАКТЕРИСТИК ПНЕВМАТИЧЕСКОГО ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО (ПИ) РЕГУЛЯТОРА
Методические указания к проведению лабораторной работы по дисциплинам "Управление техническими системами"
и "Технические средства автоматизации"
для студентов специальностей 170500, 250100, 250400, 250600
Составители В.А. Старовойтов Н.М. Шаулева
Утверждены на заседании кафедры Протокол № 5 от 15.04.02 Рекомендованы к печати учебно-методической комиссией специальности 170500 Протокол № 6 от 20.04.02 Электронная копия хранится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с принципом действия и устройством пневматического пропорционально-интегрального (ПИ) регулятора ПР3.31, а также определить расчетным и экспериментальным путями его динамические (переходные) характеристики.
2.СОДЕРЖАНИЕ РАБОТЫ
2.1.Изучение настоящих методических указаний и технических средств, расположенных на стенде.
2.2.Проведение практических работ для получения динамических (переходных) характеристик регулятора.
2.3.Составление отчета и подготовка его к защите.
3.ТРЕБОВАНИЯ К ОТЧЕТУ
Отчет общий для звена (3-5 чел.) должен включать сведения об исполнителях и цели работы.
Отчет должен содержать таблицу расчетных и экспериментальных данных и, как минимум, один график динамической (переходной) характеристики, представленной в виде соответствующего отрезка диаграммной сетки записывающего прибора, или же ее изображение, перенесенное на кальку.
4. ОБЩИЕ ПОЛОЖЕНИЯ
Комплекс технических средств (устройств), присоединяемых к регулируемому объекту (ОР) и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины (параметра) или автоматическое изменение ее по заданному закону, называют автоматическим регулятором (АР) или же управляющим устройством (УУ). Последние включают в себя конструктивно объединенные или выполненные раздельно исполнительные устройства, датчики, функциональные преобразователи, регулирующие блоки (приборы устройства) и др. Таким образом, не следует отождествлять понятия «автоматический регулятор» и «регулирующее устройство (регулятор)».
2
Из достаточно большой номенклатуры регулирующих устройств на химических производствах широкое распространение получили регуляторы с пропорционально-интегральным алгоритмом управления.
4.1. Устройство регулирующее пневматическое ПР3.31
Устройство регулирующее пневматическое пропорциональноинтегральное с линейными статическими характеристиками ПР3.31 (в дальнейшем – регулятор) входит в систему приборов СТАРТ (система автоматических регуляторов, построенных на элементах универсальной системы промышленной пневматики УСЭППА).
Регулятор может быть использован для работы с датчиками, приборами контроля, задатчиками или другими устройствами со стандартными пневматическими сигналами на выходе и входе.
Регулятор предназначен для получения непрерывного пропорцио- нально-интегрального регулирующего воздействия давления сжатого воздуха на исполнительный механизм или какое-либо другое устройство системы регулирования с целью поддержания измеряемого параметра (расхода, давления, температуры и проч.) на заданном уровне.
Граничные значения рабочего диапазона изменения переменной, задания выходного сигнала соответствуют:
нижнее – 0,2 кгс/см2 (0,02 МПа); верхнее – 1,0 кгс/см2 (0,1 МПа).
Граничные значения диапазона настройки пределов пропорциональности составляют:
нижнее – 2 %; верхнее – 3000 %.
Граничные значения диапазона настройки времени интегрирования составляют: нижнее – 0,05 мин; верхнее – не менее 100 мин на отметке шкалы ∞ (при закрытом сопротивлении).
Давление питания сжатого воздуха 1,4 ± 0,14 кгс/см2 (0,14 МПа). Воздух питания должен быть осушен и очищен от пыли и масла. Давление до стабилизатора – от 3 до 6 кгс/см2.
Предел допускаемой основной погрешности составляет ± 1,0 %. Ocновная погрешность – наибольшее значение входного сигнала, выраженное в процентах его нормирующего значения (0,8 кгс/см2) при установившемся выходном сигнале.
3
Нелинейность статических характеристик, выраженная в процентах от 0,8 кгс/см2, не превышает ± 1,0 % для предела пропорциональности на отметках шкал от 2 до 3000 % (кроме 100 %).
Регулятор обеспечивает передачу пневматических сигналов на расстояние по трассе до 300 м при внутреннем диаметре трубопровода линий передачи 6 мм.
Регулятор может быть использован в пожаро- и взрывоопасных помещениях.
Расход воздуха, приведенный к нормальным условиям, в установившемся режиме до 5,5 л/мин.
4.2. Устройство и работа прибора
Действие регулятора основано на принципе компенсации сил, при котором механические перемещения чувствительных элементов близки к нулю. Вследствие этого регулятор обладает высокой чувствительностью.
