

И.А. Штефан Управление процессами и объектами в машиностроении. Программа, методические указания и контрольные задания для студентов заочной формы обучения специальности 120100
.pdf30
Рис. 3.3. ЛАЧХ и ЛФЧХ исходной и скорректированной ПС ЧПУ
Определим выражение для расчета значений ЛФЧХ, выделив для
этого мнимую и вещественную части WP (jω ): |
|
|
|
||||||||||||
Wp ( jω ) = |
|
|
k |
|
|
|
|
= |
|
140 |
|
× |
|||
− T T ω2 + j(T |
+ T )ω |
+ 1 |
(1− 0,002ω2 ) + j0,12ω |
||||||||||||
|
(1 |
− |
1 |
2 |
j0,12ω |
1 |
2 |
0,002ω2 ) − |
j140 × 0,12ω |
|
|
||||
× |
0,002ω2 ) − |
= |
140(1− |
. |
|
||||||||||
(1 |
− |
0,002ω2 ) − |
j0,12ω |
|
(1− |
0,002ω2 )2 + |
(0,12ω )2 |
|
|||||||
|
|
|
|
|
|||||||||||
Отсюда
ϕ (ω) = − arctg |
|
|
0,12ω |
. |
(3.14) |
|
− |
0,002ω2 |
|||
1 |
|
|
|||
31
Результаты расчета ЛФЧХ исходной ПС ЧПУ приведены в табл. 3.9, а ее график на рис. 3.3,б.
Таблица 3.9
Значения ЛФЧХ ϕ р(ω )
ω |
0 |
1 |
3,16 |
10 |
31,6 |
50 |
100 |
269,15 |
1000 |
ϕ р (ω ) |
- 0 |
-6,85 |
-21,15 |
-56,31 |
-104,73 |
-123,69 |
-147,72 |
-167,35 |
-176,56 |
2. Определение запаса устойчивости по фазе.
Запас устойчивости по фазе исходной ПС ЧПУ определяем по графику ϕ р(ω ). Из графика видно, что
∆ϕ р (ω )= 12,65° ,
а этого недостаточно для качественной и устойчивой работы ПС ЧПУ, так как ∆ϕ р(ω ) < 30° .
3. Построение ЛАЧХ скорректированной ПС ЧПУ.
Для повышения качества работы и устойчивости ПС ЧПУ включим в систему последовательное КУ. Для построения желаемой ЛАЧХ (то есть ЛАЧХ скорректированной ПС ЧПУ) необходимо определить частоту среза ω сж. Определим время регулирования tp для исходной ПС ЧПУ при условии, что σ = 20 %, а µ = 0. Отсюда имеем, что
|
|
|
|
20 |
− 0,05 |
|
||
3,14 |
|
|
48 |
|
|
|
||
|
|
100 |
||||||
|
≤ tP ≤ |
|
|
|
. |
|||
269,15 |
|
269,15 |
|
|||||
|
|
|
|
|||||
Витоге имеем, что tp исходной системы находится в интервале
(0,012...0,027) с.
Вскорректированной ПС ЧПУ требуется увеличить быстродействие в 2 раза, а перерегулирование σ уменьшить на один процент, то есть
tpдоп ≤ 0,135 с;
σ доп ≤ 19 %.
32
Определим частоту среза ω с, обеспечивающую данные условия, а
именно: |
|
|
|
19 |
|
|
|||
|
|
|
|
− |
|||||
3,14 |
|
|
48 |
|
|
0,05 |
|||
|
|
100 |
|||||||
≤ tp ≤ |
|
|
|
. |
|||||
|
ωc |
|
|
ωc |
|
||||
|
|
|
|
|
|
|
|||
Примем tpж = 0,0134 с. Тогда |
|
|
|
|
|
|
|||
ωСЖ |
= |
48 0,14 |
|
≈ 501,18с− 1. |
|||||
|
|
||||||||
|
|
0,0134 |
|
|
|
|
|
||
Определим сопрягающие частоты ω 2 и ω 3. Частота ω 2 определяется точкой пересечения желаемой ЛАЧХ на средних частотах, проведенной под наклоном -20деб/дек через ω сж = 501,18 с-1 и исходной ЛАЧХ. Из графика получаем, что
ω 2 = 142,86 с-1.
