

И.А. Штефан Управление процессами и объектами в машиностроении. Программа, методические указания и контрольные задания для студентов заочной формы(сокращенные сроки обучения)
.pdf20
ux(t), x(t) |
τ пр |
l 

ux(t) |
x(t) |
|
∆ xс
tр |
tп |
t |
|
|
|
|
|
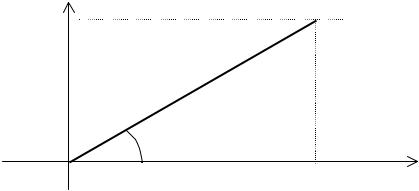
Рис. 3.1. Законы изменения управляющего воздействия системы ЧПУ и выходной переменной привода: tр − время пере-
ходного процесса (tр ≈ 3 Тпр); τ пр − время запаздывания, обусловленное инерционностью привода; ∆ xс - скоростная ошибка.
Скоростная ошибка определяется по формуле:
∆ xc = ux (t) − x(t) = v Tпр ; |
(3.5) |
-определить скоростную ошибку графически и по выражению (3.5) и сравнить между собой полученные значения ошибки;
-определить теоретически и графически время запаздывания τ пр и сравнить полученные значения между собой.
3.4.2. Задача 2
Для решения необходимо:
-определить по данным из табл. 3.3 в соответствии с заданным вариантом время обработки поверхности, приведенной на рис. 3.2,
-определить законы изменения управляющих воздействий по обеим координатам по заданной скорости v по выражениям:
u |
(t) = |
v cosα |
t |
|
ux |
(t) = |
vsin α |
t , |
(3.6) |
y |
|
|
|
|
21
где v − скорость движения по поверхности;
ly 
 y
y
|
|
l |
|
α |
x |
0 |
|
|
|
lx |
Рис. 3.2. Схема обрабатываемой поверхности: l − длина поверхности.
- определить законы изменения выходных переменных по обеим координатам x(t) и y(t) по выражениям (3.4) с заменой скорости v на ее проекции по осям, т. е.
ux (t) = vt cosα ; |
u y (t) = vt sin α ; |
(3.7) |
|
|
Таблица 3.3 |
Исходные данные для задачи 2
Номер ва- |
Добротности |
Скорость |
Длина |
Угол накло- |
∆α |
∆ kvy |
||
рианта |
kvx |
kvy |
v (мм/с) |
l (мм) |
на α (град) |
|||
|
|
|||||||
1 |
10 |
10 |
30 |
80 |
12 |
− |
0,2 |
|
2 |
15 |
16 |
25 |
60 |
10 |
3 |
− |
|
3 |
20 |
20 |
45 |
115 |
8 |
− |
0,25 |
|
4 |
25 |
27 |
35 |
105 |
20 |
2 |
− |
|
5 |
30 |
30 |
35 |
120 |
10 |
− |
0,2 |
|
6 |
35 |
36 |
25 |
75 |
5 |
3 |
− |
|
7 |
40 |
42 |
40 |
105 |
15 |
3 |
− |
|
8 |
45 |
46 |
25 |
100 |
14 |
2 |
− |
|
9 |
50 |
49 |
30 |
95 |
22 |
− |
0,15 |
|
10 |
10 |
12 |
20 |
80 |
10 |
3 |
− |
|
11 |
15 |
15 |
40 |
85 |
12 |
− |
0,25 |
|
12 |
20 |
21 |
50 |
110 |
16 |
2 |
− |
|
13 |
25 |
25 |
20 |
65 |
18 |
− |
0,3 |
|
22
14 |
30 |
28 |
40 |
75 |
20 |
1 |
− |
15 |
35 |
34 |
45 |
120 |
5 |
4 |
− |
16 |
40 |
41 |
35 |
80 |
11 |
− |
0,1 |
17 |
45 |
43 |
25 |
100 |
17 |
2 |
− |
18 |
50 |
50 |
20 |
65 |
30 |
− |
