

Konspekt_lekcij / Lekciya_13
.docЛекция № 13.
Устойчивость дискретных систем.
Линейная дискретная система с постоянными
параметрами (стационарный фильтр)
называется устойчивой, если при
любых начальных условиях и любом
ограниченном входном сигнале
![]() выходной
сигнал
выходной
сигнал![]() также остается ограниченным, то есть
из условия
также остается ограниченным, то есть
из условия
![]() для всех
для всех
![]() следует,
следует,
![]()
Необходимым и достаточным условием устойчивости одномерного стационарного линейного фильтра является следующее требование к его импульсной характеристике:
![]() ,
(13.1)
,
(13.1)
то есть требование сходимости ряда, составленного из модулей отсчетов импульсной характеристики фильтра.
Необходимость. Предположим
сначала, что условие (13.1) не выполняется,
то есть
![]() .
Рассмотрим ограниченную последовательность,
заданную значениями
.
Рассмотрим ограниченную последовательность,
заданную значениями
![]() (13.2)
(13.2)
Так как выходные отсчеты сигнала равны свертке входных отсчетов и значений импульсной характеристики дискретной системы, т.е.
![]() ,
(13.3)
,
(13.3)
то при
![]() отклик системы равен:
отклик системы равен:
![]() (13.4)
(13.4)
Таким образом, последовательность
![]() не ограничена, следовательно, неравенство
(13.1) является необходимым условием
устойчивости системы.
не ограничена, следовательно, неравенство
(13.1) является необходимым условием
устойчивости системы.
Достаточность. Предположим, что
условие (13.1) выполняется, а на вход
поступает ограниченная последовательность
отсчетов сигнала
![]() .
Из формулы (13.3) получаем:
.
Из формулы (13.3) получаем:
![]() (13.5)
(13.5)
Если
![]() ,
то
,
то
![]() и система – устойчива.
и система – устойчива.
Устойчивость нерекурсивных дискретных
систем. Как ранее отмечалось, в
нерекурсивных дискретных системах для
вычисления очередного отсчета выходного
сигнала
![]() используются только отсчеты входного
сигнала
используются только отсчеты входного
сигнала
![]() .
Поэтому алгоритм работы такой системы
имеет вид:
.
Поэтому алгоритм работы такой системы
имеет вид:
![]() (13.6)
(13.6)
Системная (передаточная) функция такой
системы является рациональной функцией,
то есть полиномом степени
![]() комплексного аргумента
комплексного аргумента
![]() :
:
![]() .
(13.7)
.
(13.7)
Нерекурсивные стационарные линейные
фильтры обладают замечательной
особенностью: их импульсные характеристики
![]() имеют конечное число ненулевых отсчетов,
причем эти отсчеты равны коэффициентам
имеют конечное число ненулевых отсчетов,
причем эти отсчеты равны коэффициентам
![]() алгоритма фильтрации. Действительно,
в соответствии с (9.22) и (13.7):
алгоритма фильтрации. Действительно,
в соответствии с (9.22) и (13.7):
![]()
![]() .
(13.8)
.
(13.8)
Отсюда следует, что
 (13.9)
(13.9)
Таким образом, импульсная характеристика нерекурсивного стационарного линейного фильтра имеет конечное число отличных от нуля отсчетов, и в соответствии с (13.1) такой фильтр всегда устойчив. Свойство (13.9) обусловило еще одно название таких фильтров – фильтры с конечной импульсной характеристикой (КИХ-фильтры).
Устойчивость рекурсивных дискретных систем. Для рекурсивных дискретных систем использовать критерий устойчивости в форме (13.1) затруднительно, поскольку необходимо суммировать бесконечный ряд модулей отсчетов импульсной характеристики. Выразим критерий (13.1) в другой форме, удобной для исследования рекурсивных фильтров.
Рассмотрим физически реализуемый фильтр
![]() порядка с системной функцией
порядка с системной функцией
![]() и
для простоты предположим, что все полюсы
и
для простоты предположим, что все полюсы
![]() простые.
Отметим, что для физически реализуемых
фильтров степень полинома в числителе
не превышает степень полинома в
знаменателе. Импульсная характеристика
такого фильтра определяется соотношением:
простые.
Отметим, что для физически реализуемых
фильтров степень полинома в числителе
не превышает степень полинома в
знаменателе. Импульсная характеристика
такого фильтра определяется соотношением:
![]() .
(13.10)
.
(13.10)
Для
![]() имеем:
имеем:
 , (13.11)
, (13.11)
а при
![]() имеем
следующее выражение:
имеем
следующее выражение:
![]() .
(13.12)
.
(13.12)
Представляя полюсы
![]() в виде:
в виде:
![]() ,
полагая при этом что
,
полагая при этом что
![]() ,
(13.13)
,
(13.13)
можно записать следующее соотношение:
 (13.14)
(13.14)
Так как функция
![]() аналитична
в окрестностях точек
аналитична
в окрестностях точек
![]() и
и
![]() ,
то
,
то
![]() и все вычеты
и все вычеты
![]() конечны,
то есть
конечны,
то есть
![]() для
для
![]() .
