

Слижевский Гидробионика в судостроении
.pdfГЛАВА 3 |
81 |
|
|
Многие рыбы с одинаковым успехом могут передвигаться назад, например, нож-рыба. Колебания ее ленточных плавников являются своеобразным и интересным примером колебаний, не только создающих движущую силу, но и управляющих движением рыбы. Для создания движущей силы в направлении движения плавники совершают колебания в виде волн, проходящих вдоль тела в направлении, противоположном движению. При поступательном движении вперед пропульсивные волны проходят в сторону хвостовой оконечности, при движении назад – от хвостового плавника к голове. При стоянии на месте в положении готовности к движению пропульсивные волны хвостовой и носовой частей проходят в противоположных направлениях к середине тела гидробионта.
Сравнивая эффективность двух разновидностей (угревидного и скомброидного) волнового движения рыб, можно признать более эффективным угревидный способ плавания. Несмотря на это, в современной гидробионике наибольший интерес представляет плавниковая форма плавания скоростных рыб и китообразных. Они также совершают волнообразное движение телом, однако основную часть движущей силы создает развитый машущий хвостовой плавник. Плавник имеет характерную форму: "серповидную" у скоростных тунцовых и ксифиоидных рыб и "полулунную" у китообразных. Машущий серповидный плавник скоростных рыб жесткий и узкий, имеет большое относительное удлинение λ > 5…6 и высокую частоту, а полулунный плавник китообразных упругий, относительно широк, с λ ≈ 4 и низкочастотный: f < 4 с–1.
И, наконец, один из механизмов движения гидробионтов – гидрореактивный движитель. Обладателем такого движителя является, например, медуза. В этом случае функцию движителя выполняет купол медузы. Вода, заключенная в пространство под куполом, мышечным усилием выталкивается с частотой 1…10 импульсов в минуту. Значительно эффективнее этот тип движителя у головоногих моллюсков (кальмары, осьминоги и каракатицы). Так, некоторые виды кальмаров, используя водометный движитель, могут выпрыгивать из воды на значительную высоту (более 1 м) и планировать в воздухе.
Тело головоногого моллюска мягкое, упругое и может существенно деформироваться. Его охватывают ромбовидные плавники, которые играют роль продольных килей, хорошо стабилизиру-
82 |
ГИДРОБИОНИКА В СУДОСТРОЕНИИ |
|
|
ющих и управляющих движением в пространстве. Эти плавники используются при медленном перемещении кальмара за счет образования на их поверхности пропульсивных волн, бегущих вдоль длины моллюска. При более быстром движении кальмар плывет толч- ками с частотой выброса гидрореактивного движителя 1…2 выброса в секунду при обычной скорости и 5 выбросов – при увеличении скорости движения кальмара.
3.2. Волновой движитель
Волновым движителем назовем хорошо обтекаемое и поступательно перемещающееся удлиненное гибкое тело, которое деформируется по закону поперечной бегущей волны, именуемой пропульсивной и распространяющейся от передней к кормовой кромке тела. При этом длина волны равна или меньше длины тела, ее амплитуда соизмерима с поперечными размерами тела, а фазовая скорость больше скорости движения гидробионта. Следует подчеркнуть, что волновой способ плавания наблюдается при числах Re = 0,1…108 и, таким образом, охватывает весь диапазон плавания водных животных. Причем нижнее число Re характерно для плавания микроскопиче- ских организмов, а наибольшее – для китообразных.
В природе наблюдается несколько различных модификаций волнового способа плавания. Водные животные, у которых амплитуда пропульсивной волны постоянна по длине гидробионта, плавают угревидным способом. Таким способом плавают угри, змеи, сарганы. Большое количество гидробионтов (кефаль, ставрида, форель и др.) плавают скомброидным способом, когда амплитуда пропульсивной волны изменяется по длине гидробионта, увеличиваясь от носа к хвосту.
Принцип действия волнового движителя гидрореактивный, состоит в создании движущей силы за счет отбрасывания пропульсивной волной воды в сторону, противоположную направлению движения гидробионта.
Экспериментальные исследования волнового движения гидробионтов, а также теоретические решения с использованием различ- ных моделей волнового движителя (тонкая гибкая пластинка или профиль, удлиненное гибкое тело) позволили обнаружить следующие особенности и закономерности волнового движения гидроби-
ГЛАВА 3 |
83 |
|
|
онтов и гидродинамики волнового движителя:
1.Результаты теоретических исследований показывают, что оп-
ределяющими эффективность работы волнового движителя параметрами являются: волновое число α = 2π/λ (λ – длина пропульсивной
волны), относительная (редуцированная) частота пропульсивной
волны σ = ω/υ0 (ω = 2πn – круговая или циклическая частота пропульсивной волны; υ0 – скорость натекающего потока, равная скорости движения гидробионта), а также закон изменения амплитуды пропульсивной волны в направление бега волны.
