

TEST_TAU
.docx
*Локальное управление технологическим процессом включает в себя: контроль технологических параметров, регулирование, сигнализацию, защиту и БЛОКИРОВКА
*Контроль технологических параметров – это процесс их преобразования в форму, удобную для НАБЛЮДЕНИЕ или последующего использования в системе управления
*Автоматическое регулирование – это процесс целенаправленного воздействия на ОБЪЕКТ управления
* В разомкнутых системах регулирования используется принцип управления «По возмущению», а в замкнутых системах – принцип управления ОТКЛОНЕНИЕ
*Обобщенной метрологической характеристикой измерительного средства является его класс ТОЧНОСТЬ
*Положение рабочей точки в области УСТОЙЧИВОСТЬ систем регулирования определяется параметрами настройки регулятора.
*Номинальная статическая (градуировочная) характеристика термопары – это зависимость ее термоЭДС от ТЕМПЕРАТУРА.
* Статические и динамические параметры объекта управления могут быть определены по кривой РАЗГОН.
* Амплитуда и период АВТОКОЛЕБАНИЕ, а также статическая ошибка регулирования являются показателями качества нелинейного регулирования.
*Перерегулирование, время регулирования и максимальное динамическое отклонение регулируемого параметра от заданного значения являются показателями качества ЛИНЕЙНОГО регулирования.
*Технологическая защита применяется в системах управления для: !ПРЕДОТВРАЩЕНИЯ РАЗВИТИЯ АВАРИЙНЫХ СИТУАЦИЙ!
*При поверке измерительного прибора диапазон измерения образцового средства должен быть: !РАВЕН ИЛИ БОЛЬШЕ ДИАПАЗОНА ИЗМЕРЕНИЯ ПОВЕРЯЕМОГО ПРИБОРА!
*При поверке измерительного прибора используют методы: !СРАВНЕНИЯ ПОКАЗАНИЙ ПОВЕРЯЕМОГО ПРИБОРА И ОБРАЗЦОВОГО СРЕДСТВА!
*При измерении температуры с помощью термометров сопротивления наибольшую помехоустойчивость и точность обеспечивают:!ЧЕТЫРЕХПРОВОДНЫЕ СХЕМЫ!
*Запаздывание объекта управления: !ОТРИЦАТЕЛЬНО СКАЗЫВАЕТСЯ НА КАЧЕСТВЕ РЕГУЛИРОВАНИЯ!
*При увеличении коэффициента передачи регулятора устойчивость замкнутой системы регулирования: !СНИЖАЕТСЯ!
*При увеличении времени интегрирования изодромного регулятора устойчивость замкнутой системы регулирования: !ПОВЫШАЕТСЯ!
*Самое низкое быстродействие имеют системы регулирования, использующие: ! И – РЕГУЛЯТОРЫ!
*Самое высокое значение максимального динамического отклонения наблюдается в системах регулирования, использующих:!И – РЕГУЛЯТОРЫ!
*При измерении технологических параметров наибольшую точность обеспечивает:!КОМПЕНСАЦИОННЫЙ_МЕТОД!
*Установите соответствие передаточной функции регулятора и его названием
![]() !Пропорциональноинтегральнодифференциальный!
!Пропорциональноинтегральнодифференциальный!
![]() -
-------------------- !Пропорциональный!
-
-------------------- !Пропорциональный!
![]() ---------------
!Пропорционально-дифференциальный!
---------------
!Пропорционально-дифференциальный!
![]() ---------------!Пропорционально=интегральный!
---------------!Пропорционально=интегральный!
*Установите соответствие между классификационным признаком и названием прибора.
Мембранный---Дифманометр Радиационный---Пирометр
Вихреакустический----Расходомер Двухпозиционный---Регулятор
*Установите соответствие между условным графическим обозначением и назначением средства автоматики
 Местный указатель положения регулирующего
органа.
Местный указатель положения регулирующего
органа.
 Станция
управления с переключателем рода работы,
установленная на щите.
Станция
управления с переключателем рода работы,
установленная на щите.
 Регулятор
(контроллер) расхода, установленный на
щите.
Регулятор
(контроллер) расхода, установленный на
щите.
 Бесконтактный
пускатель для включения исполнительного
механизма.
Бесконтактный
пускатель для включения исполнительного
механизма.