0,5 |
19 |
10 |
11 |
25 |
75 |
25 |
1 |
− |
20 |
15 |
15 |
40 |
85 |
17 |
− |
0,3 |
21 |
20 |
20 |
50 |
95 |
26 |
− |
0,2 |
22 |
25 |
25 |
35 |
95 |
21 |
− |
0,4 |
23 |
30 |
31 |
30 |
80 |
28 |
1 |
− |
24 |
35 |
35 |
50 |
105 |
30 |
− |
0,2 |
25 |
40 |
39 |
20 |
60 |
15 |
3 |
− |
26 |
45 |
43 |
30 |
70 |
10 |
3 |
− |
27 |
50 |
47 |
40 |
100 |
8 |
3 |
− |
28 |
10 |
10 |
25 |
120 |
15 |
− |
0,5 |
29 |
15 |
15 |
35 |
90 |
25 |
− |
0,4 |
30 |
20 |
20 |
45 |
105 |
10 |
− |
0,5 |
-построить графики изменения управляющих воздействий ux(t) и uy(t) и сигналов на выходе приводов по осям x(t) и y(t);
-определить контурную ошибку по выражению
∆ к = |
v |
|
Tпрy − Tпрx |
|
sin 2α |
; |
(3.8) |
|
|
|
|||||||
2 |
||||||||
|
|
|
|
|
|
|
- исследовать влияние на величину контурной ошибки угла наклона поверхности в соответствии с заданным шагом ∆α или соотношения добротностей приводов за счет изменения добротности kvy с заданным шагом ∆ kvy в соответствии с заданным вариантом и построить график изменения контурной ошибки при десяти итерациях.
3.4.3. Задача 3
Для решения необходимо:
- определить по данным из табл. 3.4 в соответствии с заданным вариантом время обработки поверхности tп;
23
|
|
|
|
|
|
|
Таблица 3.4 |
|
|
|
Исходные данные для задачи 3 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
Номер |
kv |
l |
v |
R |
|
∆ R |
|
∆ v |
варианта |
|
|
||||||
|
|
|
|
|
|
|
|
|
1 |
40 |
30 |
20 |
40 |
|
− |
|
3 |
2 |
35 |
60 |
30 |
85 |
|
− |
|
2 |
3 |
30 |
25 |
40 |
40 |
|
2 |
|
− |
4 |
25 |
70 |
35 |
105 |
|
− |
|
2 |
5 |
20 |
50 |
30 |
95 |
|
− |
|
3 |
6 |
15 |
60 |
50 |
80 |
|
2 |
|
− |
7 |
10 |
45 |
50 |
60 |
|
2 |
|
− |
8 |
35 |
50 |
45 |
65 |
|
3 |
|
− |
9 |
30 |
50 |
55 |
70 |
|
2 |
|
− |
10 |
25 |
45 |
35 |
100 |
|
4 |
|
− |
11 |
20 |
35 |
40 |
70 |
|
− |
|
2 |
12 |
15 |
40 |
25 |
40 |
|
5 |
|
− |
13 |
10 |
60 |
45 |
90 |
|
2 |
|
− |
14 |
40 |
40 |
25 |
60 |
|
4 |
|
− |
15 |
30 |
60 |
30 |
100 |
|
− |
|
3 |
16 |
25 |
60 |
30 |
90 |
|
− |
|
2 |
17 |
20 |
50 |
40 |
75 |
|
− |
|
2 |
18 |
15 |
50 |
50 |
80 |
|
2 |
|
− |
19 |
10 |
45 |
60 |
90 |
|
− |
|
1 |
20 |
40 |
55 |
50 |
85 |
|
1 |
|
− |
21 |
35 |
40 |
45 |
80 |
|
2 |
|
− |
22 |
25 |
35 |
35 |
60 |
|
3 |
|
− |
23 |
20 |
45 |
50 |
50 |
|
− |
|
3 |
24 |
15 |
30 |
25 |
50 |
|
− |
|
2 |
25 |
10 |
40 |
30 |
70 |
|
4 |
|
− |
26 |
40 |
50 |
40 |
70 |
|
2 |
|
− |
27 |
35 |
50 |
35 |
100 |
|
− |
|
1 |
28 |
30 |
40 |
30 |
50 |
|
2 |
|
− |
29 |
20 |
30 |
50 |
50 |
|
− |
|
3 |