2.Анализ результатов теоретических расчетов коэффициента
|
= |
|
T |
|
|
|
|
òÿãè C T |
|
|
(T – осредненное значение тяги, создаваемой вол- |
||||
|
ρυ 20 |
|
|||||
|
|
|
Ω |
||||
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
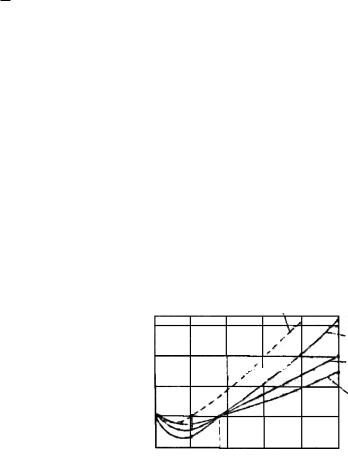
новым движителем; Ω – смоченная поверхность), приведенных на рис.3.1, позволяет сделать следующие выводы:
при заданных волновом числе α и законе изменения амплитуды вдоль хорды волнового движителя α(x) величина CT тем больше, чем больше относительная частота σ. При этом существуют следующие режимы работы волнового движителя: σ < α, при котором фазовая скорость волны с = λ/τ (τ – период волны) меньше скорости натекания υ0, поэтому CT < 0 и, таким образом, возникает сила сопротивления; σ = α, при котором с = υ0 è CT = 0 (критическая скорость); σ > α и, таким образом, с > υ0. В этом случае возникает
положительная тяга CT > 0;
уменьшение волнового числа α при прочих равных условиях [α(x) = const и σ = const] приводит к увеличению коэффициента тяги CT;
|
ÑÒ |
|
Рис.3.1. Кривые коэффициента |
0,04 |
|
|
||
тяги волнового движителя: |
0,02 |
|
1 – α0 = 0,0830; α1 = 0; α2 = 0; α = π; |
||
|
||
2 – α0 = 0,0624; α1 = 0,0624; α2 = 0; |
0 |
|
α = π; 3 – α0 = 0,0230; α1 = 0,0340; |
|
α2 |
= 0,0340; α = π |
–0,02 |
|
|
0
|
|
2 |
|
|
|
|
2 |
|
2 |
π |
3 |
|
= |
= |
|
α |
α |
|
|
|
|
||
|
|
|
1
2 s = a = p 6 |
8 |
s |

84 |
ГИДРОБИОНИКА В СУДОСТРОЕНИИ |
оптимальным законом α(x) = α0 + α1x + α2x2 изменения амплитуды вдоль тела гидробионта является линейный закон (кривая 2 на рис.3.1).
3.Потеря механической энергии на волновом движителе обусловлена наличием вихревого следа и поэтому КПД волнового движителя h < 1 – величина, которая зависит от режима его работы.
Для волнообразно деформируемой пластины для всех значений
σ/α > 1 (ñ > υ0) КПД η > 0,50 и достигает η = 0,80…0,90. Для телесного волнового движителя с увеличением толщины происходит падение его гидродинамических характеристик CT è η.
4.Теоретические исследования и оптимизация тонкого упруго-
го волнового движителя показали, что гидродинамические характеристики в этом случае зависят наряду с σ и α от плотности и изгиб-
ной жесткости материала, из которого изготовлен волновой движитель. Более того, установлено, что на оптимальных режимах (с = 1,2υ0
èη = 0,80) существует участок небольшой протяженности и отстоящий на расстоянии 0,7В (В – хорда волнового движителя), который не нагружен и, таким образом, не создает тяги. Это позволяет делать его менее широким и тем самым уменьшить сопротивление волнового движителя. Такой теоретический результат позволяет объяснить существование у рыб и китообразных зауженных переходных участков от тела к хвостовому плавнику.