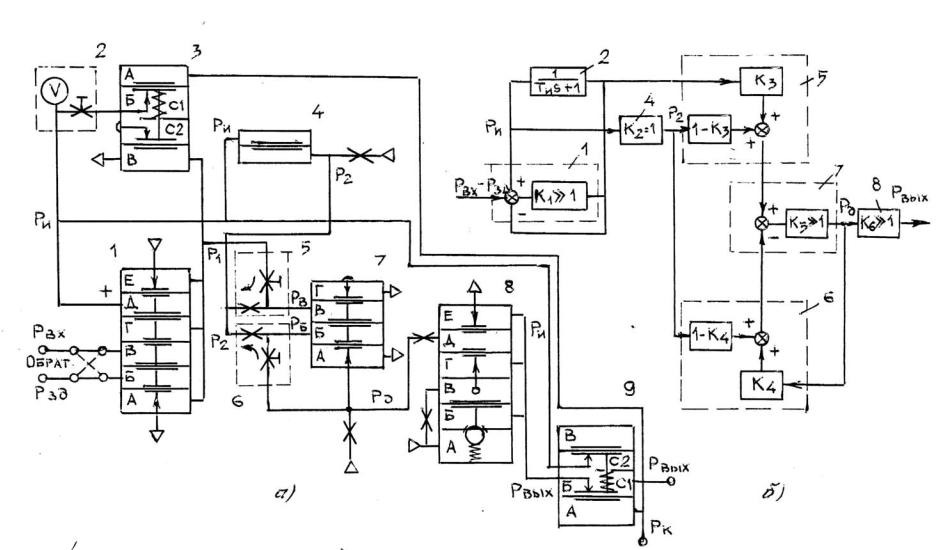
Регулятор состоит в основном из элементов аналоговой техники: пятимембранного и трехмембранного элементов сравнения, повторите- ля-усилителя мощности, повторителя, регулируемых и нерегулируемых пневмосопротивлений, емкости. Кроме того, в регулятор входят дискретные элементы – выключающее реле (рис. 1,а).
Входной сигнал Рвх и заданное давление Рзд подводятся в камеры В и Б пятимембранного элемента сравнения 1. Его выходной сигнал Р1 направляется в камеру Г, образуя единичную отрицательную обратную связь, а также через выключающее реле 3 и инерционный элемент 2 – в камеру Д, формируя инерционную положительную обратную связь. Сигнал Ри выхода инерционного элемента 2 подводится к маломощному повторителю давления 4, сигнал с выхода которого Р2 подается на дроссельные сумматоры 5 и 6. На сумматор 5 поступает также сигнал Р1, а на сумматор 6 – сигнал Рд с выхода трехмембранного элемента сравнения 7, который далее направляется через постоянный дроссель во входную камеру Д повторителя-усилителя мощности 8. На его выходе формируется выходное давление регулятора Рвых, которое проходит через выключающее реле 9 и поступает в выходную линию регулятора.
Если Рвх = Рзд, то мембранные узлы элементов 1, 4, 7 и 8 находятся в равновесии и давление на выходе регулятора не изменяется. Повышение давления Рвх относительно давления Рзд приводит к увеличению
4
сигнала P1, а после прохождения инерционного элемента 2 также и сигнала Ри. Причем сигнал Р1 возрастает более интенсивно, чем сигнал Ри, что вызывает поток воздуха через дроссели сумматора 5 в направлении стрелки, показанной на рисунке. При этом давление Рв в камере В элемента сравнения 7 возрастает, его мембранный блок перемещается вниз, закрывая торцом штока мембран сопло в камере А. В результате этого давление Рд повышается и через дроссели сумматора 6 воздух начинает проходить в направлении, показанном стрелкой, и давление Рб в камере Б элемента сравнения 7 также начинает возрастать. Давление Рд продолжает повышаться до тех пор, пока давление Рб не станет равным давлению Рв. Увеличение давления Рд в линии входа повторителя 8 вызывает такое же увеличение давления на его выходе и на выходе регулятора. Уменьшение давления Рвх на входе регулятора сопровождается уменьшением давления Рвых на его выходе.
Найдем закон регулирования, отрабатываемый регулятором, в соответствии с его структурной схемой, приведенной на рис. 1, б.
Для сумматоров 5 и 6 можно записать уравнения: |
|
Рв = k3P1 +(1 −k3 )P2; |
(1) |
Рб = k4Pд +(1 −k4 )P2 , |
(2) |
где k3 =β1 /(α+β1); 1−k3 = α/(α +β1); k4 =β2 /(α+β2 );
1−k4 = α/(α+β2 ); α – проводимость постоянных дросселей; β1 и β2 – проводимости регулируемых дросселей сумматоров 5 и 6.