30 |
15 |
30 |
25 |
50 |
|
3 |
|
− |

24
|
- определить законы изменения управляющих |
воздействий по |
||||||||||||||||||
обеим координатам по формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
u x (t) = |
R cos(ω |
t) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
u y (t) = |
R sin(ω |
|
|
, |
|
|
|
|
|
|
|
|
|
(3.9) |
|||
|
|
|
t) |
|
|
|
|
|
|
|
|
|
||||||||
где ω |
= v / R − угловая скорость движения рабочей точки; |
|
||||||||||||||||||
|
- определить законы изменения выходных переменных приводов |
|||||||||||||||||||
по обеим координатам x(t) и y(t) по выражениям |
|
|
|
|
|
|
|
|
||||||||||||
|
x(t) = |
R |
|
cos(ω |
t − |
ϕ |
) − |
|
|
R |
|
|
|
e |
− t Tпр |
|
|
|||
|
ω |
2 + |
|
2 |
2 |
+ |
1 |
|
|
|
|
|||||||||
|
T2 |
1 |
|
|
|
|
|
Tпрω |
|
|
|
|
|
|
|
|||||
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) = |
R |
|
sin(ω |
t − |
ϕ ) + |
|
R |
|
|
e |
− t Tпр |
, |
(3.10) |
||||||
|
ω |
2 + |
Tпр2 ω 2 |
+ |
1 |
|
|
|
|
|
||||||||||
|
T2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
ϕ = arctg(ω Tпр ) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-построить графики изменения управляющих воздействий ux(t) и uy(t) и сигналов на выходе приводов по осям x(t) и y(t);
-определить контурную ошибку по формуле
|
|
|
|
1 |
|
|
|
|
|
∆ к = |
R |
1− |
T2 |
+ |
1 |
|
; |
(3.11) |
|
|
|
|
ω 2 |
|
|||||
|
|
|
пр |
|
|
|
|
|
|
- исследовать влияние на величину контурной ошибки радиуса, изменяя его с шагом ∆ R или скорости, изменяя ее с шагом ∆ v в соответствии с заданным вариантом и построить график изменения контурной ошибки при десяти итерациях.
3.4.4. Задача 4
Для решения задачи передаточные функции разомкнутой части позиционной системы ЧПУ приведены в табл. 3.5, значения коэффициентов передаточных функций в табл. 3.6, требования к расчету скорректированной системы ЧПУ в табл. 3.7, а характеристики корректирующих устройств в табл. 3.8.
25
Таблица 3.5 Передаточные функции разомкнутой ПС ЧПУ
|
Номер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
передаточной |
|
|
Передаточные функции |
|
|
|
|
|
||||||||||||
|
функции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
Wp (p) = |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
p(T1p + |
1) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
II |
|
|
Wp (p) = |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
(T1p + |
1)(T2p + 1) |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
III |
|
Wp (p) = |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