Как показали исследования, для упругих волновых движителей существует оптимальное значение жесткости, при котором КПД при
η |
|
|
|
|
|
|
|
|
|
прочих равных условиях достигает |
|
|
|
|
|
|
|
|
|
|
своего максимального значения. |
|
|
|
n =3 |
|
|
|
|
|
5. Сравнение эффективности угре- |
|
|
|
|
|
|
|
|
|
|
||
0,9 |
|
|
|
|
|
|
|
|
|
видного и скомброидного способов |
|
|
|
|
|
|
|
|
|
плавания (двух разновидностей волно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
n =2 |
|
|
|
|
вого движения гидробионтов), приве- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
денное на рис.3.2, позволяет сделать |
||
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n=1 |
|
|
|
|
Рис.3.2. Зависимость гидродинамиче- |
|||
0,7 |
|
|
|
|
|
ского КПД η от относительной скоро- |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ñòè ñ/υ0 пропульсивной волны для угре- |
|
|
|
|
|
|
|
|
|
|
видного (1) и скомброидного (2) спосо- |
0,6 |
|
|
|
|
|
|
|
|
|
бов плавания; n – число пропульсивных |
|
|
|
|
|
1,0 1,0 1,0 ñ/υ0 |
волн на длине рыбы |
||||
1,0 1,0 1,0 |
||||||||||
ГЛАВА 3 |
85 |
|
|
следующие выводы:
при скомброидном способе плавания и одинаковых значениях относительных скоростей с/υ0 пропульсивной волны КПД меньше, чем при угревидном способе плавания. При этом максимальное зна- чение КПД при угревидном способе плавания достигается при относительной скорости с/υ0 = 1, в то время как при скомброидном способе – при 1,0 < с/υ0 <1,2;
величина КПД при скомброидном способе плавания стремится к соответствующей величине при угревидном способе плавания с увеличением числа n пропульсивных волн.
3.3.Машущий плавниковый движитель
Âотличие от волнового движителя, когда его функции выполняют гибкое тело и плавники гидробионта, машущим плавниковым движителем скоростных гидробионтов назовем крыло, выделяющееся относительно большим размахом и наличием стреловидности в плане, которое совершает большие поступательно-крутильные колебания и создает относительно большую тягу.
Распространение движителя типа "машущее крыло" в живой природе обусловлено тем, что для живых организмов наиболее простым является колебательное движение. В некоторых случаях обнаруживается превосходство и высокая эффективность машущих движителей по сравнению с другими движителями. Наблюдения и эксперименты, выполненные в натурных условиях и на экспериментальных установках, позволяют сделать вывод о наиболее эффективном
резонансном режиме работы плавникового движителя, когда n = nk, ãäå nk – критическая частота колебаний плавника, соответствующая максимальной амплитуде колебаний.
Практическое применение машущего крыла в качестве движителя более перспективно в водной среде. В авиации машущее крыло в качестве движителя не применяется ввиду конструктивных сложностей, а также трудностей, связанных с обеспечением его прочности при действии больших инерционных усилий. Напротив, в более плотной среде (воде) для создания необходимой тяги требуется машущее крыло значительно меньших размеров и совершающее попе- речно-крутильные колебания с относительно малыми амплитудами и частотами. При этом инерционные силы оказываются значитель-

86 ГИДРОБИОНИКА В СУДОСТРОЕНИИ
но меньшими по сравнению с гидродинамическими. Более того, машущий плавниковый движитель по сравнению с волновым более перспективен для технических средств движения в воде.
|
|
|
|
|
|
Рассмотрим более подробно |
|
|
h |
|
|
||
|
|
|
|
схему работы машущего движителя, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
представляющего собой жесткое |
|
|
|
|
|
|
|
|
|
|
|
|
|
крыло конечного размаха (рис.3.3). |
|
|
|
|
|
|
Пусть машущий движитель, |
|
|
|
|
u |
||
|
|
|
|
движущийся в направлении оси ξ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
со скоростью υ0, совершает совме- |
h |
|
|
|
|
|
|
|
|
|
|
|
стные гармонические попереч- |
|
|
|
|
|
|
|
|
|
но-поступательные и крутиль- |
|
x |
||
ные колебания с одинаковой |
||
|
||
|
круговой частотой ω = 2πn и |
|
|
||
|
углом сдвига фаз ϕ: |
|
|
η = acos ωt è β = cos β0 (ωt + ϕ), |
ãäå a è β0 – амплитуды попереч- но-поступательных и крутильных колебаний соответственно.
В рассматриваемой системе координат положительными попе- речно-поступательными перемещениями будут считаться перемещения вдоль оси η, а крутильными – против часовой стрелки.
Поперечно-поступательные колебания движущегося с постоянной скоростью υ0 крыла приводят к возникновению переменного во времени угла скоса потока
γ = arctg υu0 ,
ãäå u = dη = − αωsinωt – скорость поперечных поступательных коdt
лебаний крыла.