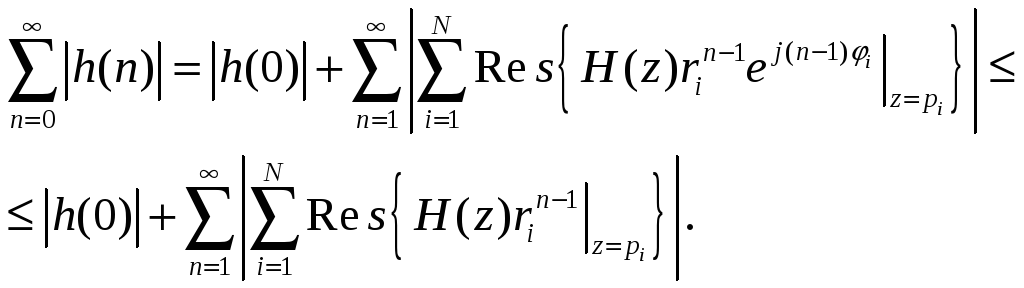
Поэтому из (13.13) и (13.14) следует:
.
Поэтому из (13.13) и (13.14) следует:
![]() .
(13.15)
.
(13.15)
Так как по условию (13.13)
![]() ,
то ряд в правой части соотношения (13.15)
сходится и
,
то ряд в правой части соотношения (13.15)
сходится и
![]() .
Таким образом, соотношение (13.13)
представляет собой достаточное условие
устойчивости фильтра.
.
Таким образом, соотношение (13.13)
представляет собой достаточное условие
устойчивости фильтра.
Итак, если полюса функции
![]() лежат внутри круга единичного радиуса
Z-плоскости, то такой
фильтр устойчив. Если хотя бы один полюс
лежат внутри круга единичного радиуса
Z-плоскости, то такой
фильтр устойчив. Если хотя бы один полюс
![]() расположен на единичной окружности
расположен на единичной окружности
![]() или во внешней части круга единичного
радиуса, то такая
или во внешней части круга единичного
радиуса, то такая
![]() представляет неустойчивый фильтр.
Заметим, что положение нулей системной
функции
представляет неустойчивый фильтр.
Заметим, что положение нулей системной
функции
![]() не
влияет на устойчивость фильтра.
не
влияет на устойчивость фильтра.
Недостатки полюсного критерия устойчивости обусловлены необходимостью определения корней характеристического уравнения, являющихся полюсами системной функции. Аналитических методов решения алгебраических уравнений, порядок которых выше четвертого, не существует. Поэтому нахождение полюсов системной функции высокого порядка возможно лишь численными методами.
Существуют алгебраические и частотные критерии устойчивости стационарных линейных дискретных систем, позволяющие судить об устойчивости фильтра без нахождения корней характеристического уравнения. Например, критерий Джури, аналогичный критерию Рауса-Гурвица для аналоговых систем.
Пример. Проверить на устойчивость следующий рекурсивный фильтр 2порядка.

Решение. Запишем два уравнения относительно двух сумматоров в Z-преобразованой форме:
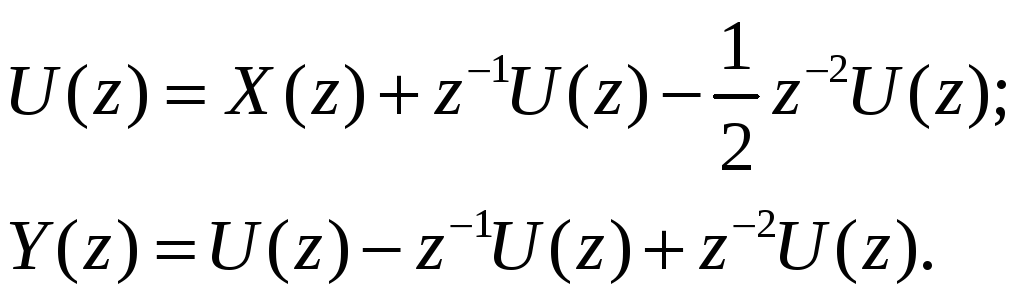 (13.16)
(13.16)
Из (13.6) определяем системную функцию такого фильтра:
![]() (13.7)
(13.7)
где
![]() корни характеристического уравнения,
являющиеся полюсами системной функции.
Так как
корни характеристического уравнения,
являющиеся полюсами системной функции.
Так как
![]() и
и
![]() ,
следовательно, полюса системной функции
,
следовательно, полюса системной функции
![]() лежат внутри круга единичного радиуса,
и фильтр является устойчивым.
лежат внутри круга единичного радиуса,
и фильтр является устойчивым.
Примечание. Неустойчивый фильтр,
безусловно, неработоспособен в том
случае, когда входной сигнал
![]() действует
неограниченно долго, так как при этом
выходной сигнал
действует
неограниченно долго, так как при этом
выходной сигнал
![]() перестанет зависеть от входного сигнала.
Но он работоспособен и используется на
практике в тех случаях, когда входной
сигнал действует в течение ограниченного
интервала времени. Например, цифровой
интегратор с системной функцией
перестанет зависеть от входного сигнала.
Но он работоспособен и используется на
практике в тех случаях, когда входной
сигнал действует в течение ограниченного
интервала времени. Например, цифровой
интегратор с системной функцией
![]() (эта функция имеет полюс
(эта функция имеет полюс
![]() ,
т.е. фильтр – неустойчив) вполне
работоспособен и используется на
практике, если входной сигнал
,
т.е. фильтр – неустойчив) вполне
работоспособен и используется на
практике, если входной сигнал
![]() действует лишь при
действует лишь при
![]() ,
после чего следует сброс и восстановление
начальных условий. Цифровой интегратор
может входить в состав замкнутой следящей
системы. При этом за счет обратной связи
система может обладать устойчивостью,
несмотря на то, что интегратор, являющийся
динамическим звеном системы, неустойчив.
,
после чего следует сброс и восстановление
начальных условий. Цифровой интегратор
может входить в состав замкнутой следящей
системы. При этом за счет обратной связи
система может обладать устойчивостью,
несмотря на то, что интегратор, являющийся
динамическим звеном системы, неустойчив.