*Установите соответствие между формулой расчёта и физическим смыслом
ε = Xзд – X------------!Входной сигнал рассогласования регулятора!
y = KПε----------------!Выходной управляющий сигнал регулятора!
y = KT----------------!Выходной сигнал датчика температуры!
ΔXср = -------------!Статическая ошибка регулирования!
*Установите соответствие между условным графическим обозначением и назначением прибора
 _
--- Датчик расхода
с унифицированным выходным сигналом
_
--- Датчик расхода
с унифицированным выходным сигналом
 -
---- Датчик
температуры (термопара)
-
---- Датчик
температуры (термопара)
 -
- Вторичный
показывающий прибор давления -
-
- Вторичный
показывающий прибор давления -
 ---
Сигнализатор загазованности помещения
---
Сигнализатор загазованности помещения
1Установите соответствие между источником информации и приёмником информации
Физический параметр-----!Первичный преобразователь!
Аналоговый датчик--------!Аналого-цифровой преобразователь!
Цифровой задатчик--------!Управляющий контроллер!
Импульсный регулятор----!Исполнительный механизм постоянной скорости!
* Установите соответствие основного понятия и его синонима
Регулятор-----------------Закон регулирования
Пропорционально-интегральный-----------------Изодромный
Апериодический---------------------Не имеющий перерегулирования
Статический-----------------Устойчивый
*Установите соответствие между элементами и положительными следствиями их применения
Сужающее устройство-----------Перепад давлений
П-регулятор----------------Максимальное быстродействие
Релейный регулятор-----------Возможность управления объектами с большим запаздыванием
ПИД-регулятор---------------Наименьшее значение максимального динамического отклонения
*Установите соответствие между элементами и отрицательными последствиями их применения
Сужающее устройство-------Потеря напора
П-регулятор------Статическая ошибка регулирования
Релейный регулятор------Колебательный характер процесса регулирования
ПИД-регулятор---------Низкая помехоустойчивость
*Установите соответствие метода (применяемой процедуры) и областью его применения
Дифференциальный метод------Измерение технологических параметров
Метод Циглера и Никольса-----Автоматическое регулирование
Метод наименьших квадратов-------Математическое моделирование
Максимизация целевой функции--------Технологическая защита
*Установите соответствие понятиями и определениями
Кибернетика --- Наука об общих закономерностях процессов управления в различных системах (в технике, химии, биологии и т. д.)
Техническая кибернетика-- Раздел кибернетики, рассматривающий общие закономерности процессов управления в различных технических системах
Теория автоматического управления--- Подраздел теории управления
Теория управления----Подраздел технической кибернетики
Автоматика---Отрасль науки и техники, охватывающая совокупность методов и технических средств, освобождающих человека от непосредственного выполнения операций по контролю и управлению производственными процессами и техническими устройствами
*Замена мускульной физической силы человека работой технических устройств называется МЕХАНИЗАЦИЯ.
*Первые учёные-основоположники теории автоматического управления.
!Иван Иванович Ползунов! 1728 – 1766 (поплавковый регулятор питания котла паровой машины, 1765 г.)
!Жозеф Мари Жаккар! 1752 – 1834 (первое программное устройство управления ткацким станком от перфокарты, 1804 – 1808 гг.)
!Джеймс Уатт! 1736 – 1819 (центробежный регулятор скорости паровой машины, 1784 г.)
!Христиан Гюйгенс! 1629 – 1695 (маятниковый регулятор хода часов, 1657 г.).
!Вернер Сименс! 1816 – 1892 (инерциальный регулятор для парового двигателя, 1845 г.).
*Система, состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс, называется системой АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ.
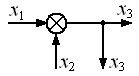
*Установите соответствие между
воздействиями и их положением относительно
объекта управления
Управляемые (регулируемые) параметры-----------y(t)
Управляющие воздействия------------------------------x(t)
Возмущающие (внешние или внутренние) воздействия---f(t)
*Укажите соответствие фундаментальному принципу регулирования соответствующих достоинств и недостатков
Комбинированный---Достоинства и недостатки наследуются от применённых принципов регулирования
Разомкнутого управления---Достоинства: простота реализации; недостатки: может функционировать только при слабых возмущающих воздействиях
Регулирование по отклонению (принцип обратной связи)---Достоинства: отсутствие большого числа измерительной аппаратуры, нет необходимости знать в какой связи находятся внешние возмущения; недостатки: регулирование начинается после того, как на внешнее возмущение среагировал объект управления
Регулирование по возмущению---Достоинства: позволяет быстро компенсировать внешние возмущающие воздействия ещё до реакции на него объекта управления; необходимо иметь много измерительной аппаратуры для отслеживания внешних возмущающих воздействий и сложность определения воздействия их друг на друга
*Совокупность устройств, с помощью которых осуществляется управление главным технологическим параметром (физической величиной), называется устройством управления, или РЕГУЛЯТОР.