Таким образом, с учетом крутильных колебаний β(t) мгновенный угол атаки крыла будет
|
|
|
|
|
α ( t ) = β + γ = β 0 |
|
− |
αω sinωt |
|
cos( ωt + ϕ ) + arctg |
υ |
. |
||
|
|
|
0 |
|

ГЛАВА 3 |
87 |
|
|
При этом скорость обтекания крыла |
|
W = u 2 + υ 20 = α 2 υ 2 sin 2 |
ωt + υ 20 . |
Каждому значению угла атаки α(t) будут соответствовать мгновенные значения подъемной силы Ry и лобового сопротивления Rx (где Oxy – связанная с крылом система координат). Проектируя эти силы на горизонтальную Oξ и вертикальную Oη оси координат, получим мгновенные значения тяги T и поперечной силы P:
T = Ry sin ϕ – Rxcos ϕ; P = Rycos ϕ – Rxsin ϕ. Соответствующим выбором закона поперечно-поступательных
и крутильных колебаний крыла можно достичь ситуации, при которой осредненная за период колебаний сила тяги T будет совпадать с направлением движения вдоль продольной оси Oξ. Наиболее оптимальным с этой точки зрения угол сдвига фаз ϕ = π/2 крутильных по отношению к поперечно-поступательным колебаниям крыла.
Результаты теоретических и экспериментальных исследований отечественных и зарубежных авторов (ЦАГИ, институт гидромеханики АН Украины, Германии, США и др.) гидродинамики машущих крыльев, имеющие практическое значение:
наиболее оптимальным, при котором достигается максимальное значение КПД, является синусоидальный закон поперечных и крутильных колебаний с углом сдвига фаз ϕ = π/2;
при малых скоростях υ0 поступательного движения и, следо-
вательно, при больших числах Струхаля Sh = ωυb >> 1 (где b – хорда
0
крыла) независимо от конкретного закона колебательных движений КПД η = 0,5. При этом максимальное значение коэффициента тяги
достигается при чисто поступательных поперечных колебаниях. При чисто угловых колебаниях значение Cò max на порядок меньше Cò max при поперечно-поступательных колебаниях;
при больших скоростях υ0 (наиболее интересный с практической точки зрения случай) и, соответственно, малых числах Струхаля и оптимальном значении угла сдвига фаз ϕ = π/2 среднее значе-

88 |
ГИДРОБИОНИКА В СУДОСТРОЕНИИ |
||
|
|
|
|
|
|
|
|
ние коэффициента тяги C T зависит от относительного расстояния оси поворота крыла (оси баллера) до середины хорды x0/b è ñîîò-
ношения амплитуд поперечно-поступательных и крутильных коле-
|
∂e = |
β 0 b |
|
баний |
|
a |
. При этом максимальное значение КПД машущего |
|
|
||
движителя достигается при чисто поперечно-поступательных и минимальное – при чисто крутильных колебаниях. В этом случае максимальное значение тяги машущего движителя достигается при следующих соотношениях амплитуд поперечно-поступательных и крутильных колебаний:
|
|
|
|
a |
> |
|
π |
+ ϕ |
2 |
|
+ |
π |
+ ϕ |
2 |
|
2 |
2 |
, |
||
|
|
|
|
|
|
|
|
Sh |
|
|
Sh |
+ ϕ |
|
|||||||
|
|
|
β |
0 b |
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
ãäå Sh = |
ωb |
è ϕ = 1+ |
|
|
x0 |
|
. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
υ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0 |
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
М.Ю.Чопра (Англия) были исследованы гидродинамические характеристики фигурных в плане крыльев (рис.3.4). Путем сопоставления результатов расчетов было установлено, что искривление передней кромки приводит при прочих равных условиях к увеличе- нию силы тяги, создаваемой машущим движителем. Однако слишком большая стреловидность (превышающая 30°) приводит, наоборот, к ухудшению эффективности движителя. Наиболее близким к оптимальному оказалось крыло В2, имеющее умеренную стреловид-
ность передней и задней кро-
|
|
|
|
|
|
|
ìîê. |
|
|
|
|
|
|
|
Анализ результатов экс- |
|
|
|
|
|
|
|
периментальных исследова- |
u0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ний ЦАГИ позволил сделать |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вывод, что увеличение отно- |
|
|
|
|
|
|
|
сительной толщины профи- |
|
|
|
|
|
|
|
ля, которое ухудшает его не- |
|
|
|
|
|
|
|
сущие свойства, приводит к |
|
|
À1 |
À2 |
Â1 |
Â2 |
Â3 |
|
|
увеличению тяги и КПД ма- |
||||||
|
|
|
|
|
|
|
|
Рис.3.4. Формы крыльев, исследуемых |
шущего движителя. Напом- |
||||||
|
|
|
М.Ю.Чопра |
|
|
ним, что у китообразных |
|

ГЛАВА 3 &'
машущие плавники относительно толстые (у серого кита и кашалота они составляют 26…29 %); исследования показали более высокую эффективность упругого и гибкого машущего движителя по сравнению с жестким.