T2p2 |
+ 2ζ |
T p + |
1 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
IV |
|
Wp (p) = |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p(T p + 1)(T2 p2 |
+ 2ζ |
T p |
+ |
1) |
|
|
|||||||||||||
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.6 |
|||
|
Значения коэффициентов передаточных функций |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Номер варианта |
|
Номер Wp (p) |
|
k |
|
|
|
T1 |
|
|
|
T2 |
|
|
|
ξ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
I |
|
110 |
|
|
|
0,06 |
|
|
|
– |
|
|
|
– |
|
|||
|
2 |
|
II |
|
150 |
|
|
|
0,15 |
|
|
|
0,02 |
|
|
|
– |
|
|||
|
3 |
|
III |
|
150 |
|
|
|
0,04 |
|
|
|
– |
|
|
0,6 |
|
||||
|
4 |
|
IV |
|
190 |
|
|
|
0,06 |
|
|
|
0,04 |
|
|
0,6 |
|
||||
|
5 |
|
I |
|
200 |
|
|
|
0,02 |
|
|
|
– |
|
|
|
– |
|
|||
|
6 |
|
II |
|
150 |
|
|
|
0,07 |
|
0,005 |
|
|
– |
|
||||||
|
7 |
|
III |
|
210 |
|
|
|
|
0,3 |
|
|
|
– |
|
|
0,8 |
|
|||
|
8 |
|
IV |
|
230 |
|
|
|
|
0,1 |
|
|
|
0,05 |
|
|
0,8 |
|
|||
|
9 |
|
I |
|
160 |
|
|
|
0,03 |
|
|
|
– |
|
|
|
– |
|
|||
|
10 |
|
II |
|
180 |
|
|
|
0,05 |
|
0,004 |
|
|
– |
|
||||||
|
11 |
|
III |
|
200 |
|
|
|
|
0,2 |
|
|
|
– |
|
|
0,5 |
|
|||
|
12 |
|
IV |
|
210 |
|
|
|
0,08 |
|
|
|
0,04 |
|
|
0,6 |
|
||||
|
13 |
|
I |
|
220 |
|
|
|
|
0,1 |
|
|
|
– |
|
|
|
– |
|
||
|
14 |
|
II |
|
190 |
|
|
|
0,09 |
|
|
|
0,02 |
|
|
|
– |
|
|||
26
15 |
III |
170 |
0,05 |
– |
0,7 |
16 |
IV |
200 |
0,08 |
0,04 |
0,6 |
17 |
I |
110 |
0,06 |
– |
– |
18 |
II |
150 |
0,15 |
0,02 |
– |
19 |
III |
150 |
0,04 |
– |
0,6 |
20 |
IV |
190 |
0,06 |
0,04 |
0,6 |
21 |
I |
200 |
0,02 |
– |
– |
22 |
II |
150 |
0,07 |
0,005 |
– |
23 |
III |
210 |
0,3 |
– |
0,8 |
24 |
IV |
230 |
0,1 |
0,05 |
0,8 |
25 |
I |
160 |
0,03 |
– |
– |
26 |
II |
180 |
0,05 |
0,004 |
– |
27 |
III |
200 |
0,2 |
– |
0,5 |
28 |
IV |
210 |
0,08 |
0,04 |
0,6 |
29 |
I |
220 |
0,1 |
– |
– |
30 |
II |
190 |
0,09 |
0,02 |
– |
Таблица 3.7
Требования к расчету скорректированной ПС ЧПУ
Номер |
Уменьшить |
Увеличить |
варианта |
перерегулирование на |
быстродействие в |
|
|
|
1 |
1 % |
2 раза |
2 |
3 % |
1,6 раза |
3 |
5 % |
1,5 раза |
4 |
7 % |
1,8 раза |
5 |
2 % |
1,8 раза |
6 |
2 % |
1,7 раза |
7 |
10 % |
1,9 раза |
8 |
4 % |
1,6 раза |
9 |
1,5 % |
1,6 раза |
10 |
4 % |
1,9 раза |
11 |
10 % |
2 раза |
12 |
6 % |
1,8 раза |
13 |
2 % |
1,7 раза |
14 |
4 % |
2,1 раза |
15 |
8 % |
1,9 раза |

|
|
27 |
|
|
|
|
|
16 |
1,5 % |
|
1,8 раза |
17 |
2 % |
|
1,7 раза |