Значение ω 3 приближенно |
выбирается из условия, что ω |
3 = (2...4)ω с , то есть в нашем случае |
|
ω 3 = (1002,36 2004,72) с-1. |
|
Примем ω 3 = 1666,67 с-1.Тогда |
|
lgω |
3 = 3,301. |
В дальнейшем ω 3 может быть скорректирована, если не будет обеспечен требуемый запас устойчивости системы по амплитуде. ЛАЧХ скорректированной ПС ЧПУ приведена на рис. 3.3,а.
4. Определение ЛАЧХ КУ.
ЛАЧХ КУ определяется по выражению
LK (ω ) = LЖ (ω ) – LР(ω ).
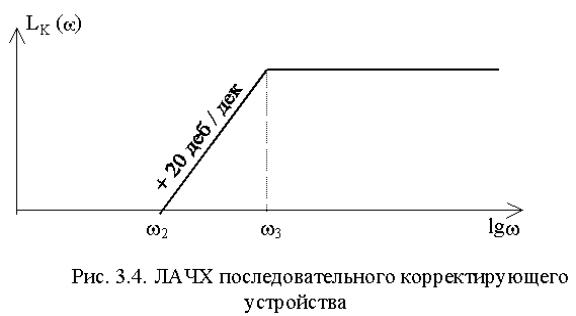
33
Для рассматриваемого КУ ЛАЧХ приведена на рис. 3.4.
5. Выбор КУ.
По табл. 3.7 выбираем КУ с передаточной функцией
WK (p) = |
|
|
k2 (T3p + |
1) |
, |
(3.15) |
|||||||
|
|
|
|
|
T4p + 1 |
|
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
1 |
|
|
|
|
|
|||
T = |
= |
|
|
= 0,007 c, |
|||||||||
ω2 |
|
142,86 |
|||||||||||
3 |
|
|
|
|
|
|
|
||||||
Т4 = |
|
1 |
|
= |
|
1 |
|
|
= |
|
0,0006 с. |
||
|
ω3 |
|
1666,67 |
|
|||||||||
|
|
|
|
|
|
|
|
||||||
Так как на низких частотах 20 lg k2 = 0, то k2 = 1.
Передаточная функция скорректированной разомкнутой ПС ЧПУ
в итоге имеет вид |
|
|
|
|
|
|
WCK (p) = |
k(T3p + |
1) |
|
|
(3.16) |
|
(T1p + 1)(T2p + |
1)(T4p + 1) |
|
||||
|
|
|
||||
или после подстановки численных значений имеем |
|
|
||||
WCK (p) = |
140(0,007p + 1) |
|
. |
|||
|
|
|
|
|||
(0,1p + 1)(0,2p |
+ 1)(0,0006p + |
1) |
||||
|
|
|||||
34
6. Построение ЛФЧХ скорректированной ПС ЧПУ и определение запаса устойчивости по фазе ∆ϕϕ р (ω ).
ЛФЧХ скорректированной ПС ЧПУ определяется так же, как и для исходной. В итоге ЛФЧХ определяется выражением
ϕ Ж (ω) = |
arctg |
|
− |
(15,9ω + |
0,0018ω3 ) |
. |
|
|
− |
0,172ω2 − |
0,0000012ω4 |
||||
|
140 |
|
|||||
Результаты расчета скорректированной ПС ЧПУ приведены в табл. 3.10, а ее график на рис. 3.3,б.
|
|
|
|
|
|
|
|
|
|
Таблица 3.10 |
|
|
|
|
|
Значения ЛФЧХ ϕ |
ж (ω ) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ω |
0 |
1 |
3,16 |
10 |
31,6 |
50 |
|
100 |
269,15 |
501,18 |
1000 |
ϕ ж (ω ) |
0 |
-6,5 |
-20 |
-52,63 |
-93,4 |
-106,3 |
|
-116,63 |
115, |
116,85 |
127,02 |
|
|
|
|
|
|
|
|
|
3 |
|
|
В этом случае имеем, что запас устойчивости по фазе для скорректированной ПС ЧПУ
∆ϕ ж (ω ) = –180° – (–116,85° ) = 63,15° .