*Совокупность соединённых определённым образом элементов (звеньев, блоков) системы по выполняемым ими функциям, независимо от их физической природы, называется ФУНКЦИОНАЛЬНАЯ схемой системы автоматического регулирования.
*Основанием классификации элементов САУ не является:
!Участие человека в САУ!
* Уравнение, определяющее изменение во времени выходной величины по заданному изменению его входной величины, называется уравнением ДИНАМИКИ
* В общем случае для класса непрерывных элементов уравнения динамики являются Дифференциальными или интегро-дифференциальными уравнениями.
* Элементы САУ могут иметь:
!Динамический режим (описывается уравнением динамики)!
!Статический режим (входная и выходная величины не являются функциями времени, и зависимость между ними описывается с помощью статической характеристики или уравнения статики)!
* Замена нелинейного элемента линейной моделью называется ЛИНЕАРИЗАЦИЯ
*Методика составления уравнения движения элемента состоит из следующих этапов:
!Установление физического закона, определяющего поведение элемента!
!Определение факторов, от которых зависят переменные исходного уравнения движения, и установление уравнений связи, характеризующих эту зависимость!
!Замена нелинейного элемента линейной моделью при помощи ряда Тейлора!
* Линейные дифференциальные уравнения, служащие для описания поведения элементов систем управления, можно решить классическим методом или методом, использующим преобразование ЛАПЛАС.
* К преобразованию Лапласа не относятся термины:
!ПОЗИТИВ!
!НЕГАТИВ!
*Типовые возмущающие воздействия, подаваемые на вход элементов САУ, называются СТИМУЛИРУЮЩИМИ СИГНАЛАМИ а выходную величину, получаемую в результате действия возмущения на входе, называют реакцией на данное воздействие.
*Установите соответствие между стимулирующими сигналами и их математическим описанием
|
Единичная функция 1(t) |
1 при t ≥ 0 |
|
Дельта-функция δ(t) |
0 при t ≠ 0 |
|
Единичный гармонический сигнал ejωt |
cosωt + jsinωt |
|
Степенные функции времени |
k1t, k2t2, k3t3 |
 0 при t
< 0
0 при t
< 0 ∞ при t
= 0
∞ при t
= 0
* К функциям, характеризующим частотные свойства элементов САУ, НЕ ОТНОСЯТ:
! Фазо-амплитудную характеристику (ФАХ)!
* Временные динамические характеристики, представляющие собой функции времени, служат для оценки динамических свойств элементов САУ при их исследовании в области действительного переменного t и делящиеся на два вида переходные – h(t) ВЕСОВАЯ – w(t).
*Изображение соединения элементов САУ в виде связанных элементарных звеньев называется СТРУКТУРНАЯ схемой, при этом каждое элементарное звено представлено в виде прямоугольника, в котором записывается его передаточная функция, полностью характеризующая его динамические свойства, связь между звеньями показывается линиями, а направление передачи сигнала стрелкой.
* Установите соответствие между элементарными динамическими звеньями и их передаточными функциями
|
Усилительное (пропорциональное) звено |
W(p) = k |
|
Апериодическое (инерционное) звено |
W(p) = |
|
Интегрирующее звено |
W(p) = |
|
Колебательное звено |
W(p) = |
|
Идеальное дифференцирующее звено |
W(p) = kp |
|
Форсирующее звено первого порядка |
W(p) = k(Tp + 1) |
|
Форсирующее звено второго порядка |
W(p) = T2p2 + 2ξTp + 1 |
|
Звено с запаздыванием (трансцендентное звено) |
W(p) = e−pTЗ |
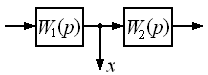
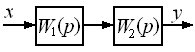
* Передаточная функция последовательно соединённых звеньев равна ПРОИЗВЕДЕНИЕ передаточных функций отдельных звеньев
* Передаточная функция системы, изображённой на рисунке, равна:
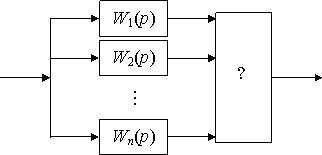
!Сумме передаточных функций отдельных звеньев, входящих в систему!
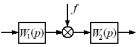
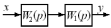
*Передаточная функция встречно-параллельного соединения звеньев, изображенного на рисунке, равна


*Установите соответствие исходной схемы и эквивалентной ей схемы
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|













*При различных соединениях звеньев нельзя добиться: ! ПРЕОБРАЗОВАНИЯ ЗВЕНЬЕВ ДРУГ В ДРУГА!
*Свойство САУ возвращаться в заданный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия называется -УСТОЙЧИВОСТЬ
*Методы, позволяющие оценить устойчивость системы автоматического управления по расположению корней характеристического уравнения без решения самого уравнения, называются КРИТЕРИЙ устойчивости
*Установите соответствие между типом звена и его определением.
Статическое----Звено, регулируемый параметр которого после прекращения действия одного и того же возмущающего воздействия имеет только одно устойчивое значение.
Астатическое (нейтрально-устойчивое)---- Звено, регулируемый параметр которого после прекращения действия одного и того же возмущающего воздействия может иметь бесконечное множество устойчивых значений.
Неустойчивое--- Звено, у которого любое возмущение приводит к разбалансировке системы.
*Основным достоинством аналоговых (непрерывных) регуляторов по сравнению с дискретными (цифровыми) регуляторами при прочих равных условиях является !ВЫСОКОЕ БЫСТРОДЕЙСТВИЕ!
*Установите соответствие между элементами систем и их назначением
|
измерительно-преобразовательные (датчики) |
измерительный орган (чувствительный элемент), преобразующий физическую величину из одного вида в другой, необходимый для воздействия на управляющий орган системы |
|
усилительно-преобразовательные |
элемент, в котором входная и выходная величины имеют одинаковую физическую природу и только преобразуются количественно и (или) качественно |
|
исполнительные |
элементы систем, предназначенные для усиления и отработки управляющего воздействия, приводящего к изменению регулируемого параметра объекта управления |
|
корректирующие |
элементы систем, предназначенные для изменения динамических свойств системы с целью достижения требуемой устойчивости, точности и показателей качества |
|
дискретные |
элемент системы, предназначенный для реализации ступенчатой функции управления |
|
задающие |
элементы систем, предназначенные для выработки сигнала, соответствующего требуемому изменению управляющей координаты |
|
сравнивающие (выявляющие) |
элементы систем, предназначенные для выявления разницы между заданным и текущим значениями регулируемой величины и формирующие полезный сигнал (сигнал ошибки, сигнал рассогласования) |
Измерительный преобразователь представляет собой устройство, осуществляющее измерение действительного значения управляемой или кон- тролируемой координаты и преобразование этого значения в сигнал, наиболее приемлемый для дальнейшей его передачи по каналу управления
*К алгебраическим критериям устойчивости относят?
!ГУРВИЦА! ! РАУССА! !ЛЬЕНАРА-ШИПАРО!
*К показателям, характеризующим качество процесса регулирования, не относят? !ТОКСИЧНОСТЬ!
*Установите, в какую группу методов входят методы синтеза САУ.
Графоаналитические методы инженерного динамического синтеза-----Частотные, корневые, корневого годографа, стандартных переходных характеристик
Аналитические методы------Вариационные методы динамического линейного и нелинейного математического программирования, принцип максимума, метод винера-хопфа, метод модального управления
Методы прямого синтеза----Аналоговое и цифровое моделирование, синтез с использованием ЭВМ и специального программного обеспечения
*Проектирование САУ представляет собой творческий процесс конкретного решения технико-экономической задачи, предполагающий применение АНАЛИЗ и синтеза
*Проектирование САУ при определенных ограничениях, обусловленных условиями эксплуатации, методами проектирования, уровнем технологии и организации производства, называется ЛИНЕЙНЫМ проектированием.