18 |
3 % |
|
1,6 раза |
19 |
5 % |
|
1,9 раза |
20 |
4 % |
|
1,7 раза |
21 |
3 % |
|
2 раза |
22 |
8 % |
|
1,5 раза |
23 |
6 % |
|
1,8 раза |
24 |
2 % |
|
1,8 раза |
25 |
3 % |
|
2 раза |
26 |
10 % |
|
1,6 раза |
27 |
8 % |
|
1,7 раза |
28 |
4 % |
|
1,9 раза |
29 |
5 % |
|
1,7 раза |
30 |
6 % |
|
1,8 раза |
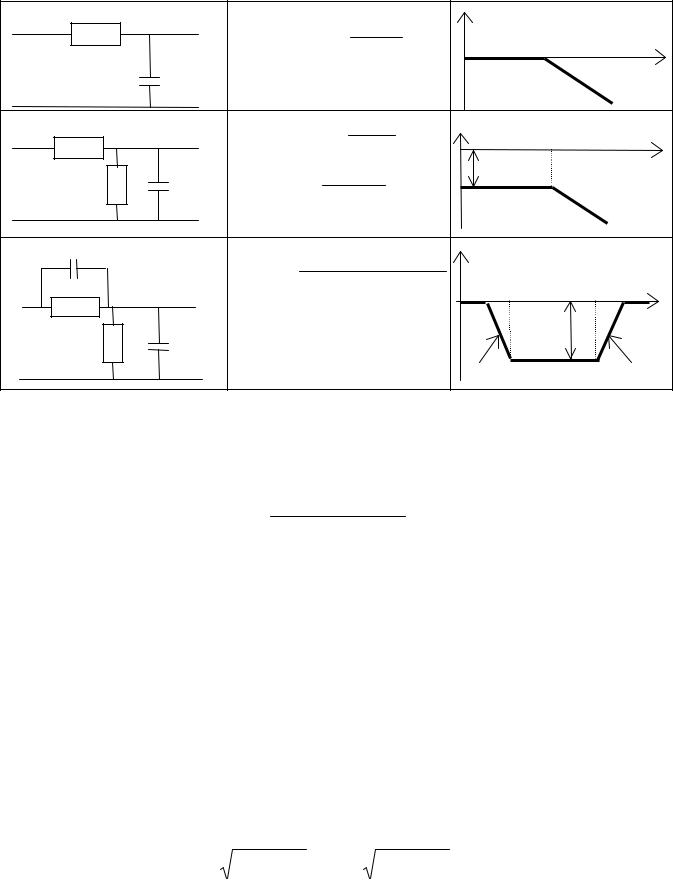
Таблица 3.8
Характеристики корректирующих устройств
Электрическая схема |
Передаточная функция |
ЛАЧХ |
|
|||||||||||||||||||||
|
|
|
R1 |
|
|
|
WК (p) = k |
|
|
|
LК(ω ) |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
UВХ |
R2 |
|
|
UВЫХ |
k = |
|
|
|
R1 |
|
|
|
|
|
20 lg k |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
R1 + R 2 |
|
|
|
|
|
|
lgω |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
Tp |
|
|
|
LК(ω ) |
|
||||||
|
|
|
|
|
|
|
|
|
Wк (p) = |
|
|
|
|
ω =1/Т |
lgω |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
UВХ |
R |
|
|
UВЫХ |
|
Tp + |
1 |
|
|
|
|
|
||||||||||||
|
|
|
|
+ 20 деб/дек |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
Т = К С |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
R1 |
|
|
|
|
|
|
|
Wк (p) = |
|
k(T1p + 1) |
LК(ω ) |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
T2p |
+ 1 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω 1 = 1/ T1; ω 3 = 1/ T2 |
|||||||||
C |
|
|
|
|
|
|
T1 = R1 C |
|
|
|
|
|
|
|
lgω |
|||||||||
|
|
|
|
|
|
|
|
|
R 2 |
|
|
|
|
|
20 lg k |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
UВХ |
R2 |
|
|
UВЫХ |
k = R 2 + R1 |
< |
1 |
|
|
|||||||||||||||
|
|
|
+ 20 деб/дек |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
T2 = k T1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
28 |
|
|
|
|
|
|
R |
|
|
Wк (p) = |
|
1 |
LК(ω ) |
=1/Т |
lgω |
||||
|
|
|
|
Tp + 1 |
ω |
|
||||||
UВХ |
|
C |
UВЫХ |
|
|
|
|
|
|
|
||
|
|
T = R C |
-20 деб/дек |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
R1 |
|
|
|
Wк (p) = |
|
Tp |
LК(ω |
) |
ω =1/Т |
lgω |
||
|
|
|
Tp + 1 |
|||||||||
|
|
|
|
|
|
|
20 lg k |
|
||||
UВХ |
R2 |
C |
UВЫХ |
|
k = |
R |
2 |
|
||||
|
R 2 |
+ |
R1 |
-20 деб/дек |
|
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
Т = С(R2 R1/(R2+R1)) |
|
||||||||
C1 |
|
|
|
|
|
|||||||
|
Wк (p) = |
k(T1p |
+ |
1)(T2p + 1) |
LК(ω ) |
|
|
|||||
|
R1 |
|
(T3p + |
1)(T4 p + 1) |
1/Т2 |
lgω |
||||||
|
|
|
|
1/Т3 |
|
|||||||
|
|
|
T1 = R1 C1;T2 = R 2 C2 |
|
1/Т1 |
1/Т4 |
||||||
UВХ |
R2 |
C2 |
UВЫХ |
T3 T4 = T1 T2 |
|
20lg k |
|
|||||
|
|
|
T3+T4 =T1+T2(1+R1/R2) |