Уравнение работы повторителя 4 имеет вид: Р2 = РИ, а повторите-
ля 8 – Рвых=Рд. Подставляя эти значения Р2 и Рд в равенства (1) и (2) и учитывая, что давления Рб и Рв в камерах Б и В элемента 7 практически
равны, получим
k3P1 +(1−k3 )PИ = k4Pвых +(1−k4 )PИ,
откуда
Рвых =(k3 / k4 )P1 +(1−k3 / k4 )РИ.
Запишем это уравнение в операторном виде
Рвых(s)=(k3 / k4 )P1(s)+(1−k3 / k4 )РИ(s) (3)
и найдем выражения Р1(s) и Ри(s) из передаточных функций регулятора
по каналам (Рвх–Рзд)→Р1 и (Рвх–Рзд)→Ри. Обозначим их через W*1(s) и W*и(s).
5
Рис. 1. ПИ-регулятор ПР3.31 (а) и его структурная схема (б)

6
Структурные схемы этих каналов приведены на рис. 2. Обозначим разность Рвх–Рзд через ∆Р и запишем ее в операторной форме ∆P(s). Передаточные функции элемента сравнения 1 и инерционного элемента 2 определяются выражениями W1(s)=k1>>1 и Wи(s)=1/(Тиs+1), где Ти – постоянная времени инерционного элемента 2.
Рис. 2. Структурная схема регулятора ПР3.31 по каналам
(Рвх–Рзд)→Р1 (а) и (Рвх–Рзд)→Ри (б)
Передаточные функции W*1(s) и W*и(s) найдем из равенств: |
||||||||||||||||||||||||||||
|
|
|
W*(s) |
= |
P1(s) |
= |
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
= |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 |
|
∆P(s) 1 + k1[1−1/(TИs +1)] |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
= |
|
|
|
|
1 |
|
|
|
|
|
|
= |
|
TИs +1 |
|
|
=1 + |
|
|
1 |
; |
|||||||
1/ k +1 |
−1/ |
(T s + |
1) |
T s +1 − |
1 |
|
|
T s |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
И |
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
И |
|
||||||
|
|
|
|
W* (s)= |
PИ(s) |
= |
|
|
k1 1/(TИs +1) |
|
= |
|
|
|
|
|
||||||||||||
|
|
|
|
1+k1 −k1 /(TИs + |
1) |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
И |
|
|
∆P(s) |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
1/(TИs +1) |
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|||||||||
|
= |
|
|
|
= |
|
= |
|
. |
|
||||||||||||||||||
|
1/ k +1−1/(T s +1) |
T s +1−1 |
T s |
|
||||||||||||||||||||||||
|
|
|
1 |
|
|
|
И |
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
И |
|
|||||
Найдем величины P1(s) и Ри(s):
Р1(s)=(1+1/Тиs) ∆Р(s); Ри(s)=(1/Тиs) ∆Р(s).

|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя эти зависимости |
в уравнение |
(3), получим: |
|||||||||||||||||||||
|
|
k3 |
|
|
|
|
1 |
|
|
|
k3 |
|
1 |
|
|
∆P(s)= |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Pвых(s)= k |
4 |
1 |
+ T s ∆P(s)+ 1 |
− k |
4 |
T s |
|||||||||||||||||
|
|
|
|
|
|
|
И |
|
|
|
|
|
И |
|
|
|
|
|
|||||
|
|
k3 |
|
|
|
1 |
|
|
|
k3 |
|
|
|
|
|
|
|
|
|
|
|
||
k3 |
|
|
|
|
|
|
|
|
|
|
|
k3 |
|
|
|
1 |
|||||||
= |
+ |
|
|
+ |
|
|
|
|
− |
|
|
|
∆P(s)= |
|
|
+ |
|
|
∆P(s). |
||||
k4ТИs |
ТИs |
|
|
|
|
|
|||||||||||||||||
k4 |
|
|
|
|
k4ТИs |
|
|
k4 |
|
|
|
ТИs |
|||||||||||
Переходя к оригиналам и заменяя ∆Р через разность Рвх–Рзд, получим следующее уравнение динамики регулятора ПР3.31:
Рвых = k(Рвх −Рзд)+ |
1 |
∫t (Рвх −Рзд)dt, |
(4) |
|
|||
|
ТИ 0 |
|
|
где k = k3/k4 – коэффициент передачи пропорциональной составляющей регулятора; Ти – время интегрирования. Это уравнение подтверждает, что регулятор ПР3.31 является ПИ-регулятором с независимыми параметрами настройки.
