

3.2.2. Реализация линейного интерполятора на цда.
В качестве элементной базы для аппаратной реализации интерполятора на ЦДА выбрана наиболее распространенная и имеющая развитый набор элементов серия инте-гральных микросхем (ИМС) К155. Принципиальная электрическая схема интерполятора на ЦДА показана на рис. 4.
Узел конца обработки кадра (КОК) служит для выработки сигнала КОК, разде-ляющего соседние кадры в программе – после отработки очередного кадра необходимо осуществить остановку интерполятора для ввода новой информации в регистры RG∆x, RG∆y. Узел КОК состоит из инвертора К155 ЛН1 (D4.1), триггера К155 ТМ2 (D5) и двух-входового элемента И К155 ЛИ1 (D1).
Сигнал логической единицы с выхода элемента И (D1) запускает генератор импульсов. После числа импульсов максимального перемещения в кадре (в данной схеме - 16) по заданному фронту импульса с делителя на 16 обнуляется триггер D5 и запре-щается прохождение управляющей логической единицы на генератор импульсов. Повтор-ный запуск интерполятора осуществляется установкой триггера D5 в единичное состояние по входу S.
Блок ввода информации (БВИ) необходим для записи и кратковременного хране-ния информации о приращениях координат ∆x, ∆y. Для записи информации использованы кнопочные переключатели типа П2К, регистры RG∆x, RG∆y построены на ИМС К155ТМ8 (D8, D11).
Необходимые функции логического умножения и сложения реализованы на ИМС К155 ЛР3 (D12, D13), выполняющие операцию И–ИЛИ–НЕ, и ИМС К155 ЛН1 (D4.2, D4.3), выполняющие операцию инвертирования.
Узел индикации выходных импульсов интерполятора выполнен на малогабарит-ных индикаторах типа Ф207, предназначенных для отображения информации в различных цифровых приборах. Индикатор работает в режиме последовательного ввода информации, для чего входящие в счетчик индикатора триггеры, реализованные на ИМС серии К217, соединены последовательно.
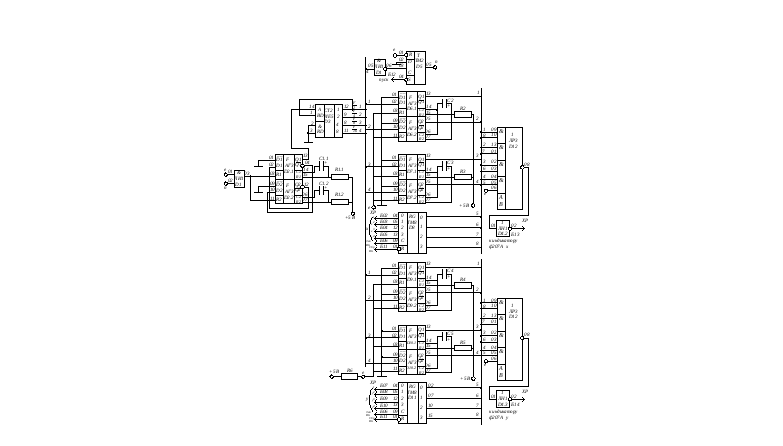
Рис. 4. Схема электрическая принципиальная интерполятора на ЦДА
Генератор импульсов построен на ждущих мультивибраторах с перекрестными связями с использованием ИМС К155АГ3 (D2). Микросхема содержит два ждущих мультивибратора, каждый из которых имеет двухвходовую логику для запуска по переднему или заднему фронту входного импульса, вход обнуления и выводы для под-ключения времязадающей RC – цепи: R = 1 кОм, C = 500 мкФ, что позволяет получить на выходе генератора частоту F = 2 Гц. Взаимный пуск одновибраторов осуществляется за счет перекрестных связей с инверсного выхода одного одновибратора на вход другого.
Двоичный счетчик построен на четырёхразрядном асинхронном двоичном счетчике К155ИЕ5 (Д3). Для получения пересчета на 16 выходы первого делителя соеди-нены с входом второго объединением выводов 12 и 1. Счетчик без дополнительной логики в этом случае позволяет делить на 2, 4, 8, 16. На выходах счетчика для формиро-вания импульсов, поступающих на входы схем И, используются одновибраторы на ИМС К155 АГ3 (D7, D8, D9, D10), управляемые передним фронтом импульсов с соответ-ствующих выходов счетчика.
3.3. Линейный интерполятор с оценочной функцией.
3.3.1. Принцип построения линейного интерполятора с оценочной функцией.
Интерполируемая прямая ОА (рис. 5) разделяет плоскость первого квадранта координат X, Y на две области: область над прямой ОА, где оценочная функция
![]()
с
координатами текущего положения режущего
инструмента xi
, yj
и координатами xk
, yk
точки А больше нуля (![]() )
и область под прямой ОА, где
)
и область под прямой ОА, где
![]() .
Сам интерпо-лируемый отрезок ОА
представляет собой область
.
Сам интерпо-лируемый отрезок ОА
представляет собой область
![]() .
.
Для
того, чтобы аппроксимация отрезка ОА
происходила с точностью не хуже одной
дискреты, очередной шаг интерполяции
должен происходить с учетом знака
оценочной функции. Если промежуточная
точка траектории интерполяции находится
в области
![]() ,
то следующий шаг делается по оси Х.
,
то следующий шаг делается по оси Х.
Если
же промежуточная точка траектории
находится в области
![]() ,
то следующий шаг – по оси Y.
,
то следующий шаг – по оси Y.
![]()
Поскольку
работа интерполятора происходит в
относительной системе координат, начало
интерполируемого отрезка всегда
находится в начале координат, когда
![]() ,
и, следовательно, первый шаг всегда
делается по оси Х.
Для каждой промежуточной точки траектории
интерполяции величина оценочной функции
,
и, следовательно, первый шаг всегда
делается по оси Х.
Для каждой промежуточной точки траектории
интерполяции величина оценочной функции
![]() зависит от координат конеч-ной точки
xk
, yk
интерполируемого отрезка, вводимых из
программы.
зависит от координат конеч-ной точки
xk
, yk
интерполируемого отрезка, вводимых из
программы.
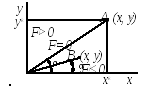
Рис. 5. Линейная интерполяция по оценочной функции
При шаге по оси Х координата yj промежуточной точки не меняется, а координата xi увеличивается на одну дискрету
![]() .
.
При шаге по оси Y координата xi промежуточной точки не меняется, а координата yj увеличивается на одну дискрету
![]() .
.
Величина и знак оценочной функции после шага по оси Х определяется как
![]()
Величина и знак оценочной функции после шага по оси Y равна
![]()
Следовательно, для определения нового значения оценочной функции необходимо знать значение оценочной функции для предыдущей точки и координаты конечной точки интерполируемого участка.
Работа линейного интерполятора с оценочной функцией заключается в выработке признака перемещения режущего инструмента по той или иной координате в зависимости от знака оценочной функции в промежуточной точке траектории, вычисления координат точки, в которую сделан шаг, и вычисления величины оценочной функции в этой точке. Кроме того, интерполятор определяет окончание процесса интерполяции, сравнивая значения координат промежуточных и конечной точки интерполяции.