20деб/дек -20деб/дек |
||||||||
|
|
|
|
|
|
|
|
|
||||
|
Расчет позиционной системы ЧПУ показан на примере, в котором |
|||||||||||
в качестве передаточной функции разомкнутой части используется вы- |
||||||||||||
ражение |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
Wр (p) = |
|
|
|
|
|
|
|
|
|
|
|
|
(T p + 1)(T p + 1) , |
|
|
(3.12) |
||||||
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
где k = 140; Т1 = 0,1; Т2 = 0,02. |
|
|
|
|
|
|
|
|
||||
|
Расчет позиционной системы ЧПУ осуществляют в следующем |
|||||||||||
порядке. |
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Построение ЛАЧХ и ЛФЧХ исходной системы ЧПУ. |
|
||||||||||
Заменив p на jω , имеем |
k |
|
|
|
|
|||
Wp (p) = |
|
|
|
. |
(3.13) |
|||
|
|
|
|
|||||
(T1 jω + 1)(T2 jω + 1) |
||||||||
|
|
|
|
|||||
Отсюда |
|
|
|
|
|
|
|
|
L(ω) = 20lgk − |
20lg T2ω2 |
+ 1 − 20lg |
T2 |
ω2 |
+ 1 , |
|||
|
|
1 |
|
2 |
|
|
|
|
где 20 lg k = 20 lg140 = 42,9 деб.

|
|
|
|
|
|
|
29 |
|
|
|
|
|
|
|
Сопрягающие частоты определяются следующим образом: |
|
|||||||||||||
|
|
ω |
= |
1 = |
1 = 10; |
lgω = 1; |
|
|
|
|
||||
|
|
1 |
|
T1 |
0,1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ω |
= |
1 = |
1 |
= |
50; |
lgω |
2 |
= |
1,699. |
|
|
|
|
|
1 |
|
T2 |
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ЛАЧХ исходной ПС ЧПУ приведена на рис. 3.3а. |
|
|
||||||||||||
L(ω ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40деб |
|
|
|
|
- 20 деб/дек |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
- 40 деб/дек |
|
|
|
|||
20деб |
|
|
|
|
|
|
|
|
|
|
LЖ(ω ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 20 деб/дек |
|
||
|
|
|
|
1 |
|
|
|
2 ω |
|
|
ω |
сж=501,18 ω 3 |
||
|
|
|
|
|
|
|
2 |
|
ω ср = 269,15 |
lgω |
||||
|
|
|
|
(10) |
|
|
(100) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Lр(ω ) |
- 40 деб/дек |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-20 0 |
1 |
3,16 |
|
10 |
31,6 |
50 |
100 |
|
269,15 |
501,18 |
1000 |
1500 |
||
-40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-60 |
|
|
|
|
|
|
|
|
|
|
|
ϕ |
ж(ω ) |
|
-80 |
|
|
|
|
|
|
|
|
|
|
|
|
||
-100 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-120 |
|
|
|
|
ϕ р(ω |
) |
|
|
|
|
|
|
|
|
-140 |
|
|
|
|
|
|
|
|
∆ϕ |
ж(ω |
) |
|
||
-160 |
|
|
|
|
|
∆ϕ р(ω |
) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
-180 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
Рис. 3.3. ЛАЧХ и ЛФЧХ исходной и скорректированной ПС ЧПУ |
||||||||||||||