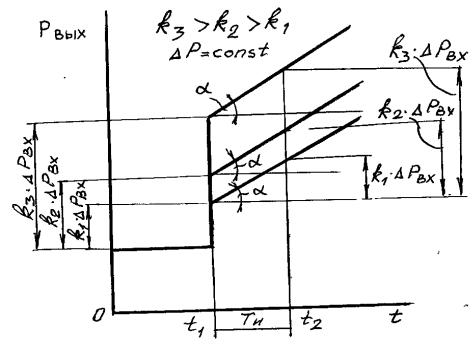
В соответствии с уравнением динамики (4) переходная характеристика ПИ-регулятора при подаче на его вход ступенчатого (скачкообразного) сигнала ∆Рвх будет выглядеть так, как показано на рис. 3.
Рис. 3. График переходной характеристики (а) и входного воздействия (б) ПИ-регулятора
Как видно из рис. 3,а, скачкообразное изменение входной величины на ∆Рвх, произошедшее в момент времени t1, вызывает изменение
8
выходной величины Рвых (рис. 3, б). Рвых вначале быстро (мгновенно) принимает значение, пропорциональное составляющей, т.е. k∆Рвх. После этого выходная величина равномерно нарастает в соответствии с интегральной составляющей до некоторого момента времени t2, при котором она возрастет еще на величину, равную k∆Рвх. Разница между моментами времени t2 и t1 определяет величину постоянной времени интегрирования Ти или же время изодрома [1, с. 73].
При этом изменение только коэффициента пропорциональности k не вызывает изменение скорости нарастания интегральной составляющей (рис. 4).
Рис. 4. Характер изменения закона ПИ-регулирования при изменении k
Изменение только времени интегрирования приводит к изменению скорости нарастания интегральной составляющей. Например, увеличение Ти вызывает снижение скорости нарастания (изменение угля
α).
Возвращаясь к рис. 1, следует отметить, что выключающие реле 3 и 9 необходимы для отключения и включения регулятора при переходе с автоматического на ручное управление и наоборот. При автоматическом регулировании командный сигнал Рк= 0 и выходной сигнал регулятора через сопло C1 (реле 9) проходит на выход регулятора, а сигнал Р1 с выхода элемента 1 через сопло С1 (реле 3) – на вход инерционного
9
элемента 2. Для перехода на ручное управление в выключающие реле подается сигнал Рк=1. В этом случае закрываются сопла С1 обоих реле и сигнал Рвых разъединяется с линией выхода регулятора, а также прерывается линия инерционной положительной обратной связи, проходящая через реле 3. Но при этом выход реле 9 через открытое сопло С2 соединяется с камерой Д элемента сравнения 1 камерой положительной обратной связи, в которой устанавливается давление, равное давлению в линии выхода регулятора. Это предохраняет линию выхода от скачка давления при промежуточном положении переключателя станции управления и обеспечивает в последующем плавный переход с ручного управления на автоматическое.
Для ослабления влияния автоколебаний, возникающих в замкнутом контуре сумматор 6 – камера Б элемента 7 – линия обратной связи сигнала Рд – сумматор 6, на работу повторителя 8 на линии сигнала Рд устанавливают постоянный дроссель.
Предел пропорциональности δ регулятора ПР3.31 настраивается в диапазоне от 2 до 3000 % (коэффициент передачи от 0,03 до 50) при помощи регулируемых дросселей сумматоров 5 и 6. При настройке δ в диапазоне 100-3000 % дроссель сумматора 6 устанавливают на отметку 100 %, что соответствует его полному открытию (при этом k4≈1), а дроссель сумматора 5 – на соответствующую отметку по его шкале. В этом случае регулятор реализует закон
Рвых = k3(Рвх − Рзд)+ (1/ ТИ). |
(5) |
При полном открытии дросселя сумматора 5 величина δ равна 100 % (k3=1). По мере закрывания этого дросселя значение δ возрастает.
При настройке δ в диапазоне 2-100 % дроссель сумматора 5 устанавливают на отметку 100 %, что соответствует полному его открытию (при этом k3≈1), а дроссель сумматора 6 – на желаемую отметку по шкале. В таком случае регулятор осуществляет закон
Р |
вых |
= |
1 |
(Р |
вх |
−Р |
зд |
)+(1/ Т |
И |
)t |
(Р |
вх |
−Р |
зд |
)dt . |
(6) |
|
||||||||||||||||
|
|
k4 |
|
|
|
∫ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
Полному открытию дросселя сумматора δ соответствует значение δ=100 % (k4=1). При закрывании дросселя значение δ уменьшается.
Время интегрирования Ти настраивается дросселем, входящим в состав инерционного элемента 2. При закрытом дросселе (при