

Chen G.R.Fuzzy PID controllers for industrial applications
.pdfFuzzy PID Controllers for Industrial Applications
G. Ron Chen
Lecture for EE 6452
City University of Hong Kong
Summary
∙Proportional-Integral-Derivative (PID) controllers are the most widely used controllers in industries today
∙Statistics: > 90% controllers in industries are PID or PIDtype of controllers (the rest are programmable logical controllers (PLC))
∙Merits of PID controllers: simple, cheap, reliable, and effective
∙For lower-order linear time-invariant systems and processes, PID controllers have good set-point tracking performance with guaranteed stability
∙Fuzzy logic provides a certain level of artificial intelligence to the conventional PID controllers
∙Fuzzy PID controllers have self-tuning ability and on-line adaptation to nonlinear, time -varying, and uncertain systems
∙Fuzzy PID controllers provide a promising option for industrial applications with many desirable features
Outline of the Presentation
∙Overview of the Fuzzy Logic Technology
∙Overview of Conventional PID Controllers
∙Introduction to Fuzzy PID Controllers
∙Some Successful Examples of Applications
∙Concluding Remarks

Overview of the Fuzzy Logic Technology
Closed-Loop Set-Point Tracking System
Consider the typical set-point tracking system:
r |
+ |
Σ |
e |
Controller |
u |
Plant |
y |
(reference |
(error |
(control |
|
||||
|
|
(output |
|||||
|
signal) |
− |
signal) |
|
signal) |
|
|
|
|
|
|
|
|
|
signal) |
Figure 1 A typical closed-loop set-point tracking system
Objective:
e(t) := r(t) − y(t) → 0 (t→∞)
Approach: Design a fuzzy logic controller (FLC)
e |
Fuzzification |
Fuzzy Rule Base |
Defuzzification |
u |
|
controller |
controller |
||||
|
|
|
|||
input |
|
|
|
output |
|
|
|
Fuzzy Logic Controller (FLC) |
|
|
|
|
Figure 2 General structure of a fuzzy logic controller |
|
|||

temperature |
|
|
b |
c |
y(t ) |
r = 45 o |
d |
|
|
|
|
e(t ) |
|
|
a |
|
|
0 |
|
|
|
t |
Figure 3 Temperature set-point tracking example |
||||
(i) If e > 0 then |
|
|
|
|
e = r − y > 0 |
or |
|
r > y |
|
the output y is at position |
a |
or |
d |
|
(ii) Furthermore, if |
e& < 0 |
then |
|
|
e& = r& − y& = 0 − y& |
|
or |
y& > 0 |
|
(iii) Therefore, the output |
y |
is at position a |
||
Fuzzy Logic Rule Base: |
|
||
R1: |
IF e > 0 |
AND e& < 0 THEN u(t+) = u(t) |
|
R2: |
IF e < 0 |
AND e& < 0 |
THEN u(t+) = − u(t) |
R3: |
IF e < 0 |
AND e& > 0 |
THEN u(t+) = u(t) |
R4: |
IF e > 0 |
AND e& > 0 |
THEN u(t+) = − u(t) |

Fuzzy Controller Design
A. Fuzzification
Purpose: Enable the input physical signal to use the rule base
Approach: Use membership functions |
|
|
|
|
||
1 |
μPS |
μPL |
μNL |
μNS |
1 |
|
|
|
|
||||
0 |
H |
. |
−H |
|
0 |
. |
e, e |
|
e, e |
||||
|
|
(a) |
(b) |
|
|
|
Figure 4 Four membership functions for signals e and e& |
|
|
|
|||
B. Programmable Rule Base
R1: |
IF e = PL AND e& |
R2: |
IF e = PS AND e& |
R3: |
IF e = NL AND e& |
R4: |
IF e = NS AND e& |
R5: |
IF e = NL AND e& |
R6: |
IF e = NS AND e& |
R7: |
IF e = PL AND e& |
R8: |
IF e = PS AND e& |
<0 THEN u(t+) = μP L(e) . u(t)
<0 THEN u(t+) = (1−μPS(e)) . u(t)
<0 THEN u(t+) = −μNL(e) . u(t)
<0 THEN u(t+) = −(1−μNS(e)) . u(t)
>0 THEN u(t+) = μNL(e) . u(t)
>0 THEN u(t+) = (1−μNS(e)) . u(t)
>0 THEN u(t+) = −μPL(e) . u(t)
>0 THEN u(t+1) = −(1−μPS(e)) . u(t)
To implement the FLC on a digital computer:
u(t) = u(kT) and u(t+) = u((k+1)T)
where T is the sampling time.
R1: |
IF e(kT) = PL AND e& (kT) < 0 |
|||||
|
THEN u((k+1)T ) = μ (e(kT)) . u(kT) |
|||||
|
|
|
|
PL |
||
R2: |
IF e(kT) = PS AND e& (kT) < 0 |
|||||
|
THEN u((k+1)T) = (1−μ (e(kT))) . u(kT) |
|||||
|
|
|
|
PS |
||
R3: |
IF e(kT) = NL AND e& (kT) < 0 |
|||||
|
THEN u((k+1)T ) = −μ (e(kT)) . u(kT) |
|||||
|
|
|
|
NL |
||
R4: |
IF e(kT) = NS AND e& (kT) < 0 |
|||||
R5: |
THEN u((k+1)T ) = −(1−μNS(e(kT))) . u(kT) |
|||||
IF e(kT) = NL AND e& (kT) > 0 |
||||||
|
THEN u((k+1)T ) = μ (e(kT)) . u(kT) |
|||||
|
|
|
|
NL |
||
R6: |
IF e(kT) = NS AND e& (kT) > 0 |
|||||
|
THEN u((k+1)T ) = (1−μ (e(kT))) . u(kT) |
|||||
|
|
|
|
NS |
||
R7: |
IF e(kT) = PL AND e& (kT) > 0 |
|||||
|
THEN u((k+1)T ) = −μ (e(kT)) . u(kT) |
|||||
|
|
|
|
P L |
||
R8: |
IF e(kT) = PS AND e& (kT) > 0 |
|||||
|
THEN u((k+1)T) = −(1−μPS(e(kT))) . u(kT) |
|||||
where e& |
(kT) ≈ |
1 |
[e(kT) − e((k−1)T)], with initial conditions |
|||
|
||||||
|
|
|
T |
|||
y(0) = 0, |
e(−T) = e(0) = r − y(0), e& (0) = |
1 |
[e(0) − e(−T)] = 0 |
|||
|
||||||
|
|
|
|
|
T |
|