Кроме того, анализ результа- |
R ò, Í |
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|||
тов экспериментальных исследо- |
|
|
|
|
|
5,5 |
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
||||||
ваний позволил установить квад- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
f=3,1 |
|||
ратичный закон зависимости |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
ñèëû òÿãè RT от амплитуды β0 è |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
частоты f крутильных колеба- |
|
|
|
|
|
|
|
|
|
|
ний при поступательно-крутиль- |
|
|
|
|
|
|
|
|
|
|
ных колебаниях машущего дви- |
|
|
|
|
|
|
|
|
|
|
|
0 |
5 |
10 15 >0, ãðàä |
|||||||
жителя (рис.3.5). При больших |
|
|||||||||
f ≥ 16 c–1 наблюдалось существен- |
|
|
|
|
|
|
|
|
|
|
Рис.3.5. Гидродинамические |
||||||||||
ное нарушение квадратичной за- |
||||||||||
характеристики машущих крыльев |
||||||||||
висимости RT(β0). Более того, в |
||||||||||
|
|
|
|
|
|
|
|
|
||
этом случае при β0 > 10° происходит уменьшение тяги с увеличени- |
||||||||||
ем амплитуды β0 крутильных колебаний, что, видимо, связано с |
||||||||||
отрывом пограничного слоя. |
|
|
|
|
|
|
|
|
|
|
Одним из интересных явлений, обнаруженных при исследова- |
||||||||||
нии живых дельфинов и китов, представляющим теоретический и практический интерес, является свойство саморегулирования гидроупругости плавников китообразных, открытое в 1968 г. коллективом ученых Зоологического института АН СССР. Установлено, что саморегулирование упругости плавников китообразных возникает рефлекторно при изменении режима движения и обусловлено действием артериовенозных сосудов, а также особым строением покровных тканей плавников. Автоматическое регулирование упругости плавников, связанное с изменением режима плавания, происходит во всех плавниках китообразных, хотя и с некоторым разли- чием.
Когда скорость плавания дельфина увеличивается, его метаболизм, а потому и циркуляция крови повышаются, хвостовой машущий плавник автоматически становится жестким и упругим. И наоборот, с замедлением движения упругость плавника понижается. Это вполне отвечает наиболее эффективной работе машущего плавникового движителя с большими амплитудами колебаний.
Регулируемый гидроупругий эффект в плавниках китообразных

90 |
ГИДРОБИОНИКА В СУДОСТРОЕНИИ |
|
|
срабатывает достаточно быстро и плавно. Об этом можно судить по анализу скоротечных переходных процессов в плавании дельфина (внезапный разгон, резкая остановка), которые происходят с большими продольными ускорениями и предъявляют жесткие требования к прочности хвостового плавника. Наблюдения показывают, что находящийся в покое дельфин в состоянии одним большим взмахом хвостового плавника продвинуться вперед на расстояние, равное 2…3 длинам тела. И напротив, быстро плывущий дельфин (6…8 м/с) способен осуществить торможение на длине, равной полудлине его корпуса. При этом продольное замедление с ускорением 10 м/с2 и более граничит с ударом. Очевидно, что в этих условиях упругость плавника должна изменяться плавно и точно регулироваться.
Авторегуляция упругости гидродинамически целесообразна также ввиду экстремального вида амплитудно-частотной характеристики колебаний хвостового плавника (рис.3.6). На рисунке изображены зависимости размерной A и безразмерной A/Am (Am – максимальная амплитуда) амплитуд колебаний морской свиньи и белобочки в зависимости от частоты колебаний n точки развилки лопастей хвостового плавника при регулярном поступательном движении дельфина.
A, ì
0,36
0,28
0,20
0,12
0
A/Am
0,5
0
Обращают на себя внимание большие размахи колебаний и резко выраженные пики у разных дельфинов, практически при одной и той же частоте n = 1,5 Гц. Назовем эту частоту, соответствующую максимальному размаху хвостового
1 плавника, критической nk.
2
3
1,0 2,0 3,0 ï, Ãö
à
0,5 1,0 1,5 2,0 ï/ïí
á
Рис.3.6. Экстремальная амплитудно- частотная характеристика колебаний хвостового плавника дельфинов:
а – размерная, A(n); б – безразмерная; A – полный размах (удвоенная амплитуда), n – частота колебаний; 1 и 2 – морская свинья длиной соответственно 1,11 и 1,35 м; 3 – белобочка длиной 1,53 м