Так ∆ϕ ж (ω )=63,15° > 40° , то требуемое условие по устойчивости выполняется.
3.4.5.Оформление контрольной работы
Впояснительной записке приводятся все промежуточные преобразования и результаты расчета по всем четырем задачам, а в графической части должны быть представлены:
- законы изменения управляющих воздействий системами ЧПУ по
обеим координатам ux(t) и uy(t) и законы изменения выходных переменных приводов x(t) и y(t) по результатам решения первых трех задач;
- графики контурной ошибки из задач 2 и 3;
35
- ЛАЧХ и ЛФЧХ исходной и скорректированной позиционной системы ЧПУ и ЛАЧХ корректирующего устройства из задачи 4.
Графическая часть может быть выполнена либо на миллиметровке, либо в виде распечаток с ЭВМ.
4. УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ ПО ДИСЦИПЛИНЕ
4.1. Основная литература
1. Сосонкин В. Л. Программное управление технологическим оборудованием: Учеб. для вузов. − М.: Машиностроение, 1991. − 512 с.
2. Островский М. Я. Системы управления оборудованием гибких производственных систем: Учеб. пособие /М. Я. Островский, В.Н. Тисенко, А. И. Федотов. − Л.: Изд-во ЛПИ, 1986. − 88 с.
3.Асфаль Р. Роботы и автоматизация производства /Пер. с англ. М. Ю. Евстегнеева, Б. И. Копылова, А. С. Чубукова. − М.: Машиностроение, 1989. − 488 с.
4.Теория автоматического управления: Учеб. для машиностроит.
спец. вузов /В. Н. Брюханов, М. Г. Косов, С. П. Протопопов, |
Ю. |
М. Соломенцев, Н. М. Султан-Заде, А. Г. Скиртладзе; Под ред. |
Ю. М. |
Соломенцева. − 2 изд., испр. − М.: Высш. шк., 1999. − 268 с. |
|
5.Устройства числового программного управления: Учеб. пособие для техн. вузов. /И. Т. Гусев, В. Г. Елисеев, А. А. Маслов. − М.:
Высш. шк., 1986. − 296 с.
6.Робототехника и гибкие автоматизированные производства:
В9 кн. Кн. 3. Управление робототехническими системами и гибкими автоматизированными производствами: Учеб. пособие для вузов /И.М. Макаров, В.З. Рахманкулов, В.М. Назаретов, С. А. Блинов, А.М. Ми-
хайлов, С.В. Манько, А.А. Ахрем ; Под ред. И.М. Макарова. − М.:
Высш. шк., 1986. − 159 с.
4.2. Дополнительная литература
7. Автоматизированное управление технологическими процессами: Учеб. пособие /Н.С. Зотов, О.В. Назаров, Б.В. Петелин, В.Б. Яков-
36
лев; Под ред. В. Б. Яковлева. − Л.: Изд-во ЛГУ, 1988. − 224 с.
8. Управление гибкими производственными системами: Модели и алгоритмы /Г. Д. Воронина, В. И. Плескунин, Б. Ф. Фомин, В. Б. Яковлев; Под. ред. С. В. Емельянова. - М.: Машиностроение, 1987. − 386 с.
9. Основы автоматизации управления производством: Учеб. пособие для техн. вузов /И. М. Макаров, Н. Н. Евтихиев, Н. Д. Дмитриева, Д. П. Ким, В. В. Кульба, А. М. Михайлов, В. М. Назаретов, П. Н. Попович, И. Б. Ядыкин; Под ред. И. М. Макарова. − М.: Высш. шк., 1983. − 504 с.
10. Коровин Б. Г. Системы программного управления промышленными установками и робототехническими комплексами: Учеб. пособие для вузов /Б. Г. Коровин, Г. И. Прокопьев, Л. Н. Рассудов − Л.: Энергоатомиздат, 1990. − 352 с.
11. Иванов Ю. В. Гибкая автоматизация производства РЭА с применением микропроцессоров и роботов: Учеб. пособие для вузов /Ю. В. Иванов, Н. А. Лакота − М.: Радио и связь, 1987. − 464 с.
12. Соломенцев Ю. М. Управление гибкими производственными системами / Ю. М. Соломенцев, В. Л. Сосонкин. − М.: Машинострое-
ние, 1988. − 352 с.
13. Программное управление станками: Учеб. для машиностроит. вузов / В.Л. Сосонкин, О.П. Михайлов, Ю.А. Павлов, В.Э. Пуш, И.В. Ханизоменов, Ю.Е. Михеев, В.Н. Шурков, Б. И. Черпаков; Под. ред. В. Л. Сосонкина. − М.: Машиностроение, 1981. − 347 с.
14. Ратмиров В. А. Управление станками гибких производственных систем. − М.: Машиностроение, 1987. − 272 с.
15. Волчкевич Л. И. Комплексная автоматизация производства / Л.И. Волчкевич, М. П. Ковалев, М. М. Кузнецов. − М.: Машинострое-
ние, 1983. − 269 с.
16. Расчет позиционных систем ЧПУ /Сост.: И.А. Штефан, И.А. Хуснутдинов, И. В. Чичерин; Кузбас. гос. техн. ун-т. − Кемерово, 1999. − 14 с.
37
СОДЕРЖАНИЕ
ОБЩИЕ СВЕДЕНИЯ................................................................…..1
1. ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ, ЕЕ МЕСТО |
|
В УЧЕБНОМ ПРОЦЕССЕ ......................................................... |
1 |
1.1. Цель преподавания дисциплины.......................................... |
1 |
1.2. Задачи изучения дисциплины............................................... |
1 |
1.3. Перечень дисциплин, усвоение которых необходимо |
|
для изучения данной дисциплины........................................ |
1 |
2. СОДЕРЖАНИЕ ДИСЦИПЛИНЫ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ЕЕ ИЗУЧЕНИЮ.........................................… 2
2.1. Введение................................................................................. |
2 |
2.2. Системы управления гибкими производственными |
|
системами............................................................................... |
4 |
2.3. Системы программного управления станками.................... |
7 |
2.4. Системы числового программного управления.................. |
8 |
2.5. Системы управления промышленными роботами............. |
13 |
2.6. Групповое управление технологическим |
|
оборудованием...................................................................... |
15 |
2.7. Практические занятия, их наименование и объем |
|
в часах................................................................................... |
16 |
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫ................….17
3.1. Цель работы.......................................................................... |
17 |
3.2. Содержание контрольной работы....................................... |
17 |
3.3. Методические указания....................................................... |
18 |
3.4. Порядок выполнения работы.............................................. |
18 |
4. УЧЕБНО-МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ ПО |
|
ДИСЦИПЛИНЕ....................................................................... |
35 |
4.1. Основная литература............................................................ |
35 |
4.2. Дополнительная литература................................................ |
36 |
38
Составители
Иван Адольфович Штефан Иван Владимирович Чичерин
УПРАВЛЕНИЕ ПРОЦЕССАМИ И ОБЪЕКТАМИ В МАШИНОСТРОЕНИИ
Программа, методические указания и контрольные задания для студентов заочной формы обучения специальности 120100 - "Технология машиностроения"
Редактор Е. Л. Наркевич
ЛР № 020313 от 23.12.96
Подписано в печать 23.11.2000.Формат 60× 84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 2,00. Тираж 50 экз. Заказ Кузбасский государственный технический университет.
650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета.
650099, Кемерово, ул. Д.Бедного, 4 А.