C. Defuzzification
Select membership functions for the different control outputs from the rule base
μN |
1 μZO |
μP |
|
|
|
|
|
u |
|
–H |
0 |
H |
||||
|
||||||
Figure 5 Typical membership functions for u
Then, the overall control signal, u, is generated by a weighted average formula:
N
åμiui (kT )
|
i=1 |
N |
|
|
|
, (mi ³ 0, åμi > 0) |
|
u((k+1)T) = |
N |
||
å μi |
|||
|
i =1 |
||
|
i=1 |
|
where control outputs ui(kT), i = 1, ..., N=8 are from the rule base.

Overview of Conventional PID Controllers
In the time domain:
(i) P-controller |
u(t) = KP e(t) |
||
|
t |
||
(ii) I-controller |
u(t) = KI òe(τ) dτ |
||
|
0 |
|
|
(iii) D-controller |
u(t) = KD |
d |
e(t) |
dt |
|||
Control gains, KP, KI, and KD, are constants to be determined in the design for set-point tracking and stability consideration.
r |
+ |
e |
|
KP |
u |
system |
y |
|
|
||||||
|
|
– |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
(a) |
Proportional controller |
|
|||
r |
+ |
e |
|
t |
u |
|
y |
|
KIò |
system |
|||||
|
|
– |
|
|
|||
|
|
|
0 |
|
|
|
|
|
|
(b) |
Integral controller |
|
|||
r |
+ |
e |
|
KDd |
u |
system |
y |
|
|
– |
|
dt |
|
|
|
|
|
(c) |
Derivative controller |
|
|||
|
|
Figure 6. |
Conventional PID controllers |
|
|||
In the frequency domain:
(i) P-controller |
U(s) = KP E(s) |
||
(ii) I-controller |
U(s) = |
K I |
E(s) |
|
|||
|
|
s |
|
(iii) D-controller |
U(s) = KD s E(s) |
||
Use Laplace transform L{×} for continuous-time signals:
U(s) = L{ u(t) } and E(s) = L{ e(t) }
Use z-transform Z{×} for discrete-time signals.
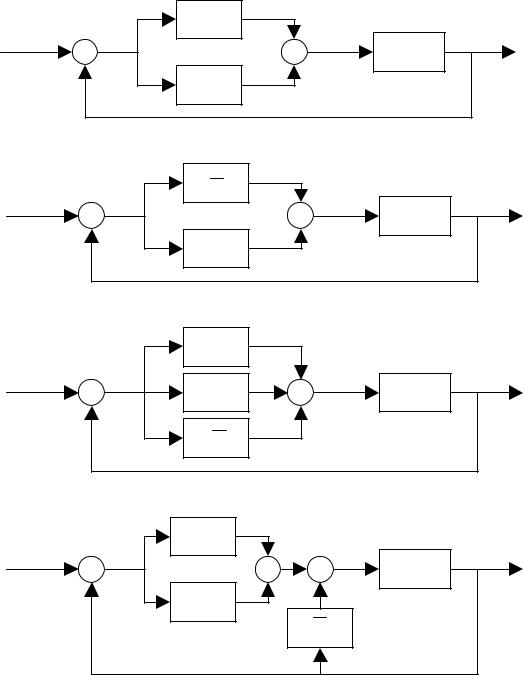
r |
+ |
KIò0t |
|
|
|
+ |
u |
y |
|
e |
|
|
|
|
|||||
|
|
|
|
|
|
|
+ |
|
system |
|
|
− |
|
|
|
|
|
|
|
|
|
KP |
|
|
|
|
|
||
(a) |
PI controller |
|
|
|
|
|
|
|
|
|
|
K d |
|
|
|
|
|
||
r |
+ |
e |
Ddt |
|
|
+ |
u |
y |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
+ |
|
system |
|
|
− |
KP |
|
|
|
|
||
|
|
|
|
|
|
|
|
||
(b) |
PD controller |
|
|
|
|
|
|
|
|
|
|
|
KP |
|
|
|
|
|
|
r |
+ |
e |
|
t |
|
+ |
+ |
u |
y |
|
|
KIò0 |
|
+ |
|
system |
|||
|
|
− |
|
dtd |
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
(c) |
PID controller |
|
|
|
|
|
|
|
|
|
|
K ò0t |
|
|
|
|
|
|
|
r |
+ |
I |
|
|
+ |
|
+ |
u |
y |
e |
|
|
|
||||||
|
|
|
|
|
+ |
|
|
|
system |
|
|
− |
|
|
|
|
− |
|
|
|
|
KP |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
KDdt |
|
|
(d) |
PI+D controller |
|
|
|
|
|
|
|
|
Figure 7 Some typical combination of P, I